基于谱残差和梯度纹理融合特征的舰船检测
2019-09-13 06:18:42李庆峰王文胜韩玺钰梁怀丹
液晶与显示 2019年8期
李庆峰,何 斌,王文胜,苏 畅,韩玺钰,梁怀丹
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;
2.中国科学院大学,北京 100049;
3.北京信息科技大学 机电工程学院,北京 100192)
1 引 言
随着科技的快速发展,光学遥感器的图像分辨率有了大幅度提高,人造舰船目标的检测与识别在可见光遥感图像中有着极其重要的意义和研究价值。针对可见光遥感图像中的舰船目标检测任务,一方面,图像分辨率的提高可以获得目标更清晰丰富的形状纹理结构,有更多的数据量来描述目标灰度分布关联性;另一方面目标灰度同质性降低、纹理差别增大、云雾与海浪等干扰给舰船检测带来了新的挑战。如何及时高效地处理高分辨率可见光遥感图像信息,从海量数据中挖掘出有价值的信息,已经成为遥感图像分析与理解、智能视觉等领域研究的热点。舰船作为一类重要的、典型的人造目标检测对象,是用于海上运输的重要载体以及战争时期遭受攻击的重要军事目标。因此,对舰船的检测工作在民用和军事检测与识别领域有广阔的应用前景[1-2]。遥感载荷成像时会受到大气散射、杂散光干扰、云雾遮挡等诸多因素的影响。同时,海面云雾及孤立海岛等其他干扰物也会对海面舰船的成像干扰。因此,如何从复杂的海洋背景中快速、准确地检测和识别出舰船目标仍然是一个难题。
现有的舰船检测方法大多采用“先筛选后确认”的策略:首先通过一些计算量小的舰船特征和检测算法进行目标候选区域提取,从大幅图像中筛选出疑似目标的区域;然后根据舰船与其他干扰物的自身精细特征图像差异(形状、纹理等)对候选区域进行确认,剔除虚警,进行目标的判别确认,实现对舰船目标的识别。例如,在候选区域目标定位和筛选提取阶段,有利用图像灰度统计和边缘信息实现阈值分割[3];也有利用自然背景与人工目标的分析特征差异来进行定位检测[4];亦有利用多层稀疏编码构造图像显著图进行分割,获取候选目标区域[5]。在候选区域目标判别确认阶段,通过设计的复杂特征来描述舰船目标,最后采用机器学习SVM算法进行二分类判别确认。例如文献[3]通过提取形状不变量特征以及层次化描述的简单纹理、多尺度纹理等特征,获得高达679维描述目标特征的向量;文献[6-7]通过构建显著图模型来提取舰船目标的局部二值模式(Local Binary Pattern,LBP)特征来进行分类识别。文献[8-9]使用显著性模型和形状不变量以及梯度特征来实现对舰船目标的检测与识别,其中文献[8]定位算法较为复杂,同时缺乏对舰船目标的内部纹理信息的利用。虽然,以上方法都能取得不错的检测结果,但是存在以下两个问题:受云雾、岛屿等干扰影响,导致候选区域目标的分割易产生虚假目标,分割效果的好坏直接关系到检测精度和算法的时效性。同时,已有算法的特征向量维数较大,在训练分类器、描述目标切片提取特征以及最终分类判别时计算均较为复杂。
针对上述问题,本文提出了一种基于谱残差(Spectral Residual,SR)[10]和梯度纹理融合特征的舰船检测方法。该方法包括:目标在候选区域的粗筛选和定位以及对船舶目标的识别与确认。前半部分采用模拟人的视觉注意机制的谱残差模型结合自适应动态阈值法对海面船舶目标区域进行搜索定位,有效地抑制了海面大面积云层、尾波浪花等的干扰。在后半部分,根据船舶目标的形状和纹理特点,设计了一种实用的结合形状、梯度、纹理3种信息的融合特征。文中梯度方向特征具有较好的旋转和尺度不变性,同时,采用局部与全局纹理信息互补来描述纹理特征,充分利用了舰船目标切片内部的纹理信息。然后,利用AdaBoost分类器对30维的融合特征向量进行分类鉴别,有效地剔除云块和孤岛等虚假目标的干扰,减少了特征向量的维数,降低了计算复杂度。
2 纹理特征
2.1 局部二进制模式
局部二进制模式(LBP)是一种用于图像局部纹理特征描述的经典算子,它的核心思想主要是指设定中心点像素的灰度值的大小为阈值,将其与它3×3邻域灰度值相比较,得到相应的二进制码以此来实现图像局部纹理结构信息的描述[11]。如果相邻像素的灰度值大于或者等于中心点像素灰度值,将该像素的位置标记为1,否则置0。也就是说,按照规定的编码方向对中心像素的八邻域进行二值化,将将二进制序列转化为无符号十进制数作为中心点像素的响应。对整个图像进行处理后,得到一幅LBP响应图像,并利用响应图像的统计柱状图作为LBP特征,用在后续识别工作上。LBP算子的计算公式如下:

(1)
其中,

(2)
式中:P表示P邻域,R表示圆域半径,gc表示局部邻域的中心点像素灰度值,gk(k=0,1,…,P-1)表示3×3邻域范围像素点灰度值。
由于LBP柱状图是单独计算图像的每个分区,对于块区域,标准LBP描述符得到的二进制模式数较大,而块区域中实际像素数相对较少,从而导致柱状图过于稀疏,其并不具备太多的统计意义。为了进一步减少LBP特征模式的特征维度,Ojala等人提出,如果二进制位串被看作一个循环,并且它包含的从1到0或从0到1的跳跃不超过2次,则它是一个统一的模式[11]。除统一化模式外,其它的模式均为非统一化模式。8邻域的LBP算子有58种统一化模式,加1个非统一化模式,共有59种模式。
LBP特征的统一化模式可表示为:

(3)
式中:U表示二进制的序列中两个相邻二进制值之间的0/1(或1/0)变换次数。考虑到舰船目标大小变化范围,本文中邻域P=8,邻域半径R=2,使用双线性插值结果提供对角线四邻域的灰度值。最后,使用Uniform LBP模式直方图统计方差作为特征。
2.2 灰度共生矩阵特征
应用结果表明,通过研究灰度的空间相关特性,灰度共生矩阵(GLCM)能够从方向、间隙、变化范围和速度等方面反映图像的综合信息。它能反应图像亮度的分布特性和亮度相近像素之间的位置分布特性,具有良好的纹理识别效果[12]。
灰度共生矩阵原理是取图像I中的任意一点(x,y)和另一个偏离它的点(x+a,y+b)(其中,a,b为整数,代表偏移量)形成一对点。如果将点对的灰度值设置为(f1,f2),并在整幅图像上移动点(x,y),则将获得不同的(f1,f2)值。如果图像的最大灰度为L,则有L2种f1与f2的组合。对于整个图像,计算每个(f1,f2)值的出现次数,然后将其排列成一个正方形矩阵,再用(f1,f2)的总发生次数归一化为发生概率P(f1,f2),由此产生灰度共生矩阵p(i,j)。HARALICK等人对GLCM定义了14种[13]用于表达纹理的二阶统计量,但这些统计量会重复描述纹理信息[14]。考虑到算法效率,实际应用中需要选择符合目标纹理特性和描述需求的统计量组合描述纹理特征。
通过对舰船目标和非目标的GLCM纹理统计量实验研究表明(图1 (a)和(b)):对比度(Contrast),相关性(Correlation)这两个统计量能够很好地描述舰船图像纹理中灰度基元之间空间联系,反映了纹理信息中灰度分布的性质。取步长为2,对0°,45°,90°,135°方向求统计量,并对上述各方向统计量指标进行归一化,获取描述纹理特征的二阶统计量进行分类。
2.2.1 对比度(反差)
对比度用于测量共生矩阵的值如何分布,以及图像中局部变化的程度。它反映了整幅图像中像素和它相邻像素之间的亮度反差。纹理凹槽越深,对比度越大,效果越清晰。
Contrast=∑i∑j(i-j)2P(i,j).
(4)
2.2.2 相关性(同质性)
利用同质性衡量图像的水平或竖直方向上的灰度共生矩阵元素的相似度,反映图像纹理局部变化,即灰度的局部相关特性。同质性的值越大,表明图像不同区域的纹理变化越小,局部纹理均匀且规则。

(5)
其中:

(6)

(7)

(8)

图1 GLCM特征统计实验结果。(a)对比度;(b)相关性。Fig.1 GLCM feature statistics experiment results.(a)Contrast;(b)Correlation.
(9)
3 形状特征
对于高分辨率可见光遥感图像中的舰船目标而言,舰船的大小因类型不同差别较大,就几何特征而言,有长宽比、面积等均有差别。考虑到形状的适应性,形状特征的设计需要满足对不同分辨率和尺寸不同的舰船具有旋转和尺寸缩放不变性,即不受舰船方向和大小形状特征的描述性能。本文选取的形状特征有:长宽比、紧密度、矩形度。
3.1 紧密度
紧密度要求区域具有光滑边界,根据实际需要及后续融合特征尺度归一化,定义为:

(10)
其中:Perimeter是指目标切片区域边界周长,即像素点的个数。区域为圆形时,Compactness=1;区域边界弯曲越复杂,Compactness值越大。
3.2 矩形度
用区域实际像素数与能包含该区域最大的凸包中的像素数的比值表示矩形度(Rectangularity)。凸包的严格数学定义:在向量空间H中,对于给定的集合X,所有包含X的凸集的交集S被称为X的凸包。
(11)
3.3 长宽比
由于实际分割结果,并非十分规则的长方形,使用区域的等效椭圆的长短轴,长短轴用疑似目标切片区域的标准化二阶中心矩来表示。设二维数字图像f(i,j)的(p+q)阶原点矩定义为:

(12)
中心矩为:

(13)
式中:

(14)
等效椭圆长轴为:

(15)
等效椭圆短轴为:

(16)
则长宽比的定义为:
(16)

4 梯度方向特征
在获得到候选区域的目标切片后,需要对候选区域进行特征设计,以便更精确地进行识别和确认,进一步去除误报区域,获得更准确的检测结果。舰船目标在可见光遥感图像的目标中一般呈对称长条形状,轮廓特征具有共同的形状共性。由于船上两条长边弦对称分布,两侧的梯度方向基本是对称的,且沿垂直主轴方向具有很高的梯度幅值。通过对行人检测方向梯度直方图[15](HOG)特征提取算法的研究,结合舰船自身的固有特点,针对舰船目标设计梯度方向特征,将360°的梯度方向均分为8个统计间隔(bins),如图2(a)所示。该梯度方向设计可以更好地描述舰船的对称性,突出舰船的侧弦,即梯度方向垂直于主轴方向。为了准确鉴别检测目标,剔除疑似舰船目标切片,以及避免舰船尺寸对梯度方向特征的影响。如图2(b)将舰船目标细分为3个统计区块:B1,B2,B3,分别计算B1,B2,B33个统计区块内8个统计间隔的梯度强度的统计特征。
图2(c)是舰船正向和逆向的梯度方向特征直方图,从中可以看出B1,B2,B3统计区块的梯度方向特征直方图总体相似。特别地,1D和5D两个统计间隔对应的梯度方向的直方图高度均远高于其余6个统计间隔内的直方图高度。原因在于舰船目标两条对称的长侧边弦,两边的梯度方向统计量总体上应是相差不多的。同时,旋转后的舰船目标依然保持这一特性,结合图4(a)和(b)可以得出结论,针对舰船目标设计的梯度方向特征具有旋转和尺度不变性。

图2 梯度方向特征示意图Fig.2 Illustration for gradient direction feature
5 谱残差与融合特征的舰船检测
高分辨率可见光遥感图像的前景目标—舰船和背景区域相比尺寸较小,通常目标只占整幅图像很小的一部分。所以,先从整张图像中快速准确的定位舰船潜在的候选目标区域,不仅能够提高在图像中搜索候选目标区域的速度,而且还能降低算法的计算复杂度和检测的虚警率。而人类的视觉注意机制能够快速、准确的从复杂场景中区分出视野中前景目标和背景,定位远方的感兴趣目标位置。所以,本文将模拟人类的视觉注意机制的视觉显著性检测思想引入舰船目标的候选区域提取上来。
目前模拟人类的视觉注意机制的视觉显著性检测[6-7,9]已经成为舰船检测的研究热点,主要分为基于空间域和频率域两类模型[16]。根据本文使用的遥感图像数据特点,引入基于频域分析的谱残差[10](SR)视觉显著性检测模型,结合自适应动态阈值分割技术来提取候选目标区域,能够很好的提取复杂云层干扰下的候选目标区域,降低虚景率,以便后续目标切片的纹理和梯度描述与舰船目标鉴别。
5.1 基于视觉注意机制的谱残差候选区域定位
由于每个目标都有自己与众不同的特性,基于傅里叶变换的SR算法通过寻找背景的通用性来获取目标图像的显著性,与有复杂目标干扰下的海洋舰船目标检测有异曲同工之处。该方法能够有效的解决背景频率特性高于舰船的场景下(如大面积云雾扰动问题)的目标定位问题。本文采取该方法获得疑似目标全局显著图,并将显著图进行三维效果显示,如图3(b)所示。
该算法的实现过程:
(1)将图像I(x)用傅立叶变换到频率域,取幅值的对数后得到对数频率谱L(f):
A(f)=|F[I(x)]|,
(18)
P(f)=φ(F[I(x)]),
(19)
L(f)=log(A(f)),
(20)
式中:F为二维离散傅里叶变换,|.|代表其幅值,φ代表其相位。
(2)用均值滤波器hn(f)对其进行平滑,获取的大致形状即为冗余信息:
V(f)=L(f)hn(f).
(21)
(3)频谱残差就是图像的傅里叶谱和其进行均值滤波后的差:
R(f)=L(f)-V(f).
(22)
(4)对谱残差R(f)和相位P(f)用二维离散傅里叶反变换处理:
(23)
(5)最后,进行高斯模糊滤波重构出一幅图像,获得表示原图像各像素的显著性的显著图(Saliency map)。
图3中以图像平面为xy平面,将像素灰度值作为z轴坐标,将两种场景下的原图与全局显著图,三维立体化显示出来,以更好地观察谱残差模型的变换效果。通过图3(a)和(b)对比可以得出结论,基于频域变换的谱残差模型在云雾干扰情况,尤其是云雾弥漫的场景中的舰船目标候选区域定位有很好的效果,能够准确定位云雾遮掩下的疑似舰船目标区域。
接着,结合自适应动态阈值法对疑似目标显著图进行分割,获得二值化分割图像。它的表达式为:
Tc=m(S)+k×σ(S),
(24)
(25)
式中:S表示显著图,m和k分别为S的均值和方差,k为阈值系数。值得指出的是,系数k的选取根据实际需求而定。为保证检测效果和对虚景的敏感度。本文的经验值k=2。
最后,使用形态学腐蚀、膨胀、孔洞填充来对显著图分割图进行处理,根据舰船目标的形态学面积特征来去除小面积区域,获得疑似目标的形态学滤波结果和定位疑似目标区域,分别如图3(c)和(d)所示。

(a)原图及三维显示(a)Original image and 3D display

(b)全局显著图及三维显示(b)Global saliency map and 3D display

(c)二值化图 (d)候选区域定位 (c)Binary image (d)Localization of the ROI图3 疑似目标定位Fig.3 Suspected target location res
5.2 基于融合特征的舰船目标鉴别
谱残差模型虽然可以抑制薄云层、海雾及尾迹浪花等的干扰影响,但仍可能检测到厚云层,岛屿等干扰物。在获取候选区域目标切片后,需根据能区别舰船与干扰物的有效特征对候选区域目标切片进行判别确认,进一步去除虚警干扰,获得更准确的检测结果。本文使用的可见光遥感图像中检测到的干扰目标形状不规则,而舰船目标呈条形状(以022导弹艇为例,长宽比3.5)且左右船弦呈对称分布,从图2(b)及图7(a)舰船图像数据集中可以看出,舰船目标形状特征较为规律,且多是两侧长边弦对称分布的狭条状。
遥感图像中舰船目标的位置方向随机,所以在提取候选区域目标切片后,提取候选区域目标切片梯度纹理形状融合特征前,需要确定目标主轴方向。本文使用PCA获取目标主分量方向。具体步骤:我们使用5.1节中疑似舰船目标候选区域定位流程中的目标形态学滤波后的二值分割结果,提取疑似目标区域的所有像素坐标,用PCA分析法提取疑似目标区域的第一主分量对应的变换系数。而舰船多是两侧长边弦对称分布的狭条状,第一主分量投影变换的方向就是目标的主轴方向。
图4是舰船目标与非舰船目标(岛屿、海浪、云块)的梯度方向特征。由图4(a)可以看出舰船梯度方向特征在3个区域块中1和5方向区间(垂直于主方向)的柱状图统计量明显大于其余方向区间的柱状图统计量而对于不是舰船的目标(图4(c)~(e)),其它梯度方向特征没有这个特点。同时,图4(b)说明梯度方向特征对带尾迹的小船同样有效,具有很好的尺度不变性。


(a)船及其梯度方向直方图特征(a)Ship and its corresponding histogram features of gradient directions

(b)尾迹小船及其梯度方向特征直方图(b)Wake ship and its gradient direction feature histogram

(c)岛屿及其梯度方向直方图特征(c)Island and its corresponding histogram features of gradient directions

(d)海浪及其梯度方向直方图特征(d)Wave and its corresponding histogram features of gradient directions

(e)云块及其梯度方向直方图特征(e)Cloud and its corresponding histogram features of gradient directions图4 梯度方向直方图特征Fig.4 Histogram features of gradient directions

图5 统一化直方图统计方差Fig.5 The histogram statistical variance of uniform
最后,对疑似目标区域切片进行梯度纹理融合特征描述,结合舰船目标切片的长宽比、紧凑度、矩形度等形状特征,进而获得最终的30维融合特征向量。此时,本文将舰船检测问题经过一系列的数据处理转化为将要解决的一个二分类问题,通过训练好的AdaBoost分类器来对疑似目标切片进行最终的判别确认,其中图6是Adaboost训练与测试错误率。
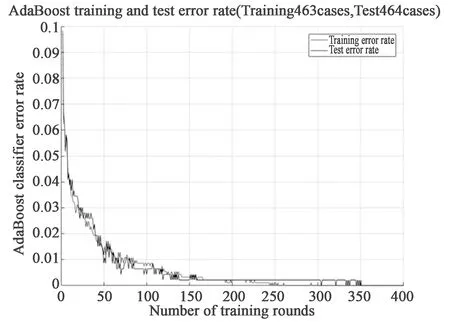
图6 Adaboost训练与测试错误率Fig.6 Adaboost training and test error rate
6 实验结果与分析
6.1 实验平台及数据
本文使用的硬件平台是Intel E33.30GHzCPU+16 GB内存,软件平台为Matlab 2016B。本文实验使用的259张2 m分辨率可见光遥感图像来源于高分一号和谷歌地图,这些图像的尺寸范围1 024×1 024到4 096×2 048。选取200幅遥感图像,使用ACDSee15软件截取407个正样本(舰船目标)数据集,如图7(a)所示;截取520个负样本(云块,岛屿,海浪,人造物等非舰船干扰)数据集,如图7(b)所示,尺寸范围10×10到200×200。
剩下的图像作为检测实验图,使用ACDSee15截取98张包含有418个船舶目标的图像,尺寸范围512×512到1 024×1 024。这些图像中包含含有孤岛、薄云及云块干扰的海面等复杂背景,以检测算法鲁棒性。

图7 样本数据集Fig.7 Sample data dataset
6.2 实验结果与分析
检测结果如图8所示,从左到右为3种海洋背景下的船舶检测结果,即含孤岛的海洋、薄云扰动的海洋以及云块干扰的海洋。图8(b)左图和中图的场景中,虚景是与舰船目标大小相似的岛屿,经过融合特征分类鉴别,检测出舰船,如图8(c)左图和中图所示。从图8(b)右图中场景中,虚景是云块亮度过高的区域剔除有残留导致,通过融合特征描述分类鉴别,最终检测出舰船,如图8(c)右图所示。从图8(b)、(c)中可以看出,该方法能够很好地在云雾干扰的海洋背景下定位出疑似舰船目标,并从疑似目标中准确筛选出船舶目标。
接着,结合自适应动态门限法与形态学滤波法处理全局显著图,对疑似舰船目标区域进行定位,然后用上述各节中介绍的形状梯度纹理融合特征提取疑似目标切片的向量,使用训练好的AdaBoost分类器模型进行特征分类剔除虚景,完成舰船目标确认鉴别。

(a)原图(a)Original image
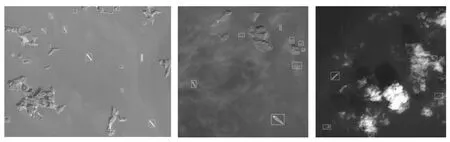
(b)疑似目标定位(b)Suspected target location

(c)检测结果(c)Detection results图8 舰船检测实验结果Fig.8 Example of ship detection results
为验证本文方法的有效性,我们将其与文献[6]、[8]、[9]中的方法进行了比较,选用召回率(Recall)和检测精度(Precision)作为评价指标。4种方法的检测结果对比如表2所示。此外,在算法耗时方面,算法训练AdaBoost分类器用时12.054 8 s;对于1 024×1 024大小的图像,各算法检测用时对比如表1所示。
召回率和检测精度的定义为:

(26)

(27)
式中:TP表示正确检测为舰船目标的数量,TR表示是实际检测到的舰船目标数量,FP表示将背景错误判定成舰船目标的数量。

表1 4种算法的检测耗时对比Tab.1 Time-consuming comparison of detection of four algorithms (s)

表2 4种算法的检测结果对比Tab.2 Comparison of detection results of four algorithms
7 结 论
本文提出了一种基于谱残差和梯度纹理融合特征的舰船检测方法,能准确提取海面舰船目标,获取舰船目标的数量和位置信息,在检测时间和精度上都能够满足实际工程需要。该方法通过谱残差模型结合自适应阈值法搜索定位海面舰船目标区域,可以有效抑制海面云雾、尾迹浪花等的干扰;结合舰船目标形状纹理特点,设计了梯度方向特征及形状纹理特征的融合特征,不受云块、小岛等虚假目标的干扰,能有效地描述舰船目标的特征。最后,利用AdaBoost分类器对目标进行了鉴别确认,得到了准确的检测结果。实验结果表明:本文提出算法的检测精度为95.51%,召回率为96.65%,可以满足海域舰船目标的快速定位和检测的准确性要求。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
舰船科学技术(2022年21期)2022-12-12 08:07:10
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
舰船科学技术(2021年12期)2021-03-29 01:28:44
铁道建筑(2021年11期)2021-03-14 10:01:48
科技风(2019年13期)2019-06-11 15:48:29
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
现代电子技术(2018年12期)2018-06-12 06:41:20
数字技术与应用(2016年6期)2016-07-09 08:06:51
舰船科学技术(2016年1期)2016-02-27 15:39:26