基于模糊状态观测器的燃气轮机转速传感器故障检测研究
2019-09-21 08:44:46朱嵘嘉
传感技术学报 2019年8期
赵 骏,朱嵘嘉,陈 鹏
(第七○三所无锡分部,江苏 无锡 214151)
转速传感器是燃气轮机控制系统的重要参数输入端。由于燃气轮机转速传感器的工作环境存在高温、盐雾、油雾等恶劣因素,导致其成为控制系统中最容易出现故障的环节之一[1-3]。错误的转速信号如能及时检测,则可利用备份传感器或重构控制律来确保系统继续运行,否则极易使控制系统执行降工况、停机等保护动作。因此,及时准确的检测出故障具有重要工程意义。
燃气轮机在正常运行时,源于进口空气温度、压力、燃油调节阀前的压力波动和负载等因素的不同,即使在相同工况下,其转速最高值和最低值也可相差总量程的1%~2%。另一方面,水雾、油雾、灰尘、及含钠、硫、钒等杂质的燃料燃烧产生的腐蚀和老化,也会导致转速测量值逐渐偏离初始范围[4]。转速传感器故障诊断不仅要迅速、准确,更要将真实故障和上述燃机的特性变化及扰动识别开来。
目前,传感器故障检测方法较多,基于模型解析的故障检测法由于硬件结构简单,成本低等优点受到了广泛关注,但由于需要精确的对象模型,使其面对非线性系统和具有不确定扰动的系统变得难以处理。例如,基于Kalman滤波算法[5-7]解决多传感器故障的检测,但对模型的线性化处理不可避免的降低了检测准确度,文[8]将检测范围减少至某一工况区间,以此减少模型不确定性的影响,却限制了故障检测算法的适用范围。
本文将模型参考自适应与模糊理论相结合,提出了稳定的非线性转速状态观测器的设计方法,解决了传统模型观测器在低转速或模型不精确时易产生的误差累计和观测偏移的问题,并根据转速故障规律,在决策阶段设计自适应阀值,提高了故障检测的鲁棒性,避免了燃气轮机本身特性变化及扰动对故障检测的影响。仿真结果表明该方法能高精度跟踪传感器输出,及时准确地进行转速传感器故障诊断。
1 燃气轮机动态模型
根据燃气轮机工作所遵循的气动热力学定律,忽略燃机热效应,建立如下非线性模型[9]来表示实际燃气轮机运行状态:

(1)
式中:u为系统输入,表示燃油流量,x=[NhNp]T为系统可测状态量,Nh、Np分别表示燃气轮机高压压气机转速及动力涡轮转速相对于设计点的偏差量;f(x)为未知非线性光滑函数,且f(0)=0;y与x同维,为系统输出向量;M(t)为未知有界故障函数;A、B、C、D为已知适当维数可观矩阵。
根据燃气轮机原理可知,虽然进口空气温度、压力和进排气损失均会对燃气轮机转速值产生影响,但在一段时间区间内,可以视上述因素的影响基本不变,即在稳态工况下,可用燃油流量映射燃机转速。
针对燃气轮机转速传感器故障,我们可作如下假设:
①M(t)为有界故障向量,存在常数Γ1∈R,使得以下不等式满足:
‖M(t)‖≤Γ1‖x(t)‖
(2)
②u(t)为有界系统输入量,存在常数Γ2∈R,使得以下不等式满足:
‖u(t)‖≤Γ2‖x(t)‖
(3)
③f(x)为系统非线性函数,且存在已知常数θt和θt,使得以下不等式满足:

对于系统(1)中的不确定部分f(x),利用模糊逻辑系统来尽可能跟踪非线性函数输出。已经证明,模糊函数可逼近任意有界连续的非线性函数[10],对于在紧集Ω上的函数f(x),给定任意正数ε>0,存在模糊函数ξ(x|w)=wTG(x)和最优权重向量w*,满足
supx∈Ω|f(x)-ξ(x|w*)|<ε
(4)

式中:Ci=[c1,c2,…,cn]T与x同维,为中心向量;σi为高斯函数的宽度。
在以上讨论中,本文未要求式(4)中的ε为任意小,这样做是因为实际中要找到满足逼近非线性函数至任意小的模糊系统是比较困难的,通常,定义逼近误差ε比观测器的跟踪精度高一个数量级即可。
2 状态观测器设计
首先,针对系统(1)利用对等空间法建立非线性状态观测器,观测器结构如下图1所示。利用模糊函数输出逼近非线性函数f(·),当系统无故障M(t)=0,给出观测器形式为:

(5)


(6)
定义模糊最优权重向量w*,及最小逼近误差ω,则有
(7)
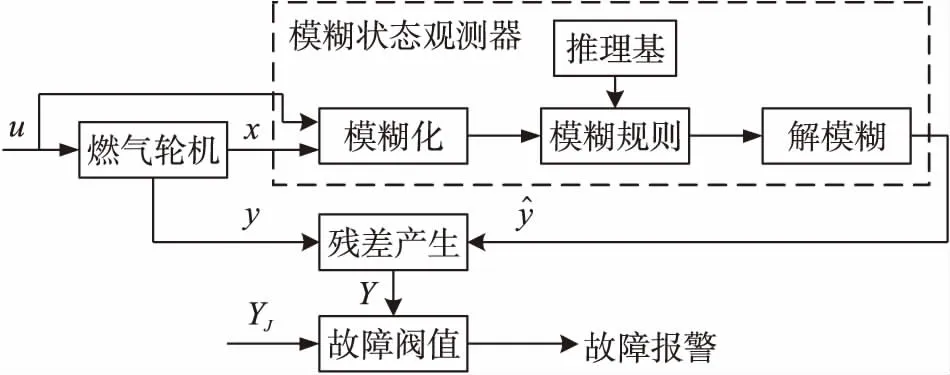
图1 模糊状态观测器结构图
由模糊函数ξ(x|w)的定义,将式(7)代入式(6)得,
(8)
通过对模糊状态观测器的稳定性进行分析,给出以下结论。
定理1对于给定的非线性系统(1)及模糊状态观测器(5),如存在标量Z>0和对称阵Ψ>0,在使得如下代数Riccati方程[11]
(9)


(A-LC)TP+P(A-LC)+Ψ+ZI=0
由于Z>0,则有,
(A-LC)TP+P(A-LC)+Ψ<0
(10)
给定如下形式Lyapunov函数
V=eTPe+Γ(w-w*)T(w-w*)
对Lyapunov函数求导,代入式(6)得
eT[(A-LC)TP+P(A-LC)]e+
(11)
则,有
(12)



则误差方程形式为:

(13)
由式(1)和式(13)组成增广系统
式中:
引理1对任意给定的合适维数的实矩阵Σ1,Σ2,存在δ∈R,下述不等式成立
选择Lyapunov函数
式中:P1为已知正定对称阵。函数V的全导数为
给定Λ=[0I],由假设1和引理1可得,存在δ1∈R
由假设3和微分中值定理,可得|f(x)|≤θt|x(t)|,其中θt=max{|θt|,|θt||t=1,2,…,n},由此
|F(x)|=|f(x)+D-1M(t)|≤θt|x(t)|+
Γ1D-1|x(t)|=Γ3|x(t)|
式中:Γ3=θtI+Γ1D-1。则可得,存在δ2∈R
又由假设3可知,对于给定的ΔS有界,所以有

(14)

如上文所述,状态观测器基于燃气轮机非线性模型建立,而燃气轮机长时间运行所产生的部件磨损、侵蚀和老化,均会引起机组转速和燃油量的对应关系产生变化,增加模型误差。根据实际运行经验,一般运行3 000 h,需根据实际数据对非线性模型进行修正。
3 自适应阀值设计
(15)
实际中,由于船用燃气轮机转速传感器安装在高温、油雾和盐雾腐蚀的环境,所以通常采用环境适应性强的磁电式传感器。其特性表现为,低转速时,信号强度较弱,在燃气轮机起动初期甚至存在一定的采样不稳定区间;随着转速的上升,信号强度和稳定性会逐渐增加,高转速时,正常转速信号的波动反而相对减小。同时,由于转速齿轮加工误差以及传输线路信号干扰的影响,转速信号在在正常情况下也存在小幅波动。
另一方面,由于未建模因素影响,观测器估计值与实际测量值的残差在转速信号稳定且无故障时也不为零,而且在燃气轮机加速或减速的动态情况下,模型不可避免会存在一定的跟踪时滞。因此,采用传统的固定阀值[12]的检测方法,不仅阀值参数难以确定,还易出现错检和漏检的情况。
综上所述,本文提出一种基于知识库的阀值自适应设计方法,根据获取的转速值,自适应调整阀值范围,在低转速和加减速过程中,阀值的设定相对较大,以避免由于信号扰动而发生误判,而转速进入稳定区间后,故障阀值设定应该相对减少。
给定自适应调整公式为:

式中:xmax为最大转速值;α1和α2为对应调节系数,根据燃机起动过程及加速或减速时,转速波动的实际情况进行修正。zg0为理想条件下的基准阀值,可根据传感器和转速采集模块的采样误差进行定义,取5倍~8倍的采样误差。zg1为自适应调整部分,主要目的是克服低转速扰动区的不确定性和削弱跟踪时滞的波动影响。

图2 起动时估计相对差曲线(转速传感器正常)
4 仿真验证
利用某三轴燃气轮机模型[13]来代替实际未知被控对象,不考虑干扰影响,以高压压气机转速和动力涡轮转速为状态变量,对模型进行归一化处理,可得参数表达式如下:
(16)

选取高压压气机转速传感器常发生的典型故障,图3为燃气轮机起动过程中,在第3 s发生转速传感器信号恒减损故障。图5为运行时,在第30 s~40 s,发生传感器短路故障。
通过高压转速估计相对差曲线(图4)可以看出,在燃气轮机起动初期,在低转速时,正常的转速传感器输出信号存在波动,估计相对差较大,10 s以后相对差迅速减少,20 s后趋于稳定,自适应故障阀值的设置有效的避免了初始情况的故障误报。30 s时刻,发生转速传感器信号减损故障时,估计相对差即发生变化。

图3 传感器恒减损故障曲线

图4 恒减损故障估计相对差曲线
通过图6可知,在稳定工况运行时,自适应阀值基本稳定在0.1附近,在30 s~40 s,发生传感器短路故障时,估计相对差远远大于阀值,快速检查到故障的发生。
同时,将提出的基于模糊状态观测器故障检测方法和传统基于扩展卡尔曼滤波器的方法对诊断正确率进行比较,在相同样本情况下,选取稳态下传感器恒减损故障(故障1)和短路故障(故障2)以及起动中传感器恒减损故障(故障3)和短路故障(故障4)共4组故障数据进行仿真,结果如图7所示。
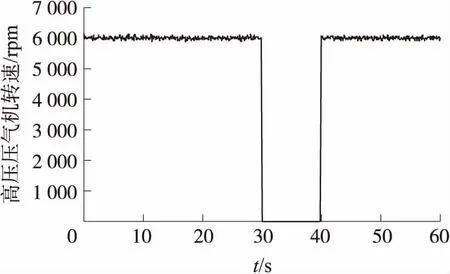
图5 传感器短路故障曲线

图6 短路故障估计相对差曲线
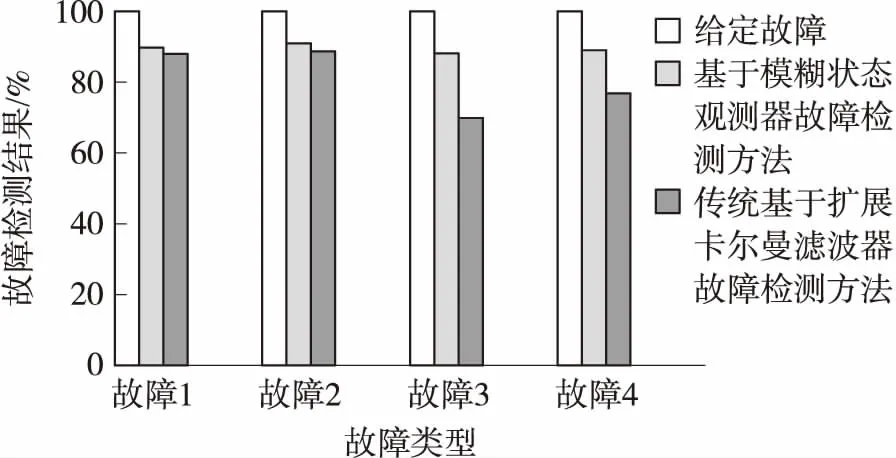
图7 两种故障检测方法故障识别率对比
由图7可得,稳态情况下,两种故障检测方法对燃气轮机转速传感器故障检测的识别率相近,均在85%以上。但在起动过程中,基于模糊状态观测器故障检测方法较基于扩展卡尔曼滤波器的方法具有更高的准确率。
5 结论
本文利用模糊理论建立非线性转速状态观测器,并根据转速故障规律,提出了自适应阀值的设计方法,解决了传统模型观测器在低转速或模型不精确时易产生的误差累计和观测偏移的问题,通过转速估计相对差和故障阀值的比较,能准确快速的检测传感器故障,避免了燃气轮机本身特性变化及扰动对故障检测的影响。试验结果证明,该方法能实时准确地检测传感器故障,且在动态过程中,较基于扩展卡尔曼滤波器的方法有更高的准确率。
猜你喜欢
今日农业(2022年3期)2022-11-16 13:13:50
金桥(2021年10期)2021-11-05 07:23:26
今日农业(2021年12期)2021-10-14 07:30:26
传感器世界(2019年6期)2019-09-17 08:03:20
西部交通科技(2018年2期)2018-06-14 13:22:40
北京航空航天大学学报(2017年5期)2017-11-23 05:53:59
工业设计(2016年11期)2016-04-16 02:45:02
电脑知识与技术(2015年24期)2015-11-17 12:25:43
燃气轮机技术(2014年4期)2014-04-16 03:54:07
燃气轮机技术(2014年4期)2014-04-16 03:54:04