
运行列车制动参数远程同步监测系统
2019-09-19 07:33
测控技术 2019年6期
(1.中国铁道科学研究院 研究生部,北京 100081; 2.同济大学 铁道与城市轨道交通研究院,上海 200092)
随着我国经济社会的快速发展,城市的规模逐渐扩大,城市轨道交通的重要性更加凸显。地铁作为城市轨道交通中运量最大的交通方式,每天承担着繁重的运输任务,极易发生因疲劳引发的设备故障与安全隐患。为了保证地铁的安全运营,地铁车辆需要在每天夜间进行人工检查,尤其是关键部位(见图1);人工检查很难发现潜在的安全隐患,极易造成疏漏,且效率低[1]。
以制动系统为例,由于地铁列车站间距短、车站多、制动频繁,热负荷的反复作用极易导致摩擦副的损坏与车轮踏面热裂纹的产生,这类裂纹在发展初期很难通过检查发现,却严重威胁着行车安全;此外,制动系统中的风缸或阀门,由于运行过程中振动、老化等原因,发生泄漏或堵塞,可能导致制动缸压力异常变化,威胁行车安全[2]。通过监测摩擦副温度、制动缸压力等地铁列车制动系统关键参数的异常变化,可以及时发现并更换已经出现问题的部件。

图1 地铁列车停运后的夜间例行安全检查现场
针对上述问题,可以借鉴民航客机中 “黑匣子”的设计理念,为地铁车辆制动系统设计一套跟踪监测系统,配备远程同步跟踪监测功能,长时间无人值守地连续采集并存储与安全相关的关键运行参数。这样,既可以及时发现车辆运行过程中关键参数的异常变化,以便采取紧急措施,也可以通过分析历史数据,找出关键参数的变化与列车故障之间的关系,为地铁车辆可能出现的安全隐患提出预警,具有重要的现实意义[3-4]。
本文拟设计的运行列车制动系统关键参数远程同步监测系统,将结合RS485总线技术、GPRS远程通信技术、虚拟仪器技术等[5-6],具有以下功能:
① 现场跟踪监测系统自成体系,可实现系统上电自动运行,长时间无人值守地连续数据采集与存储,且留有充足的对外数据交流接口;
② 工程技术人员可通过个人PC,在现场与跟踪监测系统相连,获取其实时采集数据,或拷贝其存储的历史数据文件;
③ 现场跟踪监测系统可利用基于GPRS网络的数据传输单元(DTU),通过Internet将关键数据发送给位于监控室的远程同步跟踪监测系统。
1 现场跟踪监测系统设计
1.1 现场跟踪监测系统的总线结构
现场跟踪监测系统的本质,是基于现场总线技术的数字/模拟量采集系统,现场总线作为近年来迅速发展起来的一种工业数据总线,由于其具有简单可靠、经济实用等一系列优点,得到了广泛的应用,目前已经产生了如CAN、RS485等各类总线标准。
不同的总线标准有不同的技术特点,适用于不同的应用场合,表1给出了目前常用的低传输速率不同类型现场总线之间的关键参数对比。
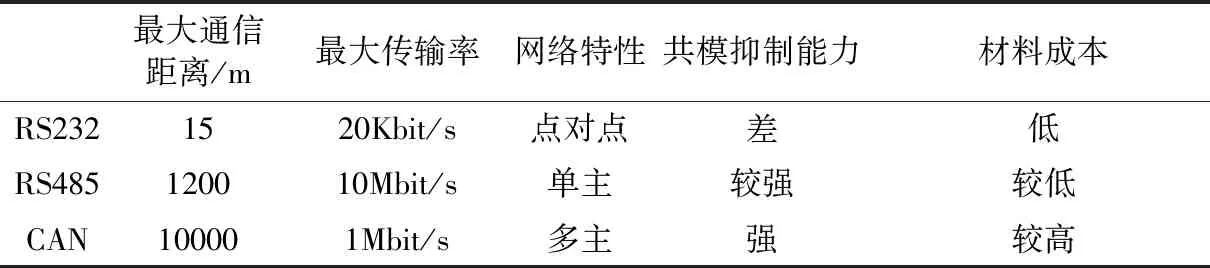
表1 不同类型现场总线关键参数对比
根据系统的设计要求,现场跟踪监测系统需满足只设置一个“黑匣子”(主机)、同时采集多个数字/模拟量数据的基本要求。RS485总线优于RS232总线;与CAN总线相比,RS485总线的主从通信方式更符合跟踪监测系统的要求,考虑到RS485总线技术成熟且成本不高,故基于RS485总线构建现场跟踪监测系统是最为经济合理的选择。系统的硬件结构如图2所示。

图2 现场跟踪监测系统的硬件结构示意图
RS485总线采用半双工的通信方式,其电气特性采用差分信号负逻辑,即逻辑“0”以两线间的电压差为-(2~6) V表示,逻辑“1”以两线间的电压差为+(2~6) V表示,其较低的接口信号电平不易损坏接口电路的芯片,且可以方便地与TTL电路连接。采用RS485模组进行组网具有以下3点优势[7-8]:
① RS485接口采用平衡驱动器和差分接收器的组合,抑制共模干扰能力强,抗噪声干扰性好;
② RS485组网一般是两线制,在低速短距离无干扰工况下,多采用屏蔽双绞线传输,易于布置;
③ RS485方便用于多点互连,最多允许并联32台驱动器和接收器,方便拓展新节点。
1.2 多路模拟量采集模块的设计
现场跟踪监测系统的模拟量采集采用DAM-3054 16位4路高速模拟量采集模块,该模块可采集±10 V、±5 V、0~10 V、0~5 V的模拟量电压信号或0~20 mA、4~20 mA的模拟量电流信号,采用4路差分信号输入,采样速率单通道可达100 Hz,分辨率可达16-bit,采样精度为±2‰,且内置看门狗设计,抗干扰能力强。
使用该模块可以很方便地构成RS485主从通信网络,对多路模拟量信号进行采集且完成模拟量/数字量转换(A/D转换),主机对采集模块数据寄存器的读取采用标准Modbus通用协议[9-10];信息传输方式为异步方式,起始位1位、数据位8位、停止位1位,空校验;数据传输速率可变,但通常选用9.6 Kbit/s;采集模块将采集到的模拟量线性转换为0~65535的十进制码,然后发送给现场跟踪监测系统主机,主机程序即可根据线性对应关系,计算出采集到的模拟量电压或电流的准确数值,以采集4~20 mA模拟量为例,其计算公式为
(1)
式中,I为现场模拟量的采集值;x为A/D转换后采集模块得到的数值码。
1.3 现场跟踪监测系统的软件功能结构
监测系统主机是整个系统数据采集、存储和远程发送的核心,系统软件部分通常采用专用的虚拟仪器开发语言(LabVIEW)编写而成,并可通过Internet 实现网络扩展功能。
图3为基于LabVIEW编写的现场跟踪监测系统主机的软件功能结构,总程序调用相关库函数及VISA资源,通过RS485串口总线系统对地铁车辆关键运行参数进行采集,将采集到的信号进行滤波,然后通过特定的算法,即可得到实时采集值[11-12]。
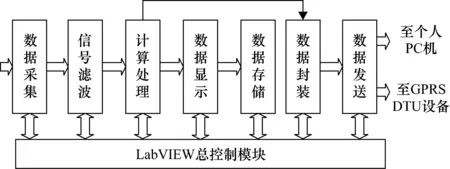
图3 现场跟踪监测系统主机的软件功能结构
为实现工程技术人员通过个人PC与现场跟踪监测系统相连,获取其采集与存储的实时或历史数据,需要将采集到的参数封装后发送给特定的串口,同时将其保存在特定路径的TDMS文件中,供个人PC通过局域网访问下载。此外,系统将采集到的数据封装发送给串口的同时,发送给近旁的GPRS DTU设备,通过Internet将这些数据上传给位于监控室的接收设备,实现关键参数的远程同步跟踪监测。
1.4 数据发送与接收子模块的设计
为实现数据的准确发送与接收,需要对采集到的数据进行封装,数据帧的编码模式如表2所示,由帧头(H)、数据的采集时刻(包含年月日、时分秒)、分隔符(a)、数据值(按顺序进行封装)、帧尾(J)依次组成,封装后通过串口发送给现场个人PC和GPRS DTU设备。个人PC和远程监控系统主机接收到数据后,首先根据帧头、帧尾对接收到的字符串数据进行帧序调整,然后即可根据帧头、帧尾与分隔符提取出所需的采集时刻信息与采集数据,实现数据的显示、分析与存储。

表2 向串口与DTU设备发送的数据帧编码模式
1.5 长时间数据存储子模块的设计
为实现长时间无人值守的数据存储,需要数据存储子模块具备转存功能,防止单个数据文件过大导致历史数据文件下载困难或数据查询困难,此外可以防止跟踪监测系统异常崩溃导致的大量数据丢失。图4为长时间数据存储子模块的程序代码,该模块可实现程序运行过程中数据的自动存储,通过文件/目录信息函数并配合移位寄存器,不断判断当前数据存储文件的大小,当数据存储TDMS文件大于1 Mbits时即重新创建新的数据文件,并以系统当前时间命名。

图4 长时间数据存储子模块的程序代码
1.6 现场跟踪监测系统原理样机开发与测试
为验证现场跟踪监测系统设计方案的可行性,设计并开发了现场跟踪监测系统原理样机,并进行了实验室测试,如图5所示。经验证,该系统运行状态良好,上电自动运行,可实现多路模拟量同时采集、显示与存储;将个人PC连接到系统后,可获取系统的实时采集值,查询并下载存储的历史数据文件;经过长时间拷机运行,无崩溃现象的发生,可实现长时间无人值守地连续数据采集与存储,达到了既定的测试目标。
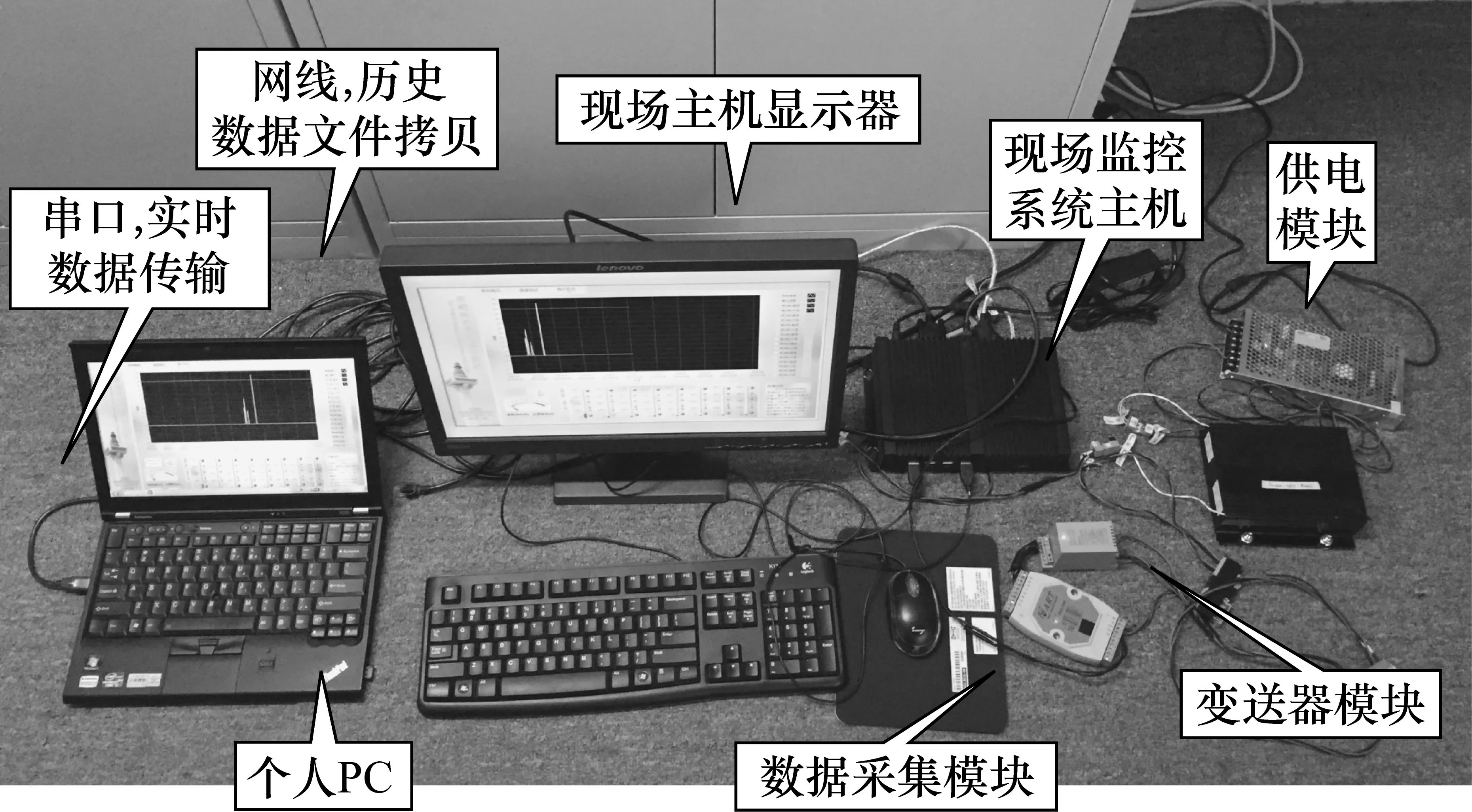
图5 现场跟踪监测系统原理样机的测试现场
此外,为验证数据采集的准确性,应用频率信号发生器与示波器对该原理样机系统进行了数据采集准确性试验,以示波器采集值为频率真实值,通过对比监测系统采集值与真实值发现,在2000 Hz试验量程下,测量偏差不大于7.6 Hz,即该现场跟踪监测系统原理样机的测量误差不大于0.38%,满足跟踪监测系统数据采集准确性的要求。
2 远程同步跟踪监测系统设计
通过在原有系统基础上,增加远程同步跟踪监测功能,可以使技术人员实时监控运行列车制动关键参数,在发生异常的情况下及时采取应对措施,进一步保证列车的行车安全。
2.1 远程同步跟踪监测系统的实现方案
为实现远程同步跟踪监测,需实现数据的远程实时传送,相较双绞线、光纤传输等有线传输方式,基于GPRS网络的数据传输单元(DTU)实现数据的远程无线传输,具有更高的经济性。通过无线通信网络进行传输的DTU具有以下优势[13-14]。
① 可靠性高,实时性强。DTU采用TCP协议通信,避免了数据包丢失的现象,保证数据可靠传输;DTU采用的运营商网络具有实时在线的特性,数据传输时延小,并支持多点同时传输,可以很好地满足系统对数据采集和传输实时性的要求。
② 适用范围广,成本低。运营商网络可以覆盖的地区,DTU设备都可以使用;由于采用运营商的网络,只需安装设备即可构建监测系统,建设成本很低,网络维护的费用也可以省去。
③ 传输容量大,扩容性好。DTU设备能很好地满足传输突发性数据的需要,由于系统采用成熟的TCP/IP通信架构,具备良好的扩展性能,一个监测中心可轻松支持多个现场采集点的通信接入。
综上所述,基于GPRS DTU技术实现远程无线数据传送,适用于运行列车制动参数远程同步监测系统这种低数据传输量的应用情形,且不需要在地铁线路上布置线网,节省了大量系统开销。
2.2 远程同步跟踪监测系统的结构
根据2.1节的实现方案,基于GPRS DTU技术的远程同步跟踪监测系统结构如图6所示。
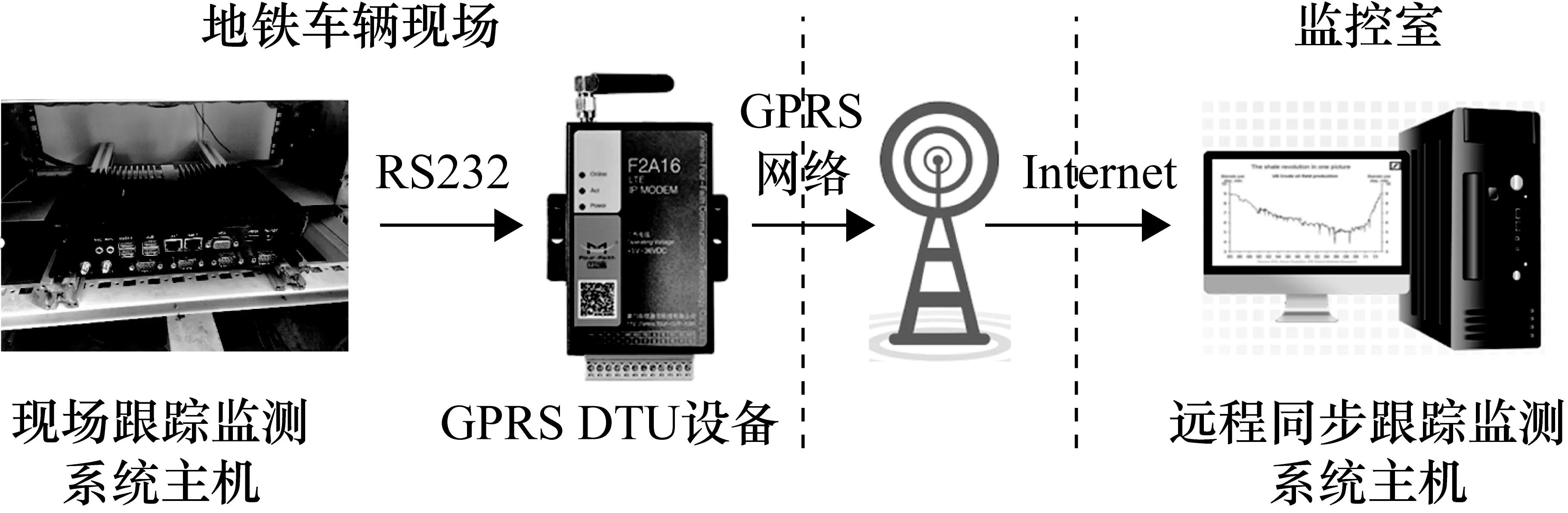
图6 远程同步跟踪监测系统的结构示意图
现场跟踪监测系统将采集到的关键数据在显示、存储的同时,将数据通过RS232串口发送给DTU设备,进入数据传输单元后,数据被GPRS模块封装成适合网络通信的数据包,发送至GPRS网络,通过GPRS网络进入Internet上传输,最后被指定IP地址的远程同步跟踪监测系统读取。监测系统接收到数据后,即可通过LabVIEW软件进行读取、显示与存储。
2.3 GPRS DTU与主机虚拟串口配置
在使用GPRS DTU设备前需要对设备与远程监控系统主机进行设置,设置内容包括:数据中心域名与IP、端口、网络服务APN名称、GPS信息上报间隔时间等。为保证数据传输的稳定性,采用固定IP方式将DTU设备接入数据中心。DTU设备配置完成后即可通过串口线接入现场监测系统,远程监控系统主机则通过虚拟串口的配置与DTU设备形成对应的连接端口,如图7所示。基于LabVIEW开发的远程监控总程序通过VISA函数调用该虚拟串口,完成与现场监控系统的数据交换[15]。
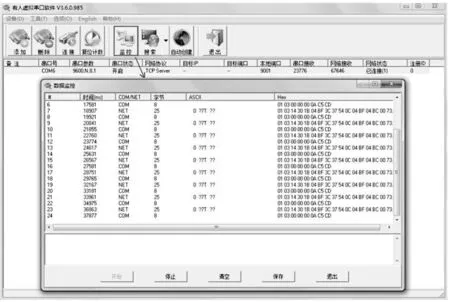
图7 主机虚拟串口配置后的监控界面
3 跟踪监测系统的实现
为验证运行列车制动参数远程同步监测系统的设计方案,基于同济大学轨道交通综合试验线列车开发了图8所示的跟踪监测系统。该系统通过热电偶传感器、压力传感器等,将采集到的闸温、制动缸压力及其他关键参数统一转换成4~20 mA的模拟量信号,通过数据采集卡挂接在RS485总线上,发送给图9所示的现场跟踪监测系统主机,进行显示与存储[23-25]。
现场跟踪监测系统主机不仅留有接口,供个人PC连接以获取实时和历史数据,同时将采集到的数据通过GPRS DTU设备上传至互联网,发送给位于监控室的远程同步跟踪监测系统主机,进行显示与存储。图10为监控室主机的软件界面,可显示当前通信状态、系统时间等,并通过数据框和波形图两种方式显示车辆制动摩擦副温度、制动缸压力等制动系统关键参数的变化。
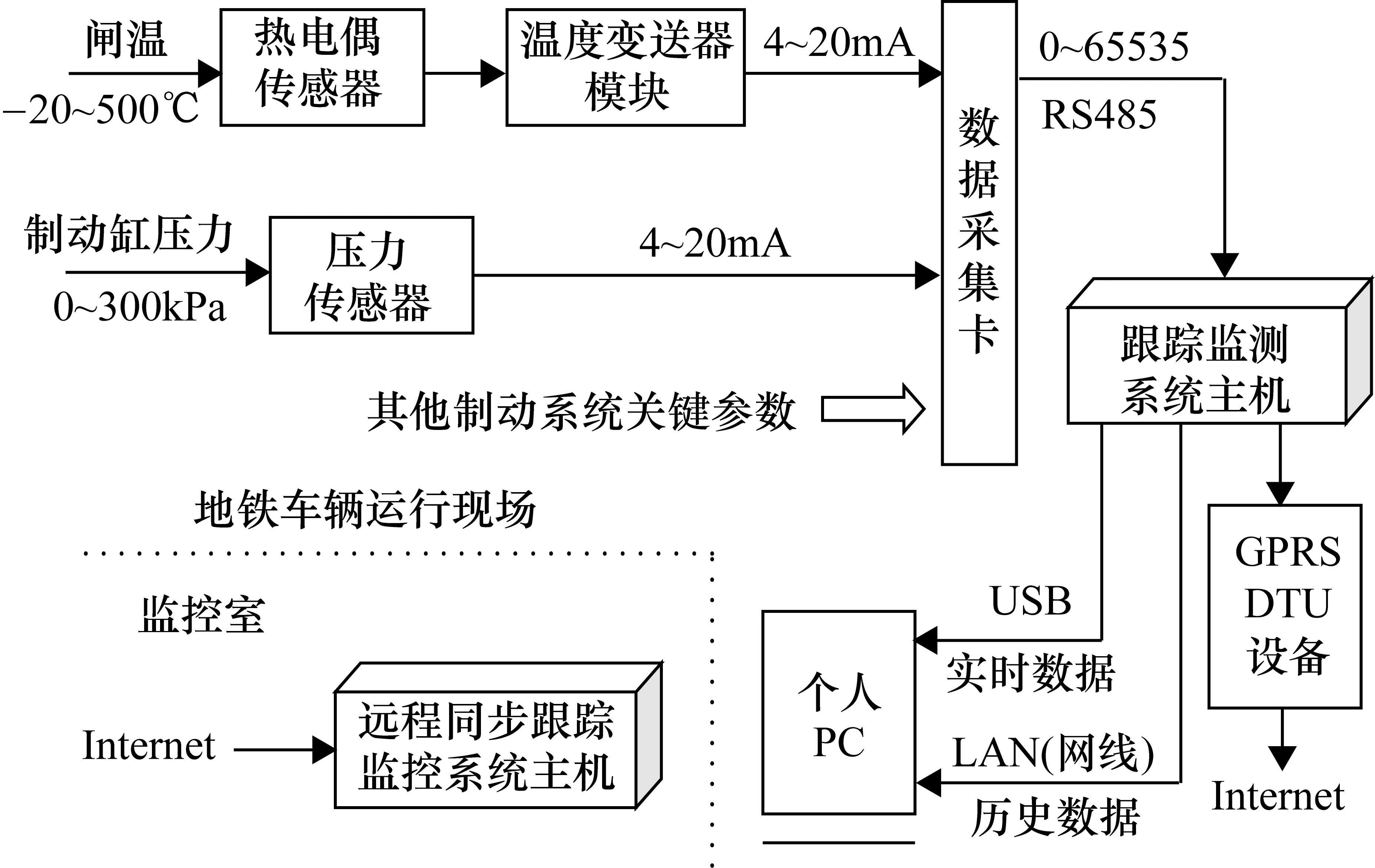
图8 制动系统关键参数跟踪监测系统结构示意图

图9 制动系统现场跟踪监测系统主机显示界面
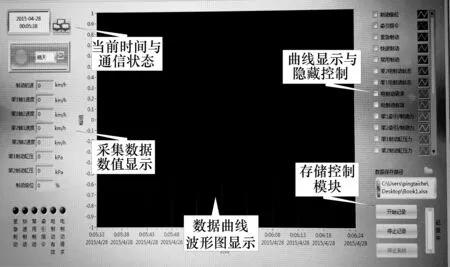
图10 远程同步跟踪监测系统主机主程序界面
通过大量反复的现场试验显示,该系统运行良好,数据采集准确性高,在大数据量情况下存储正常;远程同步跟踪监测系统运行正常,获取的数据与现场数据完全一致,数据传输实时性高,数据准确可靠,极少有掉点现象的发生。图11为根据远程同步跟踪监测系统采集并存储的制动缸压力参数,用Matlab软件绘制的制动缸压力变化曲线。

图11 使用历史数据绘制的制动缸压力曲线
4 结束语
本文应用RS485总线与虚拟仪器技术构建了现场跟踪监测系统,利用GPRS DTU远程无线数据传输单元,可实现运行列车系统关键参数的远程同步跟踪监测功能。该系统可实现运行列车制动系统关键参数,如摩擦副温度、制动缸压力等的长期无人在线跟踪监测与存储,保存的长期历史数据可用于列车服役安全状态评估,或用于分析其与列车故障之间的关系。通过GPRS DTU设备将数据实时传输至远程监控室,可便于地铁工作人员随时掌握地铁列车运营过程中是否正在发生或已发生异常,进而及时采取应对措施,保障列车的安全运行,具有十分重要的实际应用价值。
本文监控系统的设计与实现尽管以制动系统为例,但可推广至其他城市轨道交通系统关键运营参数的长期状态采集与远程同步跟踪监测,进一步保障系统安全。远程跟踪监测除监控室监控外,还可进一步实现分布式远程监控,或利用移动设备实现随时随地的监控,可开发潜力巨大。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
铁道通信信号(2018年12期)2019-01-31
电子制作(2018年11期)2018-08-04
电子制作(2016年21期)2016-05-17
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
铁路通信信号工程技术(2014年5期)2014-02-28
