
LED显示屏相机采集过程中的渐晕补偿
2019-09-13 03:45王司潮郑喜凤毛新越程宏斌宇1
液晶与显示 2019年8期
王司潮,郑喜凤,毛新越,程宏斌,陈 宇1,
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.长春希达电子技术有限公司,吉林 长春 130103)
1 引 言
随着平板显示技术的发展,人们对平板显示设备的需求越来越大。LED显示屏以其主动发光、高色彩饱和度、广视角、高对比度、无缝拼接等优点,在显示市场中的需求日益迫切,这就对LED显示屏的显示质量提出了更高的要求,评价显示质量的重要指标之一就是显示均匀性[1]。
目前提高LED显示屏显示均匀性的主要方法是通过CCD相机对显示屏进行亮度采集再校正。但是在采集过程中,由于相机成像时部分轴外光束被拦截,导致离轴越远的光线在像面上的光强度越弱,这种现象就是相机的渐晕[2-7]。相机的渐晕会使图像的边缘下降,采集数据不准确,导致校正后的显示屏呈现出“中间暗,四周亮”的现象,因此需要进行渐晕补偿来提高亮度一致性。
文献[6]和[7]给出了两种通过LED显示屏进行渐晕补偿的方法,但前者没有对LED的离散性进行分析,也没有提出解决LED亮度离散性对相机渐晕补偿影响的方法;后者通过图像滤波,只能消除图像的高频差异,中、低频部分无法去除。文献[18]提出了基于二维Gauss曲面拟合的图像灰度补偿算法,根据图像灰度分布统计特性估算二维Gauss曲面的各个参数,从而实现渐晕补偿,但是积分计算部分准确度不高,导致结果也存在一定误差。文献[8]提出利用逐行拟合的方法进行渐晕效应的复原,可在一定程度上减轻渐晕效应的影响,但是当相邻两行的亮度变化较大时,会产生条纹。文献[9]对于渐晕现象的研究主要针对人眼的主观感受进行补偿,没有从客观上进行亮度还原。
因此,本文提出了一种应用统计学规律的相机渐晕补偿方法,通过高斯滤波和数据叠加减小亮度离散性,同时得到相机采集的渐晕曲面,在此基础上进行相机的渐晕补偿,可以更好地提高显示均匀性。此方法在实验中进行了验证,取得了理想的效果。
2 LED显示屏发光特性
2.1 温度对LED发光强度的影响
LED的核心部分是由P型半导体和 N 型半导体组成的晶片,其实质性结构是P 型半导体和 N 型半导体之间的过渡层,称为 PN 结。LED的发光原理是处于激发态的电子/空穴从高能级向低能级跃迁,与空穴/电子结合而发射光子。当PN结温度上升时,半导体的晶格振动幅度增加,当原子的振动能量高于一定值时,电子从激发态跃迁到基态时会与晶格原子(或离子)交换能量,发生无辐射跃迁,无法发射光子,而这种几率随着温度升高呈指数式增加,因此,当温度上升到一定程度后,半导体的发光强度就会下降[10-12]。而且晶格的振动,在一定程度上会影响能级的分裂,当原子能级变化时,电子跃迁产生的发光光谱也会随之变化,进一步导致LED的亮度改变。
所以工作温度对LED的发光亮度有很大的影响,本文提出的算法针对室内的显示屏,环境温度稳定在一定范围内,LED个体间温度差异较小,可以通过统计学消除温度造成的亮度差异。
2.2 工作电流对LED亮度的影响
LED亮度与工作电流的关系如图1所示。由图可知,LED 亮度随着电流强度的增加而增大,近似为线性关系[13-14],且每一个基色随电流增大程度也不相同。故而LED显示屏中的每一个LED所在的电路均会影响每个LED的发光亮度,这也会增加显示屏亮度的离散性差异。本文研究采用恒流驱动的显示屏,排除因电流变化过大导致的亮度问题。

图1 LED亮度与工作电流的关系Fig.1 Relation between LED brightness and working current
2.3 半导体器件自身的亮度离散性
同基色的LED发光管亮度本身具有很大的离散性,LED平板显示屏正是由成千上万个亮度相差比较大的LED发光管组成,即使是同一亮度档次的LED发光管,其亮度也存在30%~60%的偏差,这是造成显示屏亮度不均匀的根本原因[15-19]。
3 渐晕补偿算法
渐晕补偿算法的基本思路是:首先通过滤波降低采集过程中的噪声,再应用统计学规律,降低亮度离散性,得到相机的渐晕曲面,求逆得到相机渐晕补偿曲面,从而对LED显示屏进行相机渐晕补偿。
3.1 高斯滤波降噪
采集得到的数据不可避免的包括噪声,因此首先要对采集得到的数据进行降噪处理,常用的滤波算法有均值滤波、中值滤波和高斯滤波等。均值滤波使用模板内的平均值代替中心值,不能完全消除噪声,只能相对减弱噪声;中值滤波计算模板内的中值,并用中值代替中心值,这种方法虽可较好的消除噪声,但容易导致图像的不连续性。因此选择高斯滤波器进行降噪处理。
高斯滤波器实现降噪有两种实现方式,一种是离散化窗口滑窗卷积,另一种是傅里叶变换。由于傅里叶变换过程复杂,较难实现,因此当滑窗计算量不大时选择滑窗方法来实现。高斯噪声的滑窗卷积实际是一种加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过高斯函数加权平均后得到,具有低通特性。具体操作是通过建立模板,在待处理数据中移动模板,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值[9,20]。加权平均的权重值是由高斯模板系数决定的,模板中的系数通过高斯函数计算,计算高斯模板参数时,通过高斯公式:

(1)
其中:(x,y)为点坐标,σ是标准差。以模板的中心位置为坐标原点,将各个位置的坐标代入公式(1)中,得到的值就是模板系数。绘制出的二维高斯图像如图2所示。

图2 二维高斯图像Fig.2 Two-dimensional Gauss image
3.2 阈值设定
LED显示屏的校正标准取决于人眼的视觉精度[20]。通过人眼对比敏感度函数曲线与文献[2]中的实验可知,人眼视觉敏感性的亮度阈值约为1.2%,也就是说当亮度差异小于1.2%时,人眼基本无法分辨出亮度差异。因此,当像素亮度的最大相对误差小于1.2%时,可以认为人眼已经分辨不出亮度差异,显示屏呈现亮度一致性。
3.3 渐晕补偿
(1)设定型号A箱体,对该型号箱体进行暗场采集,得到暗电流噪声,设暗电流噪声矩阵为D,每个像素的暗电流噪声记为为dxy(x,y为各像素点横纵位置坐标)。即:
(2)
(2)使用相机在暗室对一定数量的A型号的箱体进行亮度采集,第k个显示屏箱体的原始亮度矩阵记为Lk(k=1,2,3,…,n),通过高斯滤波去除高频噪声后亮度矩阵记为Fk,每个像素的亮度为fxy(x,y为各像素点横纵位置坐标)。即:
(3)
(3)将采集到的每箱LED显示屏亮度值叠加,令
(4)
其中:μk为去除暗电流噪声后k个箱体亮度数据的平均值矩阵,Δk为第k次叠加后与第k-1次叠加后的相对亮度差异矩阵,Δkmax为该矩阵最大相对亮度差异,则

(5)
Δkmax=max(|Δk|),
(6)
当满足公式(7)时,停止叠加,认为此时得到的即为光滑的相机渐晕曲面,记第(k+2)次的曲面为P(x,y)(x,y为各像素点横纵位置坐标)。
(7)
(4)对相机渐晕曲面的每一个点进行取倒数运算,得到相机渐晕的补偿曲面S(x,y),用补偿曲面S(x,y)对LED显示屏进行渐晕补偿。
(5)用光谱色度计对修正后的LED显示屏进行亮度测量,分析修正后的亮度均匀性。
4 实验验证
4.1 箱体验证实验
实验选取一定数量的160×160个像素点的A型LED显示屏箱体,像素点间距为1.27 mm,对箱体进行标号。首先使用光谱色度计对1号箱体亮度进行测量,测量方法按照行业标准 SJ/T 11281_2017 中 4.21 规定的方法进行。设定测量步长为16,得到一个10×10的亮度矩阵Qxy(x,y= 0~9)。测量数据如表1所示,经计算得Qxy的最大亮度差异约为9%。
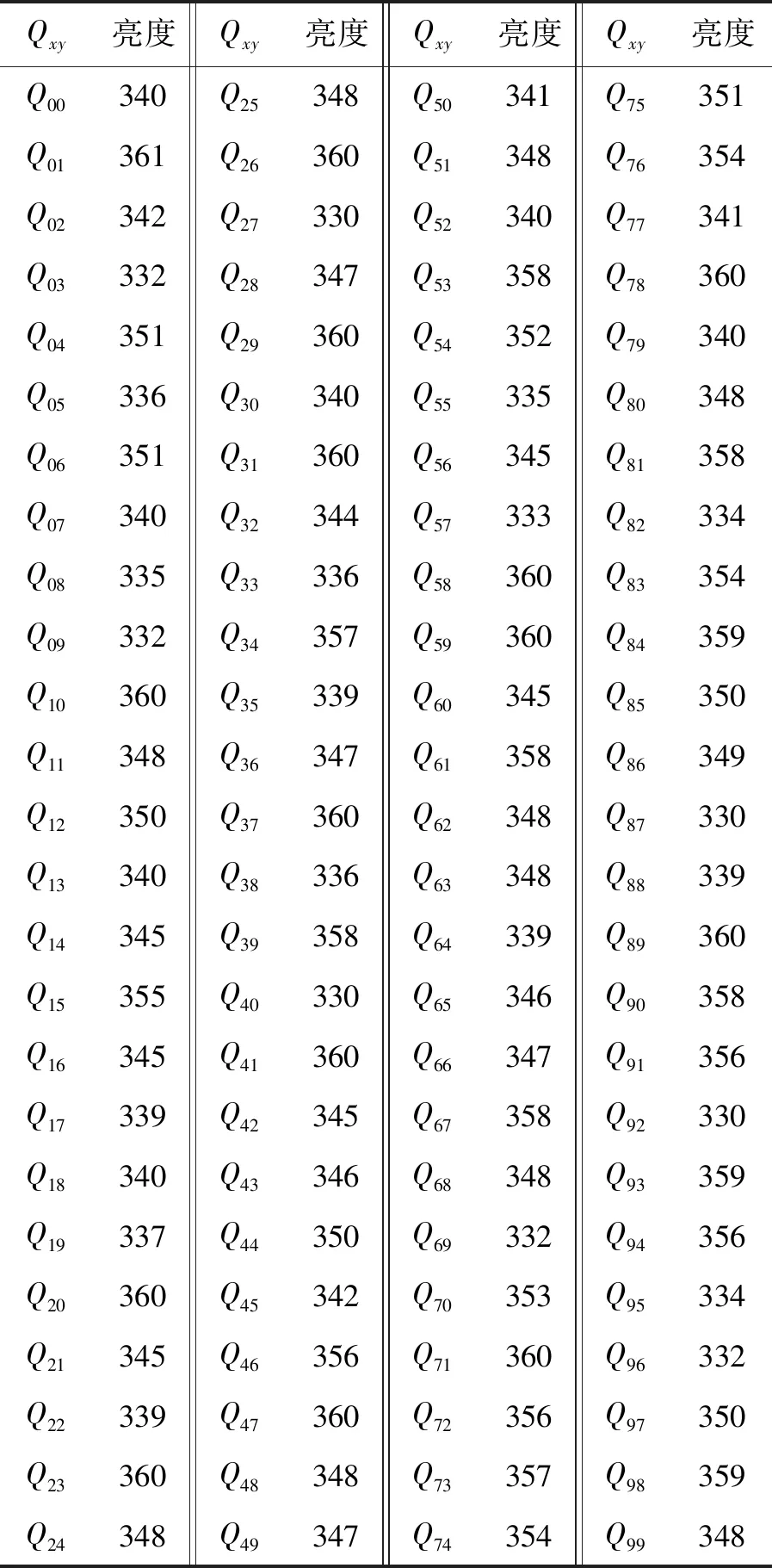
表1 渐晕补偿前亮度值Tab.1 Brightness value before vignetting compensation cd/m2
绘制出的亮度分布如图3所示。

图3 补偿前亮度分布Fig.3 Brightness distribution before compensation
使用CCD相机在暗室环境下对A型号LED显示屏进行暗场采集,相机距显示屏5 m,得到暗电流噪声。
接下来进行亮度采集,首先在暗室环境下采集一组LED显示屏的亮度,对采集到的数据进行高斯滤波,为有效抑制图像的高频噪声并保留低频分量,本文采用5×5标准差为1的模板,以保证输出响应仍在原来的亮度范围。去掉高频噪声与暗电流噪声后后,LED显示屏的亮度差异就是亮度离散性差异与相机渐晕带来的。为了更好地观察采集数据的离散性,提取出中心行亮度并绘制曲线图,对数据归一化后中心行亮度分布如图3所示。通过中心行亮度曲线图可以看出,由于亮度的离散性导致采集形成的亮度数据曲线并不光滑,产生的“毛刺”非常明显。
接下来在同样的测量条件下,重复上述操作,对下一个同样的A型号箱体进行亮度测采集,并将第二次与第一次测量数据叠加,去除暗电流噪声后取平均,以此类推,采集到第5个箱体时,滤波后中心行亮度归一化后曲线图如图4所示。
由图4可以看出,由于亮度离散性导致的“毛刺”现象较只采集一个箱体时有所改善,但曲线仍不光滑,故继续采集并将数据叠加。


图4 第1箱显示屏亮度。(a)亮度曲面图;(b)中心行亮度曲线图。Fig.4 Brightness of the 1st box display screen.(a)Brightness surface;(b)Brightness curve of central tine.

图5 第5箱亮度中心行断面曲线图Fig.5 Brightness curve of central line of the 5th box display screen
当叠加至第20个箱体的亮度数据时,已经得到一个较为光滑的曲线。高斯滤波后归一化的数据如图5所示。
经计算,Δ18=1.08%,Δ19=1.02%,Δ20=0.98%,符合阈值条件,停止叠加,认为该曲面已经消除了亮度离散性差异,是一个光滑的相机渐晕曲面。
对该光滑渐晕曲面进行求逆运算,得到渐晕补偿曲面,将渐晕补偿曲面作为修正系数对1号LED显示屏进行渐晕补偿。补偿后亮度归一化分布如图6所示。
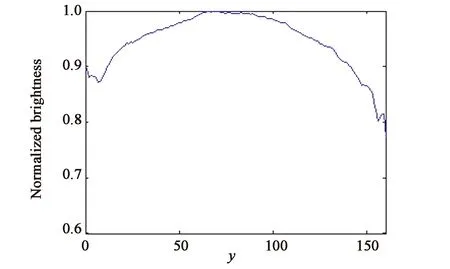
图6 第20箱显示屏中心行亮度曲线Fig.6 Brightness curve of center line of the 20th box display screen

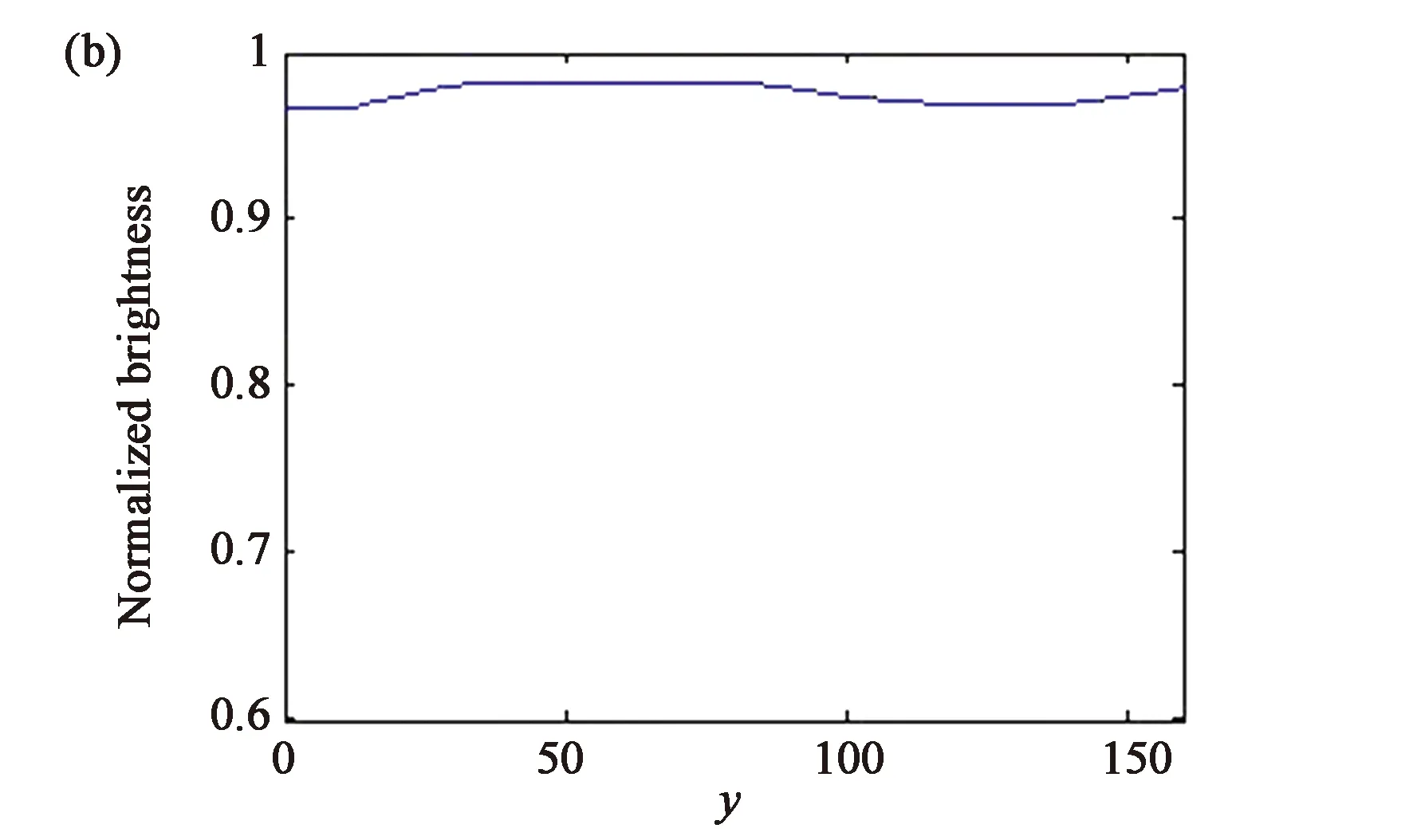
图7 渐晕补偿后亮度。(a)亮度曲面图;(b)中心行亮度曲线图。Fig.7 Brightness after vignetting compensation.(a)Brightness surface;(b)Brightneis curve of centra line.
4.2 数据分析与实验结论
用光谱色度计对渐晕补偿后的1号LED显示屏进行亮度测量,设定步长为16,得到修正后的10×10亮度矩阵Sxy(x,y= 0~9)。测量数据如表2所示。
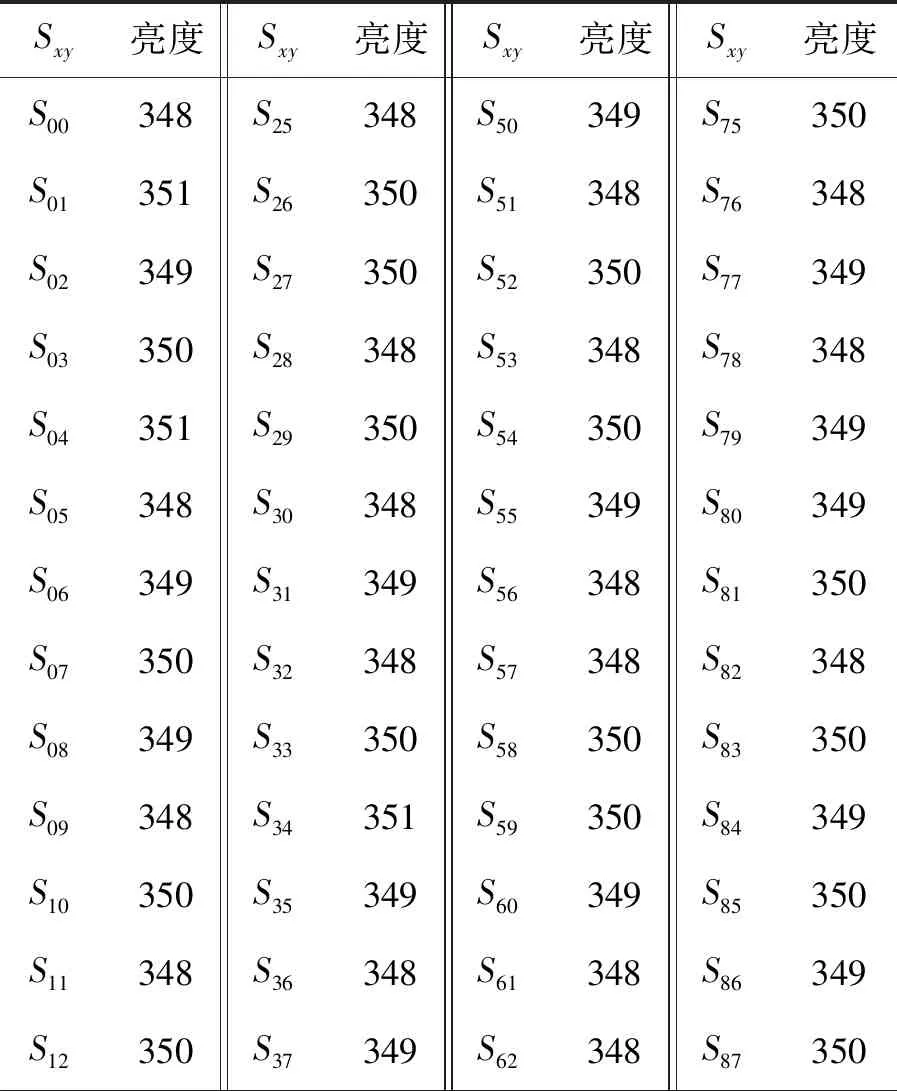
表2 渐晕补偿后亮度值Tab.2 Brightness value after vignetting compensation cd/m2

续 表

图8 补偿后亮度分布Fig.8 Brightness distribution after compensation
绘制此时的亮度分布图,如图8所示。
计算Sxy各元素的最大亮度差异:
(8)
可见,经过渐晕补偿后,LED显示屏的亮度差异较渐晕补偿前的9%有很大改进,大大提高了显示屏的显示均匀性。
同时使用现阶段工程中使用的渐晕补偿算法对该显示屏进行渐晕补偿,使用光谱色度计用同样的测量方法进行测量,得到修正后的10×10亮度矩阵Nxy(x,y= 0~9)。测量数据如表3所示。
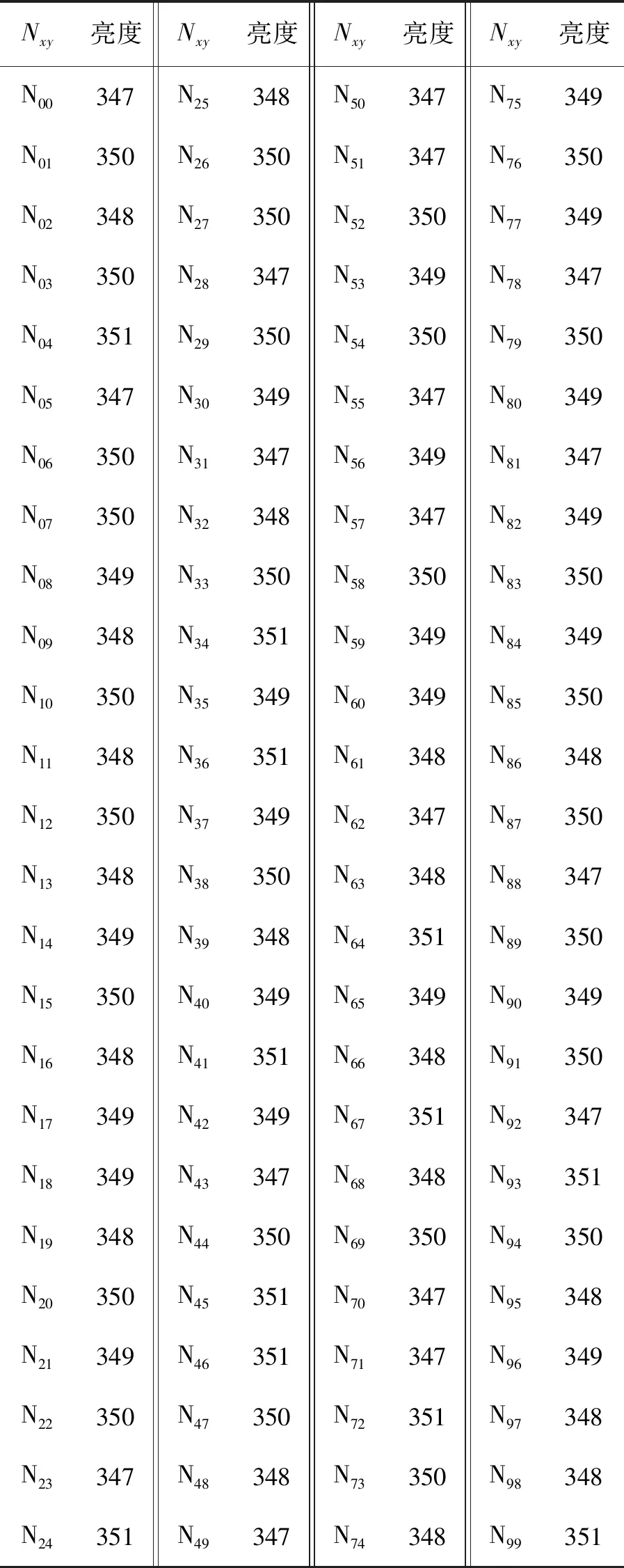
表3 渐晕补偿后亮度值Tab.3 Brightness value after vignetting compensation cd/m2
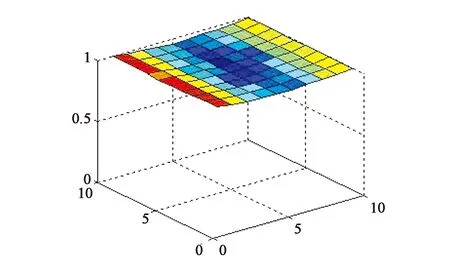
图9 补偿后亮度分布Fig.9 Brightness distribution after compensation
亮度分布如图9所示。
计算Nxy各元素的最大亮度差异:

(9)
通过对比实验可以看出,经现阶段工程中使用的渐晕补偿方法补偿后的显示屏的最大亮度差异为1.15%,本文算法可以将显示屏的最大亮度差异降低至0.86%,较现有方法而言有较大进步。而且经过大量不同的显示屏验证证明本文的算法具有高准确性和普适性,对多块不同的显示屏的渐晕补偿效果较好。
5 结 论
本文从降低LED发光像素自身的亮度离散特性角度出发,提出了一种基于统计学原理的相机渐晕补偿算法。在高斯滤波消除高频混叠噪声的基础上,利用数据迭代的方法得到光滑的相机渐晕曲面,求逆得到相机渐晕修正系数,从而对LED显示屏进行渐晕补偿。实验结果表明,通过该方法修正后的显示屏,最大亮度差异由9%降低至0.86%,证明了该方法的有效性。而且在实际工程应用中,该方法只需用相机对LED显示屏箱体进行亮度采集,操作简单,可实施性高。此外,由于本文的算法是对针对相机提出的补偿算法,故而该方法适应于任何平板显示产品,尤其适用于高密度、小间距的显示产品。
猜你喜欢
军事文摘(2022年10期)2022-06-15
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
数学年刊A辑(中文版)(2019年2期)2019-05-20
作文大王·低年级(2019年2期)2019-01-23
中国知识产权(2018年4期)2018-05-04
科技创新导报(2017年11期)2017-06-15
高中生学习·高三版(2017年2期)2017-03-28
建筑科学与工程学报(2016年5期)2016-11-09
中国照明(2016年6期)2016-06-15
