
方位序列图像空间结构采样方法研究
2019-09-10 07:22:44赵静
甘肃科技纵横 2019年5期
关键词:最小二乘法






摘要:为了实现对产品表面的快速自动无损检测,需获取产品在全周向视角下垂直于光路的图像序列,在系统固有分辨率保证能识别最小结构尺寸的前提下,提出了方位序列图像空间结构采样方法。针对产品表面不同空间分辨率区域,采用垂直投影法确定其必须的最大周向旋转步长,由最小二乘法建立采样旋转步长与产品表面待识别结构尺寸及空间分辨率之间的数学关系模型。实验表明,空间分辨率与旋转步长及待识别结构尺寸的关系模型拟合度0.9211,待识别结构尺寸(x)与旋转步长(y)的关系模型拟合度0.9996,空间分辨率(x)与待识别结构尺寸(y)的关系模型拟合度0.9997,本文所建立模型为空间采样提供了理论指导依据。
关键词:空间分辨率;空间采样;垂直投影法;旋转步长;最小二乘法
中图分类号:TP391.41文献标识码:A
1引言
随着工业技术及人工智能的快速发展,对工业产品检测的自动化和连续化提出了更高的要求。在保证产品有效信息完整获取的情况下,需建立采样旋转步长与产品表面待识别结构尺寸及空间分辨率之间的数学关系模型,提高检测效率的同时保障产品表面完整信息的获取。通过对待测物成像后,获得产品结构信息并对图像进行分析处理,从而准确检测。其中,系统分辨率作为系统综合性能的反映,与系统的构成有关,所以系统分辨率也称为固有分辨率[1]。检测系统的各个组成部分决定着成像系统的分辨率,在实时成像检测中,系统分辨率确定后,则该系统可测试的最小结构尺寸确定。早在2003年曾祥照对射线实时成像系统检测中的图像清晰度与分辨率做了分析,分析检测图像的清晰度与分辨率问题及相互关系[2]。2006年喻春雨等人研究了新型X射线影像增强系统分辨率数学模型[3], 2013年吴鑫对口服液产品质量的机器视觉检测方法进行研究,对口服液视觉检测系统的成像器件和成像方案进行了选型和设计[4]。
然而在上述应用中,在系统分辨率能保证识别最小尺寸的前提下,空間结构采样旋转步长与待识别结构尺寸的相关性尚未做更深入的研究。本文基于空间分辨率对产品周向检测的方位序列图像空间结构采样进行分析,以表面具有可用于分辨率测试的黑白线对的轴对称结构产品为实验对象,研究成像系统对产品表面检测所必须的最大周向旋转角度,由最小二乘法建立采样旋转步长与产品表面待识别结构尺寸及空间分辨率之间的数学关系模型。本文具有方法论的先验指导意义,也是空间结构采样的理论依据。
2空间采样装置
系统空间采样装置图如图1所示[5]。
产品周向图像序列的获取通过不同的成像系统可分为内部装配结构采样与表面结构采样。如产品的内部装配结构采样常用X射线数字成像系统,产品表面结构则可通过获取可见光序图像序列进行采样,但在采样过程中采样算法对不同成像系统获得的图像都具有通用性。本文对一个产品包含多个分辨率区域的采样等价于对多个产品但每个产品只包含一个分辨率区域的采样,选取表面具有可用于分辨率测试的黑白线对的轴对称结构产品进行验证。
3有关分辨率概述
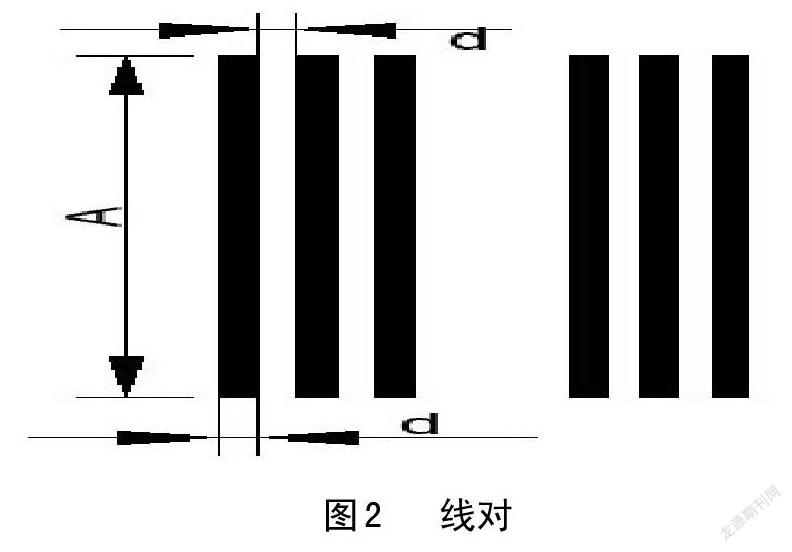
分辨率(resolution)作为描述数字图像质量的重要参数,它是指图像上显示细微物体的能力,通常用可识别的线条能够分离的最小间距表示[6],单位是每毫米线对数(lp/mm或lp/cm)如图2所示。
分辨率包括空间分辨率和灰度分辨率两项指标。空间分辨率是指图像中可辨认的临界物体空间几何长度的最小极限,即对细微结构的分辨率[7]。数字图像的空间分辨率取决于像素尺寸的大小。数字图像的基本单元就是像素(Pixel)。如果把图像放大若干倍可以看到图像实质是由无数个小格组成,把一幅图像按行与列分割成 x×y个网格,就可用一个 x×y的矩阵来表达该图像。
4空间结构采样
乃奎斯特采样定理(Sampling theory)[7]: 是有限带宽的连续信号,其频谱的最高频率为 ,对 采样时,若保证采样频率
则采样后的数字信号 完整地保留了原始信号中的信息,可以由采样信号 无失真地再现原始信号 。根据上述奎斯特采样定理,在固定方位下对产品进行检测,若其最小待识别结构尺寸的有限值为 (cm),那么其相应的最大空间分辨率为1lp/cm(1cm的单位长度上黑白线对数) [8],获取产品的数字图像,若要获取数字图像的完成信息,则要求数字图像的分辨率必须满足 。
5 算法介绍
5.1垂直投影法
由于产品表面具有不同分辨率的待检区域,即每厘米的黑白线对数不同。在各待检区域黑白线对数确定的情况下,采用垂直投影法确定相应的采样旋转角度,该方法本质上是一种统计方法[9]。假设所获取的整体待检区域视场图像大小为 ,目标区域为 ,在视场中选择一个略大于目标区域的定位图像 ,并记下其左上角位置坐标 与右下角位置坐标 。垂直投影即对一列中全部像素点的进行灰度值的累加求和,如式(2)所示:
其中 表示像素所处的位置, 表示该像素点的灰度值信息,通过分析投影图中相邻冲击波谷的位置来确定旋转变化的像素值以及相应的旋转角度。
5.2最小二乘法曲线拟合建模
运用数学方法,由测试统计得出数据,并且把数据描绘出来,同时拟合一条跟已有的图像最接近的曲线,来表示数据间的某种关系[10]。此方法称为最小二乘法,即选择参数P1,P2,使得全部观测的残差平方和最小。用数学公式表示为[11]:
将上式整理后,对m+1个方程进行联立,同时求解 得到待定系数,从而得到多元线性预测公式。特别地当n=1时, 的估计公式为:
上式即为最小二乘法预测模型,Yt为预测值,n为数据点个数。
5.3 模型检验
经过多次测试得出有意义的方程,同时必须用数学方法进行拟合效果和显著性相关检验,如下式:
本文通过对含有缺陷的10个不同分辨率区域检测,对上述方法建立的采样旋转步长与先验已知的待检测产品表面结构尺寸及空间分辨率分辨率之间的数学关系模型进行验证,分析正确检测率来判断模型的可靠性。
6. 实验结果与分析
本实验以表面具有不同分辨率区域且底圆直径为8.3cm的圆柱形产品为例进行实验,所用相机为佳能600D,有效像素为1800万,其图像的像素大小为684×345。实验仿真平台为matlab2012b。
由先验知识,产品表面10个区域且每个区域宽度5cm,空间分辨率分别为1lp/cm、2lp/cm 、3lp/cm、 4lp/cm、 5lp/cm、 6lp/cm、 7lp/cm、 8lp/cm、 9lp/cm、 10lp/cm,即10个区域的待识别结构尺寸(每对黑白线对)分别为1cm、1/2cm、1/3cm、1/4cm、1/5cm、1/6cm、1/7cm、1/8cm、1/9cm、1/10cm。如图3所示。
为实现方位序列图像空间结构采样,首先需确定不同分辨率区域最大周向旋转步长。对待检区域1((a),(b))采用垂直投影法的效果如图4所示。
针对分辨率为1lp/cm待检区域1,为准确确定待检区域的旋转角度,经过20次实测数据分析得出,在垂直投影图中当相邻冲击波谷间的距离大于等于48pixels时,出现一对完整的黑白线对,此时旋转角度为14°。对区域2,…,区域10,采用相同的方法得出相应的旋转角度,如表1所示。
对于区域1的检测,需对产品每旋转15°进行采样,周向360°空间方位采样点个数24,即获取24幅图像。对于区域2的检测,需对产品每旋转11°进行采样,周向360°空间方位采样点个数为33,即需获取33幅图像。同理,针对同一产品表面具有多个不同分辨率的待检区域,为了实现对最小结构尺寸的精确检测,系统固有分辨率需满足可以识别最小结构尺寸的最低要求。以实验产品为例,检测此产品所需成像系统的固有分辨率需达到10lp/cm,因此空间采样点个数受限于系统固有分辨率。
采用最小二乘法建立采样旋转步长与空间分辨率之间的数学关系模型。其中R2代表曲线拟合的相关指数,即拟合度,R2等于相关系数的平方值,介于0到1之间,此值越接近于1说明拟合效果越好,精度越高。拟合函数及参数如表1、表2、表3所示。
5 结论
为了实现产品周向方位检测,本文研究方位序列图像空间结构采样方法。在系统固有分辨率保证能识别最小结构尺寸的前提下,建立空间采样频率与成像系统固有分辨率与先验最小待识别尺寸的关系模型,保障产品表面完整信息的获取。有助于加速机器视觉检测技术在自动识别领域的应用,为实际的工程检测奠定了良好基础。
参考文献:
[1] Que W, Rowlands J A. X-ray imaging using amorphous selenium: inherent spatial resolution[J]. Medical physics, 1995, 22 (4):365-74.
[2] 曾祥照.射线实时成像系统检测中的图像清晰度与分辨率[J].无损检测,2003;25(3):133-138.
[3] 喻春雨,常本康,魏殿修.新型X射线影像增强系统分辨率数学模型[J].光电工程,2006;33(11): 120-122.
[4] 吴鑫.口服液产品质量的机器视觉检测方法进行研究[D].湖南大学.2013,16-25.
[5] 徐青,韩跃平,杨志刚.基于变步长采样的产品表面缺陷检测研究[J].激光與光电子学进展,2013;50(9):091203.
[6] Miloud Chikr El-Mezouar.Vegetation extraction from IKONOS imagery using high spatial resolution index [J]. Journal of Applied Remote Sensing, 2011, 5 (1):053-543.
[7] 韩跃平.复杂产品内部结构装配正确性X射线自动检测技术研究[D].太原中北大学。2009.16-26.
[8] 徐青.圆投影及直方图不变矩在多视角产品检测中的应用[J].现代工业经济和信息化,2016.10-24.
[9] 陈正龙,徐晓秋.基于非线性曲线拟合的温湿度测量数据处理方法[J].电子设计工程,2013;21(12):92-94.
[10] Ahmad Bilfarsah. Efectivity of Additive Spline for Partial Least Square Method in Regression Model Estimation[J]. Makara Seri Sains, 2005, 09 (1):28.
[11] 陈伟.客户协同产品设计中的多主体冲突消解研究及应用[D].重庆大学。2013.5.1.
作者简介:赵静(1987- )女,山西宁武人,硕士研究生,助教。研究方向:智能识别。
猜你喜欢
中国新通信(2016年22期)2017-01-13 09:51:55
计算机应用(2016年12期)2017-01-13 01:38:09
合作经济与科技(2017年1期)2017-01-03 22:21:29
电脑知识与技术(2016年27期)2016-12-15 20:30:53
中国科技博览(2016年26期)2016-10-24 18:25:32
科技视界(2016年22期)2016-10-18 17:12:13
中国科技博览(2016年16期)2016-09-19 20:18:15
财税月刊(2016年5期)2016-08-03 21:07:28
商(2016年20期)2016-07-04 01:23:26
考试周刊(2016年27期)2016-05-26 23:45:13
