
骨科机器人手术治疗胸腰椎压缩性骨折
2019-09-17 06:46吴沧陆李展振张海存周瑞
浙江临床医学 2019年8期
吴沧陆 李展振 张海存 周瑞
脊柱骨折由于车祸、高处坠落等高能量损伤,导致骨折发生率逐年升高,其中胸腰椎骨折约占脊柱骨折的50%,是创伤骨科的研究热点[1]。后路椎弓根螺钉内固定术是主要治疗方式,但是传统后路切开复位内固定需剥离腰背肌,创伤大,术后易引起慢性疼痛[2]。此外椎弓根置钉技术参差不齐,置钉位置不准确,导致伤椎复位不理想且容易损伤血管神经。文献报道,徒手置钉法的椎弓根螺钉准确率仅为68.1%,由置钉位置引起的并发症高达16.1%[3]。椎弓根螺钉置钉准确性对手术成功与否至关重要。随着数字化、智能化导航技术的发展,机器人辅助下置入椎弓根螺钉开辟了一种新思路。本研究旨在探索骨科机器人手术治疗胸腰椎压缩性骨折中的临床疗效。
1 资料与方法
1.1 一般资料 自2015年9月至2016年9月将本院收治的84例单纯胸腰椎压缩性骨折患者,按照手术方式分为观察组(42例,骨科机器人手术治疗胸腰椎压缩性骨折)与对照组(42例,传统置钉内固定)。两组患者基本情况、损伤节段、基础疾病等差异均无统计学意义(P>0.05),具有可比性,见表1。纳入标准:均为单纯胸腰椎压缩性骨折;符合椎弓根螺钉内固定的手术指征;年龄18~65岁。排除标准:合并神经损伤;重度骨质疏松患者;椎管占位达到椎管矢状径>30%;存在严重凝血功能障碍;合并严重的系统性疾病。

表1 两组患者基本情况比较(n)
1.2 治疗方法 完善MRI、CT、DR等影像学检查及其他辅助检查,明确骨折及神经损伤程度;嘱患者强制卧床,采用止痛、消肿等对症治疗。全身麻醉,俯卧位。将脊柱示踪器固定于骨折节段临近上位棘突的皮肤表面,无菌保护套膜将骨科机器人臂隔离,安装机器臂上的定位标尺。将机器臂末端的定位标尺定位于伤椎标记点,利用C型臂X线机荧屏透视伤椎及标记点,确定≥4枚标记点在透视视野内,行天玑骨科机器人三维成像扫描,获取手术节段的三维影像。根据三维图像进行手术规划,确定椎弓根螺钉的置入路径、进针点、进针角度,确保螺钉与椎板平行。螺钉应距离椎体前缘骨皮质3~5mm,依据测量的椎弓根直径选择合适的螺钉。按照规划路径,取下机器臂上定位标尺,换上导向器,移动机器臂末端至伤椎边缘,使机器人进行自动微调,直至导向器与预定位置达到0.4mm范围内方可停止。插入钝性工作套筒,切开皮肤及皮下筋膜约1.5cm,将工作套筒直达脊柱骨性部分。再次检测工作套筒实际与规划路径的偏离范围,若处于安全范围内(0.4mm),方可使用电钻依次植入6枚导针(深度30mm)。C型臂X线机荧屏透视导针位置(也可术中再次进行三维扫描),检验导针位置与规划是否一致,确定位置无误。沿导针进行扩孔、开口器开口、丝攻加深,沿导针拧入规划好的椎弓根螺钉至相应深度。依据术前测量后凸角度,从最下枚螺钉长尾槽内进行植入预弯棒并撑开锁紧、螺钉长尾。C型臂X线机行正侧位透视,位置确认无误,冲洗缝合伤口。对照组:全身麻醉,俯卧位。C型臂X线机荧屏透视下确定伤椎位置,画线标识,消毒、铺巾。采用后正中入路,以伤椎为中心做纵行切口,依次切开皮肤、皮下组织、筋膜直达棘突,以撑开器将软组织分向两侧,用电刀和骨剥沿骨膜下将肌肉与椎体后部骨性结构剥离。采用横突定位或人字棘定位法确定椎弓根位置,置入椎弓根钉。安装连杆,撑开复位,锁紧尾帽,充分恢复椎体前缘塌陷高度。大量生理盐水冲洗创腔,放置无菌负压引流管1根另戳孔引出,逐层缝合。所有患者术后预防性应用抗生素48h,引流管和尿管于隔天拔除。术后24h内鼓励患者行腰背肌收缩锻炼。伤口12d拆线,3周后可佩带胸腰椎护具下地行走锻炼,3个月后方可取下护具。
1.3 评价指标 对比两组患者手术时间、术中出血量,CT扫描评价置钉准确率,其中置钉准确率=0级螺钉数量/椎弓根螺钉总数量×100%。CT扫描置钉分级评价方法见表2。记录术后1年、2年Cobb角度,椎体前缘压缩程度及VAS评分情况。矢状面 Cobb 角测量以及计算方法:于患者侧位片分别做伤椎下位椎体下终板线及伤椎上位椎体上终板线的垂线,垂线交角即为 Cobb 角。椎体前缘压缩程度测量方法:于侧位片上分别做上下终版的平行线,测量两线间的垂直距离。VAS 疼痛评分标准如下:无痛,0分;轻微疼痛,1~3分;疼痛感较强且对患者睡眠造成影响,未超出患者耐受度,4~6分;疼痛感强烈且严重影响患者睡眠以及食欲,超出患者耐受度,7~10分。

表2 CT扫描置钉分级评价方法
1.4 统计学方法 采用SPSS 19.0统计软件。计量资料以(x±s)表示,组间比较采取t检验,计数资料组间比较采用χ2检验,P<0.05为差异具有统计学意义。
2 结果
2.1 两组患者围手术期相关指标 见表3。
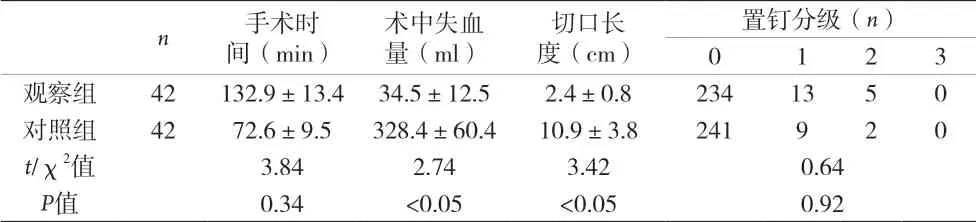
表3 两组患者围手术期相关指标(x±s)
2.2 两组患者术后1年、2年影像学参数变化 见表4。

表4 两组患者术后1年、2年影像学参数变化(x±s)
2.3 两组患者VAS评分及并发症情况 术后1年、2年随访,观察组VAS评分为(3.15±1.14)分、(2.84±0.94)分,与对照组(3.61±1.43)分、(2.79±1.03)分相比,差异均无统计学意义(t=0.67,P=0.31;t=0.47,P=0.52)。两组患者随访期间均未出现断钉、断棒、退钉及螺钉松动等情况。
3 讨论
目前,后路椎弓根螺钉内固定在单纯胸腰椎骨折治疗中已经普遍应用,传统开放内固定手术常需要剥离腰背肌,暴露关节突及椎弓根进针点。有学者认为,椎旁肌肉及脊神经后支损伤可导致背部深层肌肉组织失神经营养,最终出现术后疼痛[4]。传统后入路手术对多裂肌损伤较重,不利于患者早期功能康复,如果能够减少多裂肌的剥离并且保留其位于棘突的起点,则术后瘢痕小,同时可有效减少术后腰背痛的发生率[5]。经皮微创椎弓根螺钉内固定术后患者血清C反应蛋白水平及肌酸激酶活性均高于开放手术。微创椎弓根螺钉内固定治疗胸腰椎骨折操作简便、创伤小、出血少、恢复快、术后疼痛少。
传统经皮微创或者开放手术治疗胸腰椎骨折均通过肌间隙入路进行手术,术中均为徒手置钉,存在置钉准确率差、重复置钉、螺钉长度和粗细无法达到最大量化,伤椎上下椎体椎弓根螺钉置钉与终板不平行等不足。若伤椎置钉未在椎体骨折线处则术中复位不理想,后期存在椎体塌陷率高、后凸畸形成角进一步增大等弊端[6]。有学者指出,伤椎受伤椎体两侧塌陷程度不同,同时伤椎多存在旋转或侧弯,使得伤椎椎弓根路径改变,徒手置钉失误率显著增加。骨科机器人是预先依据三维成像,设计置钉方案达到置钉精准、无重复置钉,精准穿刺,误差在0.1~0.3mm,术中可以实时监测导针偏差参数[7]。有学者指出,骨科机器人理论上可以完美达到伤椎上下椎体椎弓根螺钉置钉与终板平行、允许伤椎置钉于骨折断端(斜置钉)[8]。更重要的是术前即可预判每一枚椎弓根螺钉的规格,即粗细、长度都可以依据三维扫描数据达到个体化、精准化,使置钉的长度达最长、螺纹最粗,把持力最强,后期塌陷率更低,对骨折复位及维持复位的效果最好。最后,导航机器人是定位导航下置入导针,沿导针进行钝性分离肌间隙,到达进针点,对竖脊肌、多裂肌及骨性结构损伤更小,脊柱稳定性更高,术后恢复时间更短,可更早的下地活动。
猜你喜欢
第二军医大学学报(2022年9期)2022-11-18
中国伤残医学(2022年8期)2022-10-15
生物骨科材料与临床研究(2022年4期)2022-08-18
中国典型病例大全(2022年12期)2022-05-13
兵器装备工程学报(2021年12期)2022-01-11
临床骨科杂志(2021年3期)2021-06-24
中华养生保健(2020年4期)2020-11-16
安徽医科大学学报(2020年10期)2020-10-14
保健与生活(2020年1期)2020-05-07
中国伤残医学(2019年12期)2019-12-03
