
无人直升机着陆过程边界保护控制技术研究
2019-09-25 13:22王刚强
数字技术与应用 2019年6期
王刚强
摘要:无人直升机着陆过程的关键是下降速度的平稳控制和位置的精确控制,以避免较大的速度触地或偏离着陆点过远引发的安全风险。针对该问题提出了一种无人直升机着陆过程边界安全保护策略,利用高度通道控制律切换和总距自动配平解决下降速度异常,通过高精度位置控制律以及垂向和位置回路的协同解决位置偏差。通过半物理实时仿真验证了该控制方法的有效性。
关键词:无人直升机;着陆;位置控制;下降速度
中图分类号:V249.1 文献标识码:A 文章编号:1007-9416(2019)06-0004-03
0 引言
无人直升机具备可垂直起降的飞行能力,随着逐步推向应用,其可垂直起降的特点是其应用的显著优势。同时在进行垂直着陆时,此时相对于前飞状态,直升机稳定性变弱。由于着陆过程为近地阶段,风场环境变化复杂,着陆场地的限制,可能出现接近或超出安全边界的情况。本文针对无人直升机着陆的边界保护控制进行研究,提出边界保护控制策略,并进行了控制律设计和仿真验证。
1 控制策略设计
1.1 着陆过程描述
无人直升机完成飞行任务后,进入回收点上空悬停等待着陆,根据操纵权限可以分为人工着陆和自动着陆两种方式。人工着陆为地面站操纵人员发出操纵指令,在着陆过程中,纵横通道和航向通道处于混合控制方式,即当操纵人员不进行操纵时,控制通道处于控制保持状态,总距通道处于人工全权限控制。自动着陆为飞控系统自动执行着陆流程,为应对突发情况人工操纵量随时可以进行干预。着陆过程可分为三个阶段:悬停位置调整、稳定下降、触地阶段[1]。
(1)悬停位置调整阶段。飞机前飞进场,纵向控制通道采用速度控制,横向控制通道采用航迹侧偏控制。完成减速后,悬停位置需要再进行调整,以保证悬停在回收点正上空,并保持定点悬停,为着陆作准备。(2)稳定下降阶段。此阶段直升机总距控制通道实时跟踪下降速度指令,位置控制通道和航向都是保持控制。下降速度指令分段处理,当地效区外时,以较快速度下降,进入地效区后,气动特性发生较大变化,为保证稳定,需要考虑起落架抗冲击能力,采用较小的安全速度下降。同时由于飞机已经距离地面较近,由于受到回收點附近地面状态、建筑物、树木等障碍物的限制,对纵横向的位置控制精度提出着很高要求。(3)触地阶段。当直升机接近触地时,直升机处于高总距状态,在临界状态如果受到气流扰动容易出现地面滑动的危险状态,应该快速减小总距。在地面状态下,纵横向位置如果存在偏差,在积分作用下,会出现桨盘倾斜以修正位置偏差,所以此时应断开纵横向控制。发动机由额定状态过渡至慢车、暖车、怠速和停车,完成整个着陆过程。由人工着陆和自动着陆的处理过程,可以看出下降阶段着重需要对下降速度和位置的边界保护控制进行重点研究。
1.2 位置保护策略设计
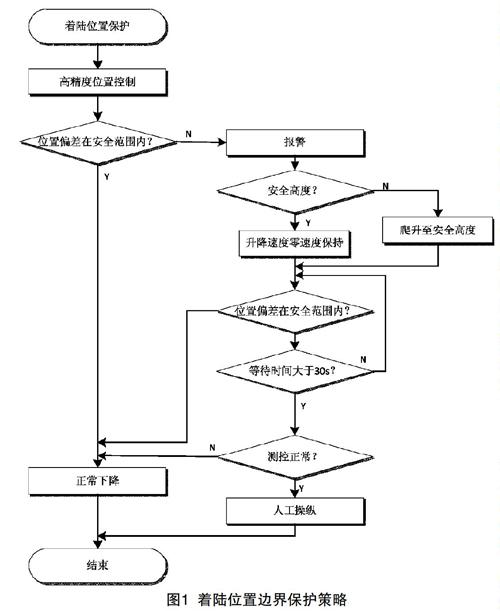
这里采用一种基于非线性反馈的高精度位置控制律,提升位置控制的抗扰性能。另外考虑到无人直升机受到超出能力的强阵风干扰时,容易出现较大位置偏差,超出安全范围,此时如果继续着陆,就会发生安全事故。因此需要设计位置偏差安全保护策略,改变垂向控制和位置控制相互独立,无法协同解决着陆风险的问题。位置安全保护策略如图1所示。
通过高精度位置控制实现着陆范围在安全范围内,高精度位置控制的横侧向速度指令由位置偏差产生;当着陆位置超出边界后,说明高精度位置控制已经无法平衡干扰,应立刻报警,然后减小下降速度,进入升降速度零速度保持状态。判断当前高度是否能够保证飞机安全,如果高度不足则转为爬升状态,直到安全高度。直升机高度通道进入定高状态后,等待位置回路逐渐消除位置偏差,待飞机重新回到位置安全范围后重新启动下降过程,如果等待了30s依然无法消除过大的位置偏差,则终止自动着陆,采用人工操纵方式应急处置,如果此时测控链路异常,为防止始终无法着陆的风险,继续下降完成自动着陆。
1.3 下降速度保护策略设计
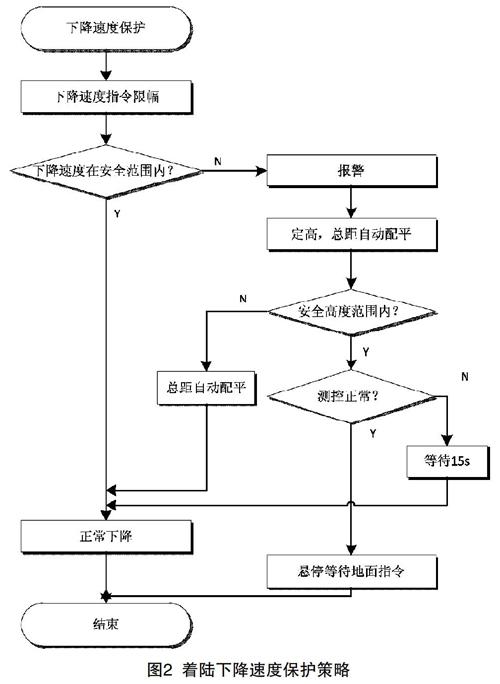
无人直升机在着陆控制中,如果下降速度过大,会使旋翼进入涡环状态,然后旋翼产生的力混乱、减小,直升机很容易失去高度。所以,必须严格控制下降速度,避免进入涡环。另外由于飞机结构抗冲击能力限制,也必须对触地瞬间的下降速度进行约束,因此需要综合两者。当直升机下降速度大于下降速度保护时,需要进入下降速度应急保护,垂向控制通道立刻接入定高,并启动总距自动配平,进入定高等待。判定高度是否安全,若高度足够,则进入悬停等待状态,然后判定测控链路状态,如果测控正常则等待地面站人员指令,若测控链路失效,则悬停等待15秒后重新开始下降过程。若低于安全高度,则在总距配平的同时继续完成着陆过程。着陆下降速度保护策略如图2所示。
2 控制律设计
2.1 位置控制律设计
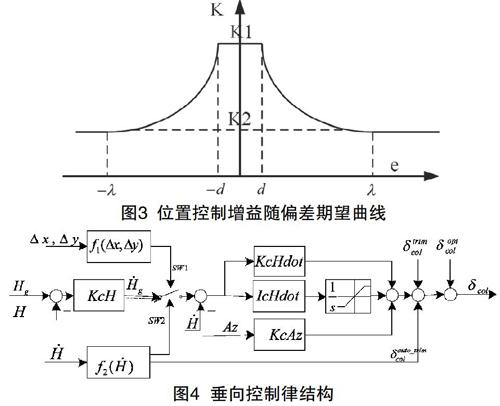
位置控制按照操纵通道分为纵向位置控制和侧向位置控制,姿态控制作为位置控制内回路,和位置控制回路并联实现无人直升机悬停小速度段位置保持和跟踪。这里为了提高位置控制的控制功效,以保证位置控制精度,采用非线性PID的方法,该方法核心思想为变增益控制策略[2]。当位置偏差很大时,采用常规位置控制律,主要通过人工遥调逐渐减小位置偏差,可以起到保障飞行安全的作用。当位置偏差到达一定范围内后,采用非线性反馈实现变增益控制,随着偏差变小增益增大。当位置偏差很小时,如果控制增益很大,容易引发过零震荡的稳定性问题,需要对控制增益进行限幅。位置控制增益期望变化曲线如图3所示。
纵向和侧向位置控制律结构相同,这里以纵向位置控制为例,如式(1)所示,式中为纵向周期变距配平,为俯仰角配平。
2.2 垂向控制律设计
垂向控制律的控制的目标为高度和垂向速度。控制律结构如图4所示,采用高度和升降速度控制环节串联结构,由高度偏差生成升降速度指令,升降速度控制采用比例-积分-微分型(PID)控制结构,垂向加速度改善垂向速度响应过程的阻尼特性,积分向改善高度和升降速度的控制精度。另外,增加垂向速度边界阈值判定,以及由位置控制律引入纵向和侧向位置偏差进行位置边界阈值判定,对高度控制回路的通断进行附加控制,实现边界保护控制策略。控制律结构图4和式(2)所示。式中,为总距配平,为垂向总距自动配平,为人工操纵总距量。
3 仿真驗证
基于半物理实时仿真环境设计了两项仿真科目,分别验证位置边界保护控制和下降速度边界保护控制[3]。仿真科目一:地面海拔高度为20m,样例无人直升机由离地30m高度悬停保持状态进入自主着陆流程,在下降过程中模拟风扰动,加入幅值10m/s的侧向水平阵风,模拟侧向位置超过边界。对比分析三种控制方式:(a)无位置边界保护+常规位置控制律;(b)位置边界保护+常规位置控制律;(c)位置边界保护+高精度位置控制律。仿真科目二:在下降过程中模拟下降速度异常波动,注入总距波动-4°,验证下降速率保护功能。
由图5可以看出,在阵风扰动加入后,控制方式a位置偏差迅速增大,在触地时,侧向位置偏差3.5m;控制方式b当位置偏差到达阈值时,进入了高度保持状态,位置控制有更多时间消除位置偏差,在触地时位置偏差1.3m;控制方式c采用非线性PID位置控制相对于常规位置控制,位置控制精度得到了明显提升,在10m/s风扰动环境下,可以保证位置偏差在安全范围内,在触地时位置偏差为0.9m。由图6可以看出当注入总距波动时,下降速率突然增大,触发下降速率保护机制,下降速度迅速得到抑制,当不进行边界保护时,触地速度为-6m/s,接入下降速度保护后触地速度为-0.5m/s,无人直升机可以安全着陆。
4 结语
本文针对无人直升机着陆提出了一种针对位置偏差和下降速度的边界保护策略,设计了位置控制律和垂向控制律,通过半物理实时仿真系统模拟实际着陆过程,验证了该控制方法能够很好解决着陆过程的安全边界保护问题。
参考文献
[1] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[2] 尹亮亮,黄一敏.无人直升机高精度位置控制[J].飞行力学,2012,30(4):324-327.
[3] Tanner O, Geering H P. Position an autonomous helicopter with high accuracy using robust controllers[C].AIAA Guidance, Navigation, and Control Conference and Exhibit. Montreal:AIAA,2001:1-17.
Research on Boundary Protection Control Technology for Unmanned Helicopter Landing Process
WANG Gang-qiang
(China Helicopter Research and Development Institute, Jingdezhen Jiangxi 333001)
Abstract:To avoid safety risk caused by high speed landing or deviation from landing point, the key is the stability of descent speed control and the precision of position control for the landing process of unmanned helicopter. In order to solve this problem, a boundary control strategy for unmanned helicopter landing process is proposed, which used vertical control law switching and collective automatic trim to solve the abnormal descent speed, solving excessive position deviation is by means of high precision position control law and cooperation between vertical and position loop. The effectiveness of the control method is verified by hard-in-loop real-time simulation.
Key words:UAH; landing; position control; descent speed
