机电式防踏空踏板自动翻转控制方法研究
2019-09-10 18:25:50谷树人
赤峰学院学报·自然科学版 2019年4期
谷树人

摘要:为解决常规防踏空踏板自动翻转控制方法在复杂工作环境影响下控制有效性较低的不足,本文提出了机电式防踏空踏板自动翻转控制方法.基于对防踏空踏板自动翻转机械本体及控制端构成的分析,结合检测传感器数据的获取及参数计算、依托电子控制单元执行命令的发出与执行器机构的运行,实现提出的机电式防踏空踏板自动翻转控制,试验数据表明,提出的控制方法较常规控制方法,控制有效性提高17.77%,适合复杂工况的防踏空踏板自动翻转控制.
关键词:防踏空踏板;自动翻转;控制方法;控制研究
中图分类号:TH16;TP27 文献标识码:A 文章编号:1673-260X(2019)04-0111-03
0 引言
常规防踏空踏板自动翻转控制方法采用齿轮传递的方式实现防踏空踏板自动翻转控制.但在复杂工作环境影响下,常规防踏空踏板自动翻转控制方法存在控制有效性较低的不足[1],不适合复杂工况的防踏空踏板自动翻转控,为此提出机电式防踏空踏板自动翻转控制方法研究.基于对防踏空踏板自动翻转机械本体及控制端构成的分析,结合对前端距离的计算、翻转角度的计算、以及最大运动角的计算.依托电子控制单元执行命令的发出与执行器机构的运行,实现提出的机电式防踏空踏板自动翻转控制方法研究,试验结论表明,提出机电式防踏空踏板自动翻转控制方法具备极高的有效性.
1 机电式防踏空踏板自动翻转控制
1.1 防踏空踏板自动翻转机械本体及控制端的构成
生活中防踏空踏板应用极为广泛,例如火车地铁进站车厢与站台间的间隙需要加装防踏空踏板,防止人流较大,有人误踏空,导致踩踏事件[2].再如电梯连接处、两个不连接的位置,为了人身安全,均会加装防踏空踏板,因此对防踏空踏板的自动翻转控制提出了更高的要求[3].
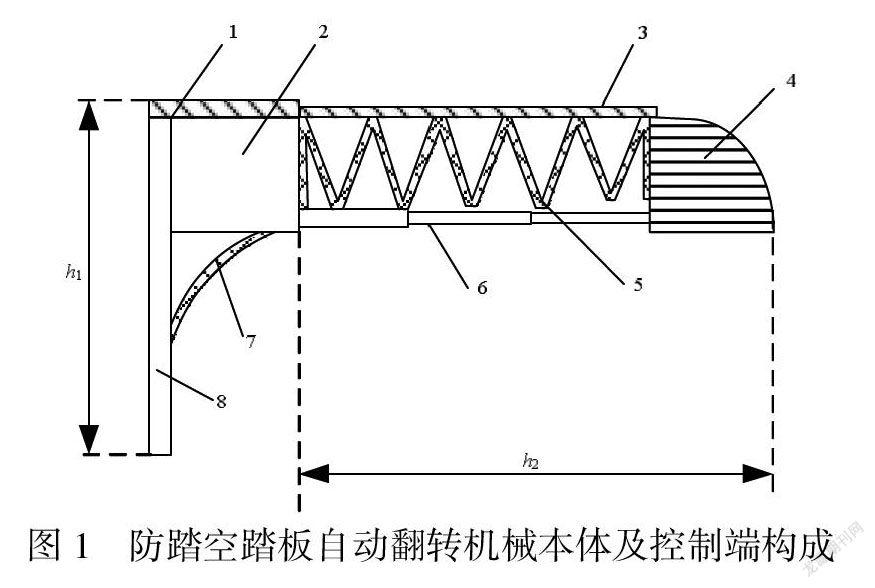
机电式防踏空踏板自动翻转控制方法是采用检测传感器数据的获取,电子控制单元发出执行命令,执行器机构运行,完成机电式防踏空踏板自动翻转的控制,其防踏空踏板自动翻转机械本体及控制端的构成如图1所示.
图1中,1为自动翻转控制机构的耐踩踏层,2为自动翻转控制机构,其中包括电子控制单元以及执行器机构两部分组成,3为翻转机构,用于防止踏空的机构,4为检查传感器,5为支撑机构,6为支撑底面,7为侧面支撑,8为防踏空踏板安装界面.h2为防踏空踏板位置,h1为防踏空踏板高度.
1.2 检测传感器数据的获取及参数计算
检测传感器数据的准确获取与正确计算是机电式防踏空踏板自动翻转控制的核心程序,未能正确的相应翻转控制,将直接影响控制有效性[4].检测传感器嵌与图1位置4中,通过最先获取相关位移、时间、环境等变量信息,进行参数计算,为电子控制单元发出执行命令做准备.
检测传感器数据参数计算主要是对前端距离的计算、翻转角度的计算、以及最大运动角的计算.前端距离的计算能确定良好的前端距离,与前端物体不产生刮碰,且能尽量减少空隙.翻转角度的计算是为电子控制单元提供执行命令数据.最大运动角的计算是为执行器机构的运行提供参数范围.
设检测传感器获取非翻转状态下前端位移为xi,目的翻转位移为x,机械阻力为F0,摩擦系数为μ,则前端距离的计算公式可用公式(1)表示[5]:
1.3 电子控制单元发出执行命令
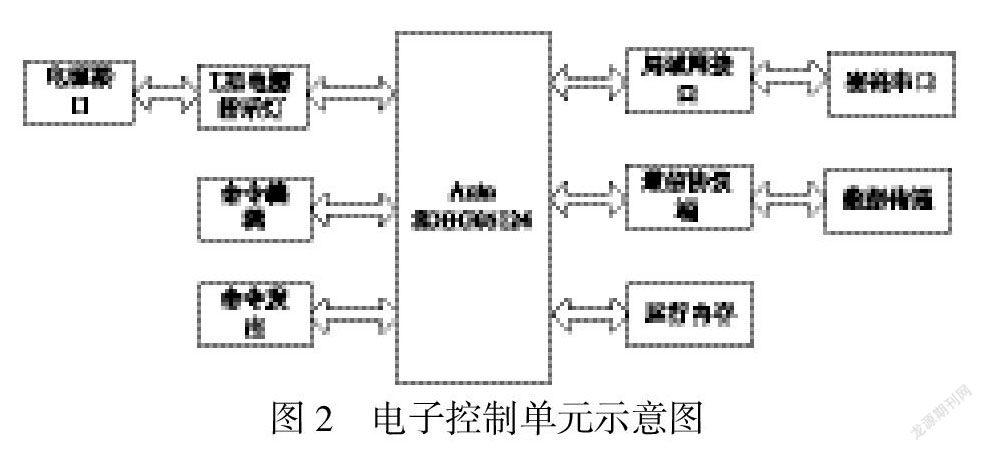
电子控制单元是由电源模块、通信模块、内存模块、命令编译模块构成,其中电源模块包括电源接口、为电子控制单元提供必要的电能.通信模块为检测传感器数据的获取、执行器机构的运行提供通信服务,内存模块包括Auto SDGH05124中央數据处理器与运行内存,为电子控制单元核心机构,命令编译模块为执行器机构的运行提供命令,如图2所示[8].
电子控制单元发出执行命令发出过程,首先,利用通信模块获取检测传感器数据参数计算结果;然后划定前端距离、翻转角度、最大运动角区域,最后通过命令编辑与发出功能,命令执行器机构执行命令,完成电子控制单元执行命令的发出.
1.4 执行器机构的运行
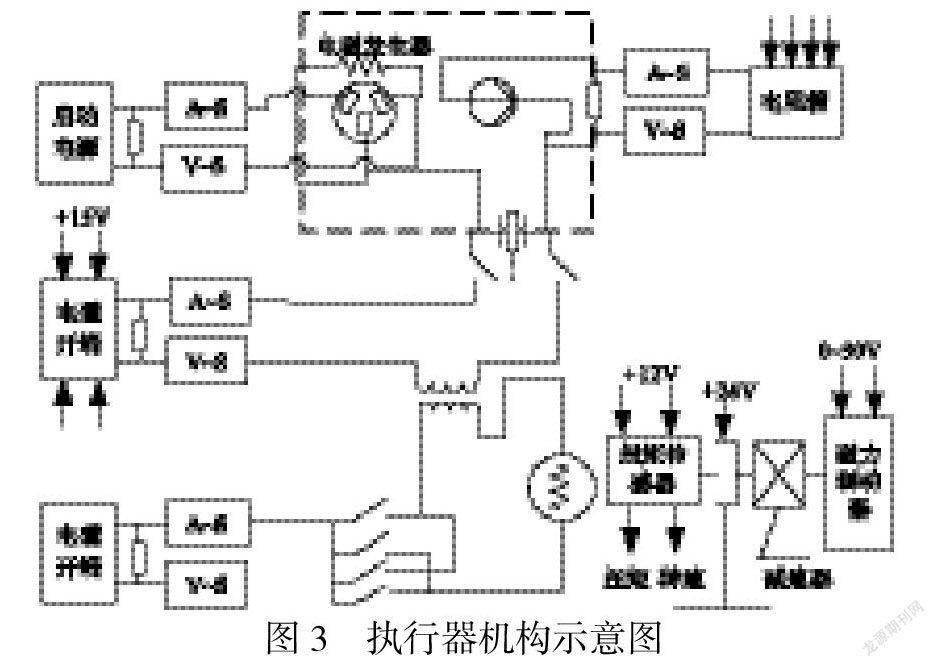
执行器机构主要是根据电子控制单元发出执行命令,进行防踏空踏板自动翻转执行控制的.主要通过电磁发生器、扭矩传感器、扭矩传感电机、磁力制动器、减速器、电磁离合器实现的.其执行器机构示意图如图3所示.
启动电源,运行端获得电子控制单元发出执行命令,接入A~S信号,电磁发生器提供动能,根据执行命令调整扭矩传感器、扭矩传感电机、磁力制动器等机构,实现防踏空踏板自动翻转控制.
2 工程实例分析
为了保证本文提出的机电式防踏空踏板自动翻转控制方法研究的有效性,进行现场防踏空踏板自动翻转控制数据测试.在不同的工作环境、使用频率、不同载重环境下,进行控制有效性实验.
2.1 实验数据准备
实验地点:防踏空踏板使用场所.
实验材料:两套防踏空踏板自动翻转控制方法,秒表、电子秤量程10~150kg,必要的施工工具,灵敏度传感器,北京拓普海思测控技术有限公司DFB-514型,计算机.
实验项目:0~60min模拟不同人群,经过防踏空踏板,检测两套防踏空踏板自动翻转控制系统的有效性,采用灵敏度对两套防踏空踏板自动翻转控制有效性进行量化.
2.2 实验测试过程
1、选定两处相同的试验场地,装有防踏空踏板,接入本文提出的机电式防踏空踏板自动翻转控制方法,以及常规防踏空踏板自动翻转控制方法.
2、试运行5min,保证两种控制方法能够稳定、完全运行,不能对测试人员产生人身伤害.
3、选择60人为一个单位,在10min中内通过防踏空踏板,其中60人被分为三组,即快速通过组、慢速通过组、和正常速度通过组.测试两套防踏空踏板自动翻转控制方法的响应灵敏度.
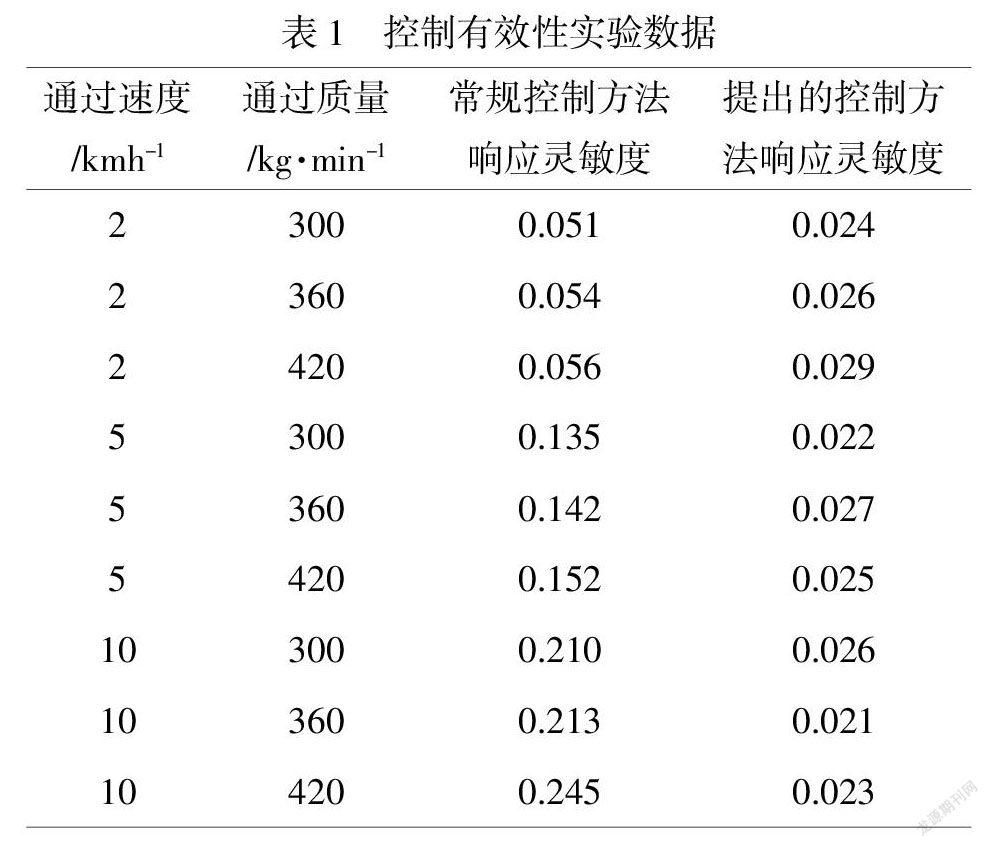
4、控制不同体重的人群,重复步骤3的实验过程,分析通过速度、通过质量(单位时间平均质量,例1小时通过1个人,体重为60kg,则通过质量为1kg/min)对两套防踏空踏板自动翻转控制方法的灵敏度影响,并记录实验数据,如表1所示,响应灵敏度单位为s.
2.3 实验数据结果分析
分析表1,可以得出,通过速度对常规控制方法响应灵敏度影响较大,通过质量对常规控制方法响应灵敏度影响较小,提出的控制方法响应灵敏度受通过速度、通过质量影响较小,这里我们引入极差统计实验数据中的变异量数,又平均极差可用公式(4)表示:
式中,Xmax代表计算数据的最大值,Xmin代表计算数据的最小值,1/3表示三个变量的平均值,其常规控制方法响应灵敏度通过速度平均極差为0.019,提出的控制方法响应灵敏度通过速度平均极差为0.005,常规控制方法响应灵敏度通过质量平均极差为0.169,提出的控制方法响应灵敏度通过质量平均极差为0.0053.
基于平均极差的计算得出,常规控制方法响应灵敏度受通过质量影响最大,提出的控制方法响应灵敏度受两者影响均较小,得出提出的控制方法较常规控制方法控制有效性提升17.77%.(0.169+ 0.019-0.005-0.0053)×100%=17.77%,适合复杂工况的防踏空踏板自动翻转控制.
3 总结
本文提出了机电式防踏空踏板自动翻转控制方法研究,基于检测传感器数据的获取及参数计算、电子控制单元执行命令的发出、执行器机构的运行实现本文的研究.实验数据表明,设计的控制方法较高的控制有效率.希望本文的研究能够为多机电式防踏空踏板自动翻转控制提供理论依据.
参考文献:
〔1〕郑天池,邵建新,郭琳娜.铝电解电容器芯包引脚刺孔机控制系统设计[J].工程设计学报,2016,23(4):378-384.
〔2〕任必兴,杜文娟,王海风.UPFC与系统的强动态交互对机电振荡模式的影响[J].电工技术学报,2018,33(11):2520-2534.
〔3〕王瀚林,吕茂隆,刘树光.一类输入受限非线性系统动态面控制方法研究[J].计算机仿真,2017,34(3):51-55.
〔4〕徐飞,孟庆浩,罗冰.一种飞艇自适应控制方法及其稳定性能仿真[J].计算机仿真,2016,33(9):97-100.
〔5〕殷国良,尤波,许家忠.胎面翻转机构的翻转分析及ADAMS仿真[J].哈尔滨理工大学学报,2016, 21(6):100-105.
〔6〕张前卫,何海龙,张树庆.结构用集成材拼方自动上料设备的研制[J].林产工业,2016,43(6):46-49.
〔7〕荣娜,李泽滔,韩松.改进的机电振荡模式相对局域性指标及其适应性[J].电力自动化设备,2017, 37(2):140-144.
〔8〕张世隆,王建中,施家栋.微小型翻转爬楼梯机器人抗跌落技术[J].机械强度,2016(5):1021-1028.
猜你喜欢
知音励志·社科版(2017年1期)2017-03-15 18:55:45
居业(2016年9期)2016-12-26 08:44:59
科技创新与应用(2016年33期)2016-12-17 14:16:47
文艺生活·中旬刊(2016年11期)2016-12-13 21:19:27
中国科技博览(2016年23期)2016-12-09 18:33:02
企业技术开发·下旬刊(2016年9期)2016-11-23 03:24:41
中国集体经济(2016年26期)2016-11-19 12:19:48
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 19:45:26
建材发展导向(2016年5期)2016-10-19 13:53:37
商场现代化(2016年19期)2016-07-29 17:37:01