基于RTDS仿真的最大功率点交叉检验的MPPT研究
2019-09-13 03:13王耀坤姜志慧
通信电源技术 2019年8期
王耀坤,姜志慧
(珠海市钰海电力有限公司,广东 珠海 519055)
0 引 言
光伏系统中,光伏板组成阵列可以被看作是直流电流电源,通常需要经过直流-交流(DC-AC)逆变器后再接入电网。光伏板的发电功率是由有效接收的太阳辐射决定的,由于太阳辐射等外界环境的变动性,需要采取最大功率追踪(MPPT)来跟踪最大功率点(MPP)。
目前,已有许多MPPT算法的研究,如固定步长法、扰动观察法(P&O)和电导增量法(INC)等[1-6]。基于C曲线的可变步长电导增量MPPT算法引入了变化因子,使步长根据距离MPP的远近而改变大小,可以在快速跟踪MPP同时减小MPP的震荡现象。然而,该算法也存在问题,当PV工作点接近并穿过MPP时,仍会引起明显的震荡现象,从而降低光伏系统的电能质量。
因此,本文通过实时数字模拟器(RTDS)仿真平台,改进设计并建立了一种具有最大功率点交叉校验(MPPcrosscheck)的可变步长增量电导MPPT算法,实现了高效和低震荡的MPPT算法目标。实时数字模拟器(RTDS)是专门为研究电力系统中的电磁瞬变而设计的设备,是由RTDS硬件和RSCAD软件组成,可以连续地计算出并给出近似代表实际电力系统情况的结果,实时仿真时间步长小[7]。
1 基本原理
1.1 基于C曲线的可变步长电导增量MPPT
由于受到光照、温度及遮蔽等外部环境的影响,PV电源的发电功率总在变动。因此,PV系统需要具有连续搜索并跟踪MPP的能力。MPPT基于光伏电源的P-V特性,是一种用于跟踪最大光伏功率的控制方案,通常由光伏系统的DC-AC逆变器来控制。该算法通过采样计算相关参数,控制逆变器,以确保系统达到最高的能量转换效率。MPPT的质量往往取决于跟踪MPP的效率、跟踪的震荡幅度以及外部条件变化时的跟踪速度。
电导增量算法可以快速地追踪外部环境的变动,并且具有相对较高的精度和稳定性。该算法根据PV特性曲线的斜率跟踪MPP,如果斜率为正,意味着PV工作点位于MPP的左侧,反之亦然。一种改进的可变步长电导增量算法,PV工作点距离MPP较远时步长取最大步长,距离MPP较近时取很小步长,既能快速跟踪变化,又能显著降低PV工作点在MPP的震荡。具体公式为:

其中,Vref为用于实现控制的参考电压。

基于C曲线的可变步长电导增量算法引入了C曲线:C曲线斜率的正负符号可以用于表示PV工作点距离MPP的远近。同时,根据PV曲线的斜率来确定步长Sk。其中Vref为参考电压、dVref为设定的最大步长。具体公式为:

因此有:

1.2 仿真平台及算法建模
用于搭建算法的仿真平台为RTDS内建的PV系统模型,如图1所示。

图1 基于RTDS的光伏系统仿真模型
该系统是一个典型光伏系统,由13.2 kV三相输电线路连接的光伏模块、电网和动态负载组成[8],拥有多个控制端口。在RTDS中构建控制算法并设置采样频率为40 Hz,最大步长为0.04 kV,C曲线中的N为1。
然而,源于C曲线MPPT的缺陷,实时运行中,PV在MPP附近工作时有明显的扰动和震荡。
1.3 基于C曲线MPPT的改进分析
当MPPT实时运行时,用于计算和条件检查的所有参数都依赖于直流电压Vk和光伏电流的采样,因此实际的PV曲线斜率和Vre曲线斜率是基于采样的近似值。为了方便分析,规定条件语句,如下所示:

其中,ΔVk=Vk-Vk-1,ΔPk=Pk-Pk-1,ΔCk=Ck-Ck-1。
当跟踪MPP时,很难精确地控制PV工作点使其正好落在MPP。因此,Vk和Vref会在MPP的左右两侧往复震荡。图2为PV工作点穿越MPP时的采样过程。
由图2可知,当PV工作点穿过MPP时,ΔVk的符号不变。然而,的符号无法确认,因为此时分别位于MPP的两侧,无法被视为斜率近似值,可以大于或小于从而导致步长的失序。
2 算法改进
2.1 MPP交叉检验
表1为PV工作点穿越MPP时的采样过程。

图2 PV工作点穿越MPP时的采样过程

表1 PV工作点穿越MPP时的采样过程
由表1可知,当PV工作点穿越MPP时,IF3k和IF4k输出的1或0的概率约为50%,这导致算法在MPP附近追踪时出现了约为50%的最大步长±max(dVref),使参考电压Vref大幅来回震荡,进而导致光伏输出功率的大幅波动。为了改进上述算法,本文引入了MPP交叉检验(MPPcrosscheck),其定义如下:


在最大步长算法路径前引入IF3cc,当PV工作点在MPP附近并穿越MPP时,能使步长保持在一个很小的值(Sk),可以避免出现大步长的失序现象。根据此原理,改进的MPPT算法的逻辑框图如图3所示。

图3 带有交叉检查的可变步长电导增量MPPT逻辑框图
2.2 MPP停止追踪算法
电导增量MPPT是一种不间断的追踪算法,由于控制系统本身的局限性以及光伏系统和外部条件的多重干扰,使得PV系统直流端的电压难以完全被追踪和控制。当MPPT在MPP附近工作时,被追踪和控制的直流回路电压会在MPP周围往复交叉移动。因此,加入MPP停止追踪算法(MPPstop)。综合MPPcrosscheck与MPPstop的MPPT算法的逻辑框图如图4所示。
3 仿真结果及分析
图5、图6与图7、图8分别展示了恒定光照强度(1 000 W/m2)下与光照强度阶跃变化(400~1 000 W/m2)时几种MPPT算法的仿真结果,其中横轴为时间t/s,纵轴包括PV直流输出电压VDCA8、PV直流参考电压VMMPA和PV直流输出功率Pin。
3.1 恒定光照强度(1 000 W/m2)
图5显示了固定步长MPPT的问题,其中在MPP附近往复追踪导致了电压和功率的震荡。如图6采用改进的带交叉检验的变步长MPPT算法,明显使震荡减小,显著提高了PV系统直流回路功率(Pin)的追踪精度和追踪效率。此外,图6比图5具有更高的平均输出电压及功率,同时消减了往复追踪带来的震荡。
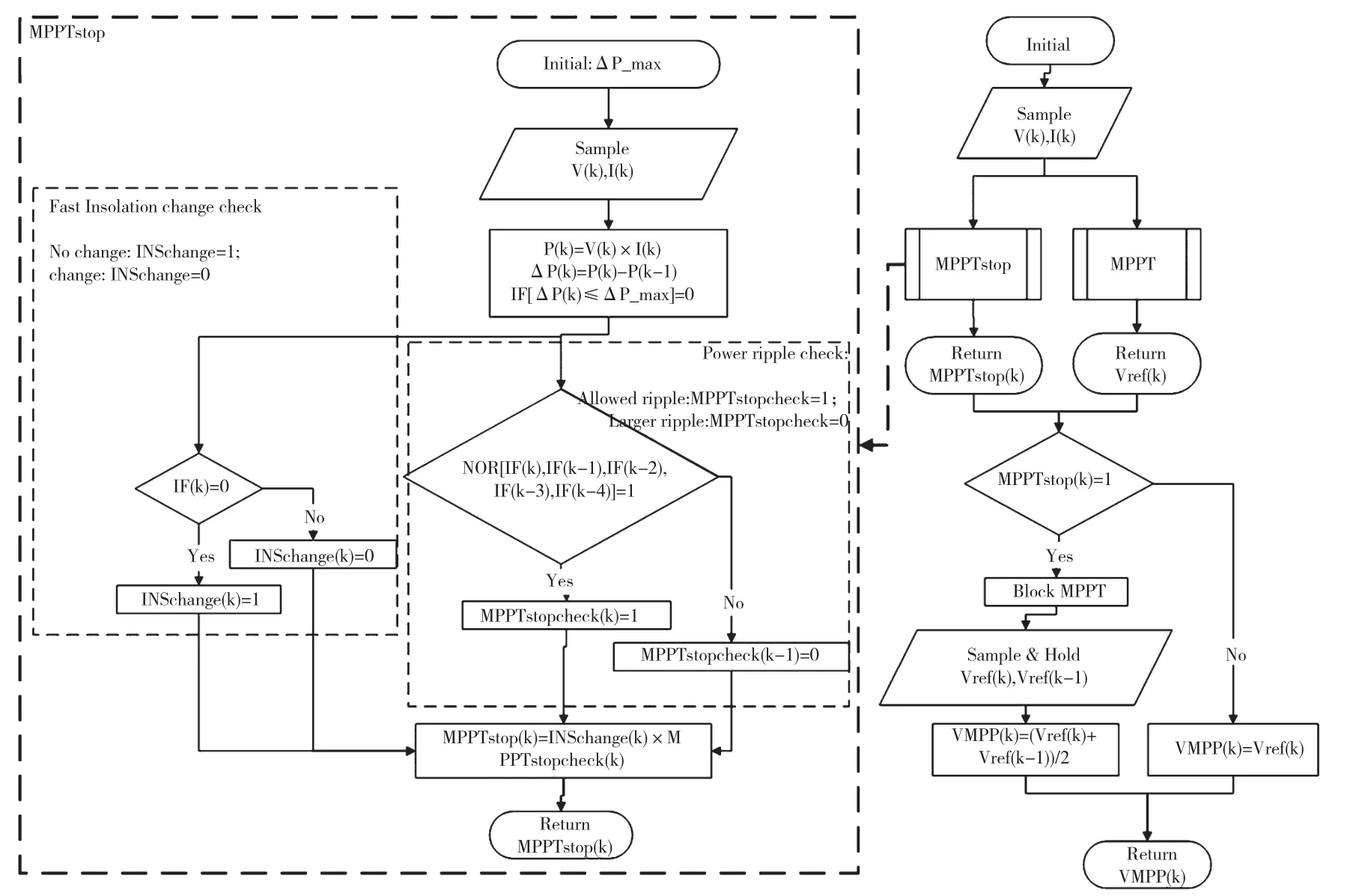
图4 MPPcrosscheck和MPPstop的全局结构逻辑框图
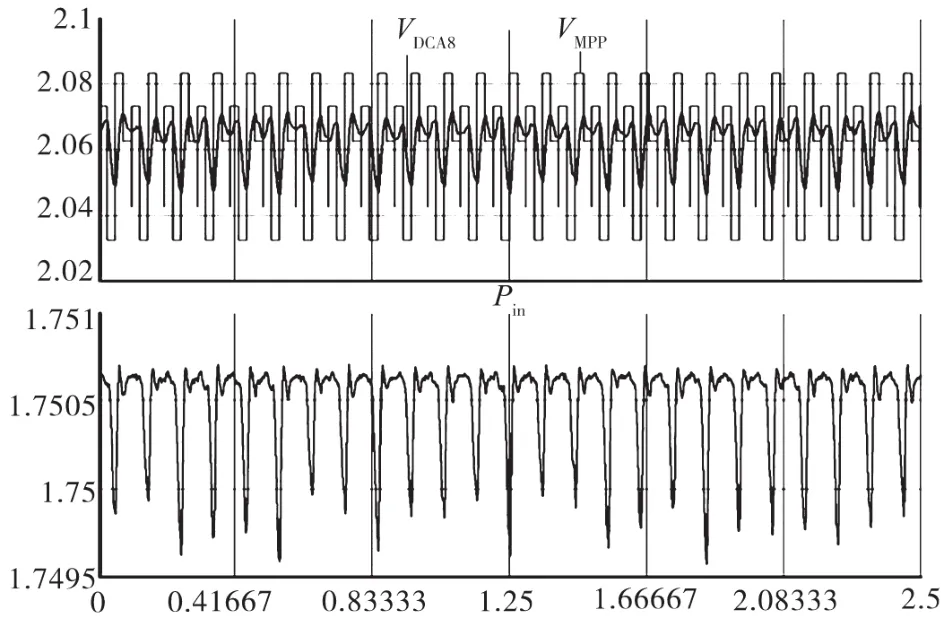
图5 基于固定步长MPPT的仿真结果(光强恒定)
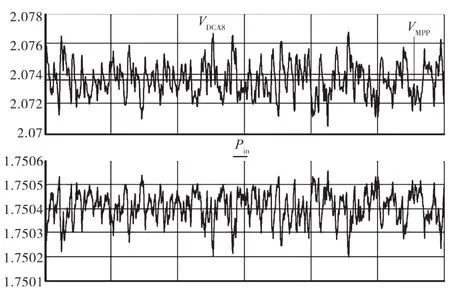
图6 带有MPPTstop和MPP交叉检验的MPPT仿真结果(光强恒定)

图7 基于固定步长MPPT的仿真结果(光强变化)

图8 带有MPPTstop和MPP交叉检验的MPPT仿真结果(光强变化)
3.2 光照强度阶跃变化(400~1 000 W/m2)
光强阶跃变化中,改进的MPPT算法相较于典型的固定步长MPPT算法,其PV直流回路电压能够更快接近光强变动后的MPP,同时电压的震荡幅度也相对较小,提高了PV系统追踪日照变化的效率。
4 结 论
通过基于RTDS的光伏系统的MPPT算法建模和实时仿真,引入了MPP交叉校验并改进了基于C曲线的MPPT算法,使系统在追踪电压并穿越MPP时保持微小的步长,同时MPP停止算法可以消除连续往复追踪MPP而引起的电压及功率的震荡。仿真结果表明,改进后的MPPT使PV系统直流端的输出性能有所提高,使其相较于经典的固定步长MPPT算法具有更小幅的功率震荡和更高的追踪效率。
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
湖北大学学报(自然科学版)(2022年5期)2022-09-07
健康护理(2022年3期)2022-05-26
成都信息工程大学学报(2021年5期)2021-12-30
西安邮电大学学报(2021年1期)2021-04-19
湖北民族大学学报(自然科学版)(2021年1期)2021-04-02
物理之友(2020年12期)2020-07-16
电子制作(2018年14期)2018-08-21
福建中学数学(2016年7期)2016-12-03
北京航空航天大学学报(2016年12期)2016-02-27