
浅谈船舶大型吊机及抗倾系统工作原理
2019-09-24 01:21易永光艾湖
广东造船 2019年4期
易永光 艾湖
摘 要:随着船舶发展从浅海走向深海,工作环境更加恶劣,对设备的安全性和操作的简单化、智能化要求更高,特别对船舶大型吊机设备要求更为突出。如何利用船舶自身的压载系统、通过优化控制系统、达到船舶大型吊机设备在海上工作的安全性和可靠性、提高船舶的海上工作效率、降低成本,具有十分重要的现实意义。
关键词:大型吊机;横倾系统;安全性;可靠性;优化
中图分类号:U667.5 文献标识码:A
Abstract: With the development of ships from shallow sea to deep sea, the working environment is worse, the demand for simplification and intelligence of equipment operation and the requirement of comprehensive change of work are higher, the working safety and operation simplicity of equipment are more important, and the energy consumption coefficient is also necessary, especially for the large marine crane at sea. In order to reduce the cost and improve the overall energy consumption coefficient of the ship, the ship's ballast system is used. By optimizing and installing the control system, the safety and reliability of the large marine crane at sea can be achieved, so as to improve the function of the ship, work efficiency at sea and reduce the cost.
Key words: Large marine crane; Anti-heeling; Security; Reliability; Optimization
1 前言
海洋环境复杂多变,船舶海上航行具有一定的风险,特别是利用船舶上的吊机在海上进行吊运工程作业时,更要重点考虑它的安全性和可靠性。使用现代化的设备和计算机软件模拟技术来提高海上危险作业的安全性,是全球海洋工程长期的战略選择。
海洋经济是海洋强国建设的重要内容,比如要发展海上风力发电项目,船舶必须加装或改装大吊机。目前许多多用途船其船型小、功能多、设备多、生产施工交叉作业多,船东要求加装大吊机,这无论是船舶稳性方面还是实际操作的安全性,都存在巨大的困难。要解决这些问题,应使用现代计算机软件模拟技术、改造、优化海上生产作业操作程序,使用软件和设备结合的智能操作,减小人工操作步骤,提高工作效率,降低施工成本。
2 船舶吊机的工作原理
船舶吊机由提升装置和回转装置两大部分组成:
2.1 提升装置
吊机提升装置主要由变幅升降和吊钩升降两部分组成:
(1)吊机的变幅升降装置主要由电动机、齿轮箱、制动器、绳筒、钢丝绳和吊臂组成。其工作原理为:由电动机驱动齿轮箱转动带动绳筒转动,通过绳筒转动收紧钢丝绳,吊臂以吊臂转轴为中心向上旋转使吊臂上升;反之齿轮箱输出反转使吊臂下降;如需要在某一位置停止,电动机停止,同时制动器刹住齿轮箱输出上的轮毂停止绳筒转动,吊臂停止在某一个需要的位置。
(2)吊机的吊钩升降装置主要由电动机、齿轮箱,制动器,绳筒,钢丝绳,吊钩组成。其工作原理与变幅升降类似:由电动机驱动齿轮箱转动带动绳筒转动,通过绳筒转动收紧钢丝绳,钢丝绳通过滑轮(组)拉动吊钩直线上升;反之齿轮箱输出反转使吊钩直线下降;如需要在某一位置停止,电动机停止,同时制动器刹住齿轮箱输出上的轮毂而停止绳筒转动,吊钩停止在某一个需要的高度;在上升的顶部高度~500 mm的位置,设定一个吊钩高位报警停止的限位预防吊钩和吊臂发生碰撞事故。
2.2 回转装置
吊机回转装置主要是由安装在吊机筒体的回转齿条与旋转齿轮和旋转电机组成。其工作原理为:通过旋转电机转动驱动旋转齿轮转动,在筒体的回转齿条上作相对运行,使吊机的上部分相对吊机筒体作相对转动而达到吊机的转旋运动;为防止吊机吊臂回转时碰撞到驾驭室,在吊机筒体上安装有2个电子限位和机械限位,以双重保证吊机吊臂在回转工作时不会发生误操作碰撞到驾驭室。
3 吊机操作前的准备工作
船舶上的大型吊机在海上操作时,首先要检查船舶相关舱室是否按要求注入相应的压载水,通过检查计算机软件显示,本船是否达到稳定状态;按《完整稳性计算书》中的压载要求,通过启动总用泵注入或排出压载水来调整压载舱及横倾水舱水量,为船舶在海上达到稳定状态,即为吊机安全工作做好充分的准备。
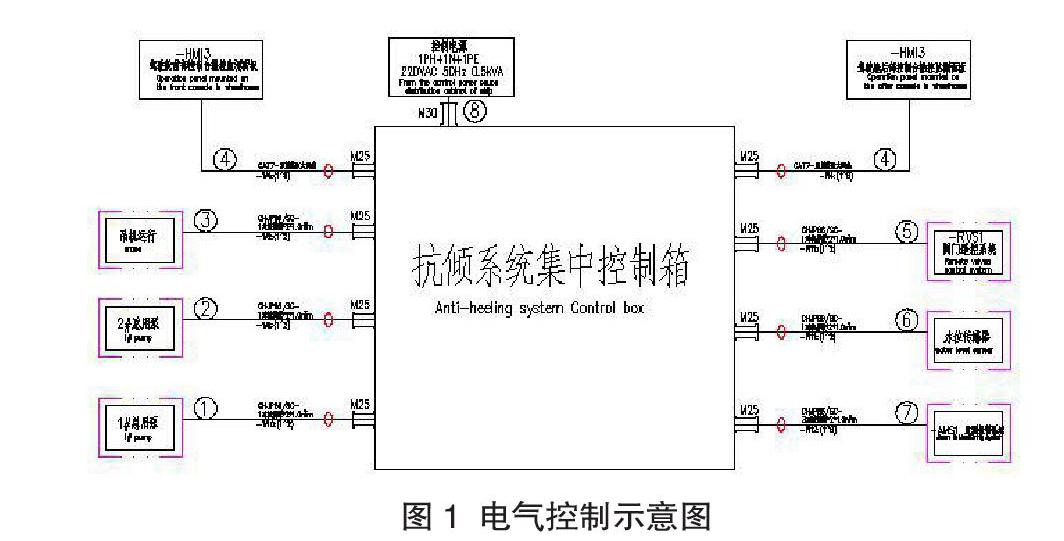
4 抗横倾系统电气控制原理
如图1所示电气控制示意图:船舶的横倾状态是通过安装在船舶首、舯、尾的左右两舷6个水尺位置的水位传感器,由水位传感器检测的数据分别传送到抗倾系统集中控制箱内进行数据分析,软件计算得出船舶横倾角度;并且同步监测船舶左右摇摆的状态和前后吃水状态,通过驾驶室前、后控制台横倾监测系统的显示器显示给操作人员,保证吊机在操作过程中的准确性和安全性。
在操作吊机时,当船舶左或右倾超过2°时,抗倾系统集中控制箱内部通过数据分析后按步骤发出指令:首先打开或关闭指定的左或右舷阀门,阀门打开/关闭信息反馈到抗倾系统集中控制箱后,再发出指令起动1#总用泵,直到船舶左/右倾恢复在0°时,集中控制箱才会发出指令停止1#总用泵,然后发出打开/关闭指定的左/右舷阀门,进行一个闭合操作程序指令;当 1#总用泵已处在运行状态,操作人员继续操作吊机,船舶横倾未能有效控制,船舶左或右倾角度从2°继续向上达到4°时,集中控制箱发出指令起动2#总用泵,同时发出报警信号,提醒吊机操作人员放慢速度或停止操作吊机工作,2台总用泵同时驳运压载水加快恢复船舶平衡状态,当船舶左或右倾角度达到5°时,集中控制箱发出指令停止吊机运行,并发出高频的报警信号,这时将会停止所有吊机操作工作, 2台总用泵同时驳运压载水,当船舶左或右倾度达到4°后才解除吊机操作运行的停止指令,從而保证船舶吊机在海上工作的安全性。
5 抗横倾系统管路控制原理
吊机在正常操作时,所有阀门处于关闭状态,总用泵处于停止状态;当吊机从右舷开始起吊货物船舶向右倾角度超过2°时,数据反馈到集中控制箱,通过内部计算分析后集中控制箱按下列步骤发出指令:第一步:打开左/右舷7号、左/右舷6号、左/右舷4号压载水舱的电动阀;第二步:打开NO.1总用泵前后的电动阀;第三步,操作转换阀门,全部阀门的打开和关闭信息状态反馈集中控制箱处理后,再发出指令起动NO.1总用泵。这时右舷的NO.4(S), NO.6(S), NO.7(S)压载舱的压载水通过NO.1总用泵驳运,经过两边相联的管路和阀门到达左舷的NO.4(P)、 NO.6(P)、 NO.7(P)压载舱,通过驳运压载水来调整船舶向反方向左倾;当左舷的NO.4(P)、 NO.6(P)、 NO.7(P)压载舱的压载水达到一定量时,船舶才会回到原来的平衡0°状态;当吊机旋转操作速度过快或者起吊货物较重使船舶向右横倾达到4°时,集中控制箱收集数据后通过内部计算分析,(下转第页) (上接第页)
发出打开NO.2总用泵前后的电动阀指令,阀门打开信息反馈集中控制箱后发出指令起动NO.2总用泵加快驳运速度,此时NO.1和NO.2两台总用泵同时间工作,加快恢复船舶的向左方向平衡,直到船舶平衡度达到0~0.5°才会停止运转两台总用泵;当船舶向左横倾时操作类似,只是反向操作转换电动阀门。
6 结束语
船舶抗倾系统在潜水器设备吊放过程中也有使用,以确保设备吊放和工作过程中的平稳性。德国安联保险2012年发布的报告指出,75%~96%的海上事故是人为错误的结果。因此,在智能化水平足够的基础上,简化操作能够有效提高海上工作的安全水平,减少事故发生。
参考文献
[1]中国船级社.钢质海船入级规范[S]. 2015.
[2]美国船级社.90 m以下钢质海规[S]. 2013.
[3]船舶设计实用手册(轮机分册)[M]. 1999.
猜你喜欢
中国典型病例大全(2022年12期)2022-05-13
中国药学药品知识仓库(2022年5期)2022-04-11
交通科技与管理(2021年13期)2021-09-10
中国品牌(2021年6期)2021-08-06
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科技视界(2020年17期)2020-07-30
福建基础教育研究(2019年3期)2019-05-28
福建基础教育研究(2019年11期)2019-05-28
汽车之友(2017年1期)2017-03-17
