
全向感知型传感器覆盖率优化研究
2019-09-20 00:39
测控技术 2019年5期
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
目前在桥梁等结构复杂的大型工程结构中,健康监测系统的应用非常广泛,在结构上布置的传感器能够实现监测的持续性,能够得到真实运行状态下的响应,并对监测信息反演结构的形态进行有效的利用,通过维修养护计划的制定来保证安全的结构运行[1-2]。传感器布设系统在结构健康监测系统中发挥着非常重要的作用,监测结果在很大程度上受到传感器数量、位置以及类型的影响,在健康监测系统中传感器的优化布置是非常关键的组成部分。
在结构健康监测系统中,传感器系统的作用是非常重要的。整个健康监测系统的功能会受到传感器信号质量以及分布的影响。但是在现场安装以及经济因素的影响下,在结构上只能安装数目有限的传感器[3-4]。所以越来越多的学者开始致力于研究如何利用有限的传感器来保证所获得的信息更大化,并开始致力于研究如何优化布置传感器[5-6]。
目前传感器布置优化研究的重点是针对用于结构振动情况监测的加速度传感器进行优化[7-8],对用于静力学监测的应变传感器的优化布置问题研究较少。因此本文针对全向感知型应变传感器,进行传感器覆盖率的节点布置优化研究。
1 全向感知模型与覆盖率优化问题描述
1.1 全向感知传感器模型
圆盘感知模型是指全向感知模型,大型结构监测中的应变传感器大多属于这种全向感知型传感器。全向感知传感器模型如图1所示。
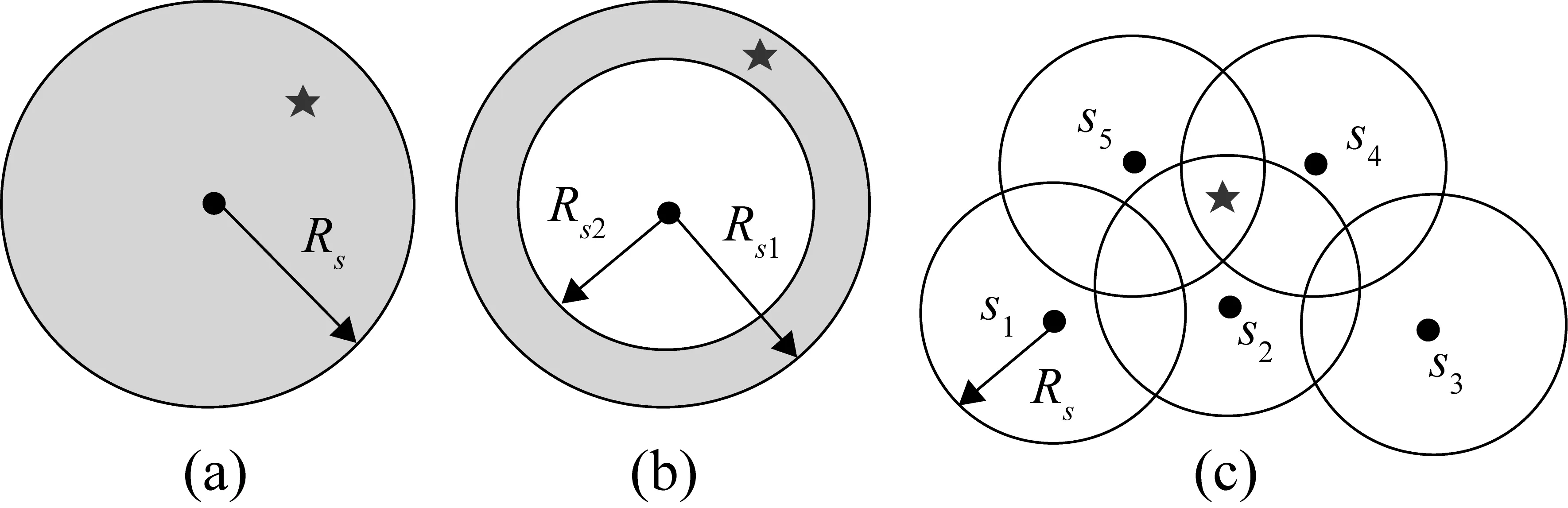
图1 全向感知传感器模型
图1中圆形区域的圆心表示传感器节点,圆形区域的半径Rs表示传感器的感知半径。d(s,z)在覆盖模型中表示节点s到空间任一点z的距离。被覆盖的条件表示为[9]
(1)
从图1(b)中可以看出节点在大型传感器网络中的感知半径是不同的。当节点半径为Rs1时就无法感知到图中的星星,当节点半径为Rs2时就可以感知到图中的星形符号代表的目标。这种部署方式提供了很多便利,此时就可以根据需要去选择节点的感知半径。
另一方面,图1(c)的这种情况在大型传感器网络中也会出现,即若干个节点可能会感知到同一个目标。这里进行如下的定义:当同一个目标被多个节点感知到时(假设传感器节点数量为k),产生了k重覆盖[10],其定义为
(2)
式中,f(di)为感知函数。图1(c)所示为k重覆盖,s2、s4和s5感知同一个目标。
1.2 覆盖率优化问题描述
以保证覆盖率最大为前提,对全向感知型传感器的覆盖率进行优化,并保证所选取的覆盖集数量最少。定义子集S′⊂S,覆盖率优化算法研究的决策者需要对如下两个覆盖目标进行重点关注。
目标1——保证最大的覆盖率:
(3)
目标2——子集S′中具有最少数量的全向感知型传感器节点:
(4)
式中,|S′|为处于工作状态的全向感知型传感器节点数量;|S|为结构健康监测中部署的全部全向感知型传感器节点数量[11]。
适应度值与生物学中物种的生存能力具有相同的意义,根据求解目标式来选取适应度,总的目标函数定义可以根据加权法得到,这里为两个目标函数的加权和,计算公式为
maxf=ω1f1+ω2f2
(5)
式中,ω1和ω2分别为各子目标函数的权重,通过对传感器网络的综合性能要求,决策者就可以进行定义,两个权重之和等于1。解的质量随着总体目标函数值的增大逐渐提升。
2 覆盖率优化算法
人们根据动物的行为研究出了人工鱼群算法,这种群体智能优化算法具有非常明显的优势。在求解空间中得到最优解这类问题可由人工鱼群算法实现[8]。因此,使用人工鱼群算法进行全向感知型传感器覆盖率的优化研究。
定义觅食行为是第i条人工鱼的目前状态为Xi,visual表示其视野范围,其中移动步长为step,在该鱼视野范围内随意选择一个状态Xj[9]:
Xj=Xi+visual×rand()
(6)
随机行为是指在视野范围内令第i条人工鱼向随机选择的一个状态移动:
(7)
聚集行为是指在视野范围内使第i条人工鱼对领域范围内的其他人工鱼的数量nf进行搜寻,同时还要搜寻其中心的位置Xc,并且Xc的解是Yc,这里将拥挤因子设定为δ,当满足Ycnf<δYi的条件时,说明第i条人工鱼会向其他人工鱼的中心的位置Xc移动:
(8)
鱼群的追尾行为是指在视野范围内第i条人工鱼会对具有最优解的人工鱼进行搜寻,当满足Ycnf<δYi的条件时,说明第i条人工鱼会移动向该伙伴Xj:
(9)
通过比较随机、追尾、聚群和觅食这四种行为,人工鱼群的移动方法能够保证获得最优解,如果解满足最优解或者迭代次数满足设定值,则人工鱼群算法就会结束。
全局人工鱼群算法将全局最优信息引入到人工鱼的位置更新方法中,进而提高了人工鱼群算法的全局搜索能力。在人工鱼进行觅食、聚群、追尾这三种行为的移动方向上加入全局最优信息Xbest_af,具体描述如下:
(10)
通过对这种全局人工鱼群算法进行应用就能够保证全局最优解获取的准确度和效率,避免了采用常规算法在人工与更新位置时没有全局信息的问题,以及局部信息造成精度低和收敛速度慢等问题[10]。
3 覆盖率优化实例分析
以3000 mm×3000 mm正方形薄板应变测试传感器覆盖率优化为例,对所研究的全向感知型传感器覆盖率优化方法进行仿真研究。人工随机布置传感器如图2所示。

图2 初始的无线传感节点分布
通过增加传感器节点,并利用本文研究的全向感知型传感器覆盖率优化方法得到的传感器节点数量与覆盖率关系如图3所示。
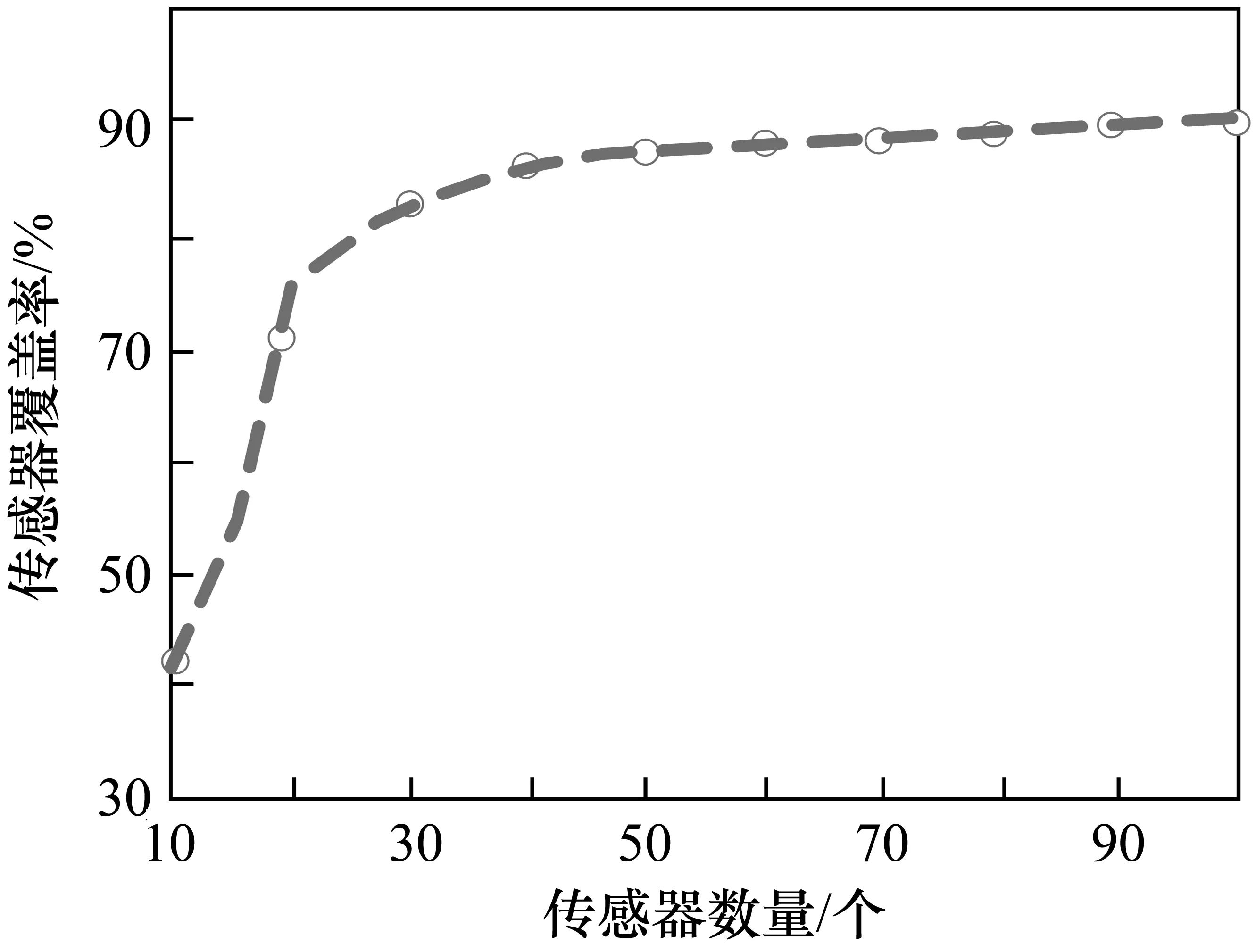
图3 传感器节点优化
结果表明,在传感器节点数量较少时,使用优化方法得到的覆盖率提升较为明显,随着节点数量的增多,使用优化方法得到的覆盖率曲线逐渐平缓。
使用所研究的全向感知型传感器覆盖率优化的传感器布置结果进行薄钢板载荷响应实验,同时与使用人工随机布置传感器的方式进行对比分析。该薄钢板由4个支撑点支撑,在钢板表面固定应变传感器。钢板尺寸为3000 mm×3000 mm×10 mm,钢板的密度为7800 kg/m3,弹性模量为2.1×1011Pa,泊松比为0.3。钢板施加激励信号的频率为200 kHz,幅值为10 V。可得钢板的实际应变如图4所示。人工随机布置传感器的钢板的应变测量情况如图5所示。优化后布置传感器的钢板的应变测量情况如图6所示。

图4 四点支撑薄钢板的实际应变
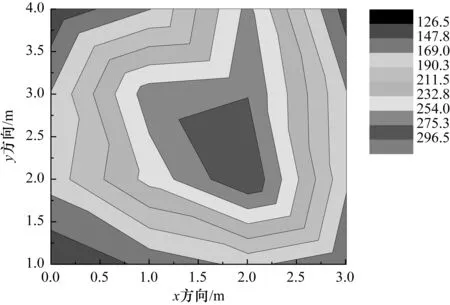
图5 人工随机布置传感器得钢板的应变

图6 优化后布置传感器得钢板的应变
对比各传感器节点的测量误差如表1和表2所示。

表1 优化前的传感器测量误差

表2 优化后的传感器测量误差
使用所研究的全向感知型传感器覆盖率优化的传感器布置后测量的应变误差百分比最大值为7.920%,误差平均百分比为4.06%。人工随机布置传感器测量的应变误差百分比最大值为27.225%,误差平均百分比为15.86%。
通过使用所研究的全向感知型传感器覆盖率优化的传感器布置后,测量的应变相比人工随机布置传感器测量值更接近真实值,具有较高的测量精度。
4 结论
针对全向感知传感器,进行传感器覆盖率的节点布置优化研究,研究结果表明:
① 在传感器节点数量较少时,使用优化方法得到的覆盖率提升较为明显,随着节点数量的增多,使用优化方法得到的覆盖率曲线逐渐平缓。
② 使用所研究的全向感知型传感器覆盖率优化的传感器布置后,测量的应变相比人工随机布置传感器测量值更接近真实值,具有较高的测量精度。
猜你喜欢
军事文摘(2022年8期)2022-11-03
今日农业(2022年15期)2022-09-20
今日农业(2021年21期)2021-11-26
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
电子制作(2019年23期)2019-02-23
价值工程(2018年3期)2018-01-23
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
中华老年口腔医学杂志(2016年1期)2017-01-15
