
某地铁列车ATO模式启动冲击超限故障分析与解决
2019-09-10 08:38李如石任富争
铁道机车车辆 2019年4期
李如石, 任富争, 刘 超
(中车唐山机车车辆有限公司 产品研发中心, 河北唐山 063035)
城市发展集中在城市中心区,交通阻塞、乘车难也主要反映在城市中心区。地铁轨道交通运量规模大、受干扰小,能够做到快速、正点运行,是运行大城市客流运输的有效手段。为了实现列车安全、快速、正点运行的目标,必须采用安全、稳定、可靠的行车运行控制系统,以保证故障灾情的及时排除和行车误点的及时纠正。随着科学技术的发展,城市轨道交通ATC(列车自动控制)系统得到了全面的发展,计算机网络、信息通信、自动控制等技术在ATC系统中得到了广泛的应用,ATC系统不但完成对列车速度的自动监控,保证列车的安全,而且能够指挥行车,提高运营效率[1]。某城市地铁车辆在正式运营期间,频繁发生:ATO模式控车启动时,伴有较大启动冲击,严重影响乘坐舒适度,增大旅客乘坐危险性。根据地铁运营公司统计,该故障发生概率大约为20%,较为频繁,已经影响到列车运营管理,运营公司召开相关会议,要求车辆方与信号方尽快分析原因并解决。
1 故障分析
1.1 定位故障系统
采集列车数据记录仪数据,根据司机反馈故障发生的时间,进行数据解析并进行分析,发现故障发生时,报出“牵引封锁7(牵引工况下,气制动未缓解且“气制动缓解旁路”无效超5 s)”故障,发生牵引封锁7的原因为,牵引力发挥较慢导致5 s时气制动仍未缓解,从而网络系统进行了牵引封锁。信号系统检测到列车没有启动后取消牵引指令,短暂几秒后再次牵引启动,此时由于牵引级位增大,从而导致启车时冲击较大。
进一步分析数据,发现网络系统发送给牵引系统的牵引指令没有丢失,但牵引系统发挥的牵引力较慢,将
该问题反馈给牵引系统供应商,牵引系统供应商分析相关数据后,反馈网络系统发送的牵引指令发生了异常,现象为:网络系统发送30 ms牵引指令后,主动撤销牵引指令(此时硬线牵引指令仍存在),再过30 ms后又再次发送牵引指令。牵引逆变器收到牵引指令后启动,牵引指令撤销后,牵引逆变器停止,当牵引逆变器再次收到牵引指令若想再次启动时,需要等待3 s的时间,故而导致牵引力发挥较慢,最终导致列车牵引封锁。具体见图1所示。
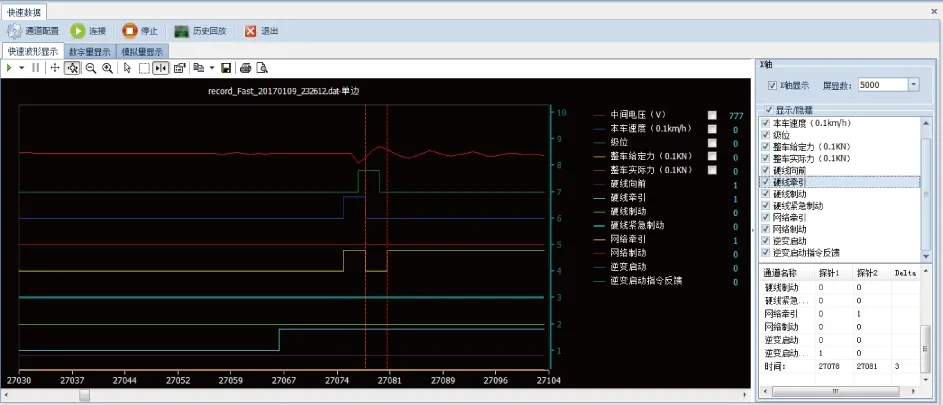
图1 牵引系统采集故障数据
牵引系统能够采集到牵引指令丢失,而网络系统采集不到,究其原因为,数据记录仪采集数据的时间周期为100 ms,但是丢失牵引指令的时间为30 ms,导致数据记录仪没有采集到牵引指令丢失,而牵引系统采集数据的时间周期为10 ms,能够采集到牵引指令丢失。
从图1可看出,当网络系统发送的牵引指令丢失时,硬线牵引指令没有丢失,从而确定故障是由网络系统丢失牵引指令引起的,而非牵引系统和信号系统。
1.2 故障系统分析
导致ATO模式启动冲击较大的原因为网络系统丢失牵引指令。为了查找故障原因,搭建半实物仿真测试平台,模拟现场运行环境。半实物仿真平台包括车辆控制单元VCU、人机显示单元HMI和仿真子系统(包括牵引系统DCU、制动系统BCU等)。用MVB总线分析仪采集MVB总线数据,如图2所示:0xA0为网络发送给2车DCU的端口数据,红色框内的0102表示发送给DCU牵引指令无效,0502表示发送给DCU牵引指令有效,从图2中可以发现牵引指令掉了2次,复现了列车正线运营的故障情况。
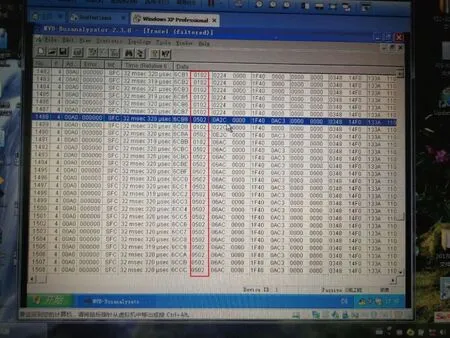
图2 牵引指令异常数据显示
为了解决牵引指令丢失问题,对网络系统VCU程序进行分析,当满足下列所有条件时,网络系统才会发出牵引指令:
(1)接收到硬线IO的牵引指令有效;
(2)无紧急制动;
(3)无快速制动;
(4)无常用制动;
(5)无牵引封锁。
具体逻辑如图3所示。
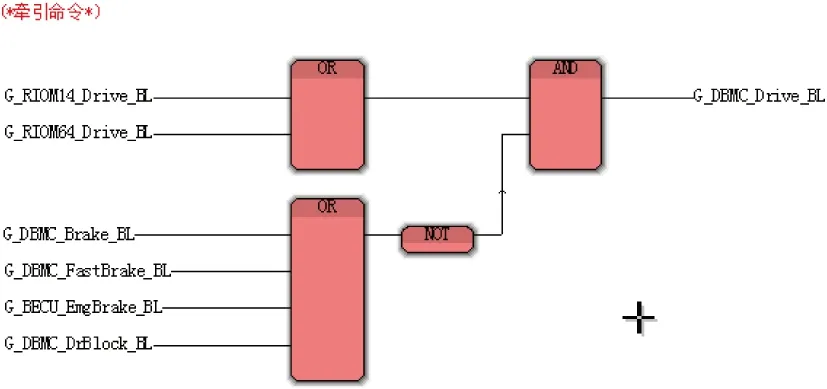
图3 牵引指令逻辑
修改VCU程序,将所有牵引指令的输入条件都放到给DCU的端口中,发现牵引封锁指令有异常,由于引起列车牵引封锁的条件很多,又将牵引封锁的输入条件都放到给DCU的端口中,最终发现牵引封锁条件之一的“ATP未切除时,无ATP牵引使能指令”有异常,此部分逻辑见图4。ATP牵引使能逻辑见图5。
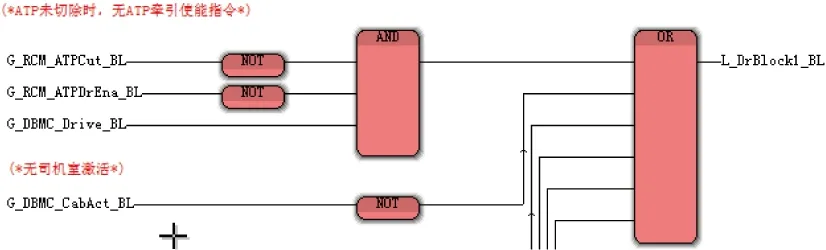
图4 牵引封锁逻辑1
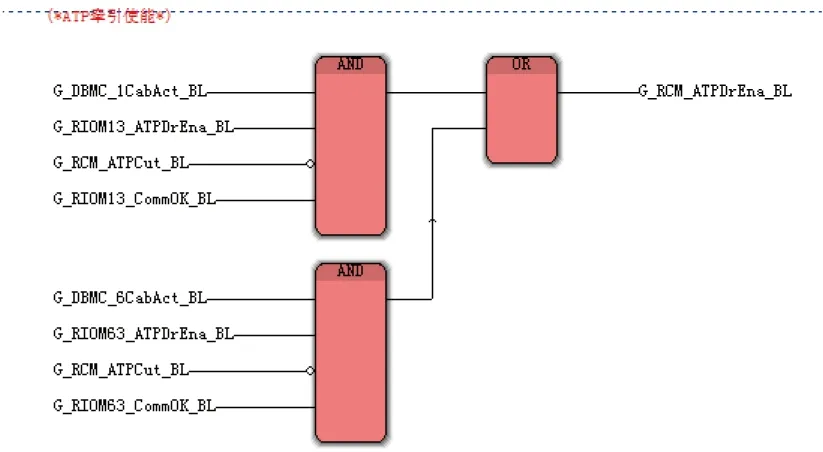
图5 ATP牵引使能逻辑
将图5中ATP牵引使能的输入放在DCU的输出端口中,发现是由“IO硬线ATP牵引使能”发生异常引起的。根据现象初步分析判断,在ATO模式牵引过程中,硬线“ATP牵引使能信号”是由0变成1,可能影响到信号系统牵引使能判断工作单(RCMIn),牵引封锁工作单(DrBlock),牵引指令工作单(DrBrCtrl)相关指令的变化。
对这3个工作单和输出给DCU的工作单(DCUO_T32)进行分析,发现如下现象:
(1)对于任务周期中工作单的顺序从上到下依次为:输出给DCU的工作单(DCUO_T32)→牵引指令工作单(DrBrCtrl)→牵引封锁工作单(DrBlock)→硬线IO输入工作单(RIOMI_T32)→信号系统牵引使能判断工作单(RCMIn);
(2)信号系统牵引使能判断工作单(RCMIn)的执行周期为128 ms,其余工作单的执行周期为32 ms;
初步怀疑是程序中对于任务执行的时序问题,对工作单进行如下调整并测试:
调整牵引使能判断工作单(RCMIn)设置的任务周期,由128 ms变为32 ms,并调整32 ms任务中工作单的顺序,即:硬线IO输入工作单(RIOMI_T32)→牵引使能判断工作单(RCMIn)→牵引封锁工作单(DrBlock)→牵引指令工作单(DrBrCtrl)→输出给DCU的工作单(DCUO_T32)。
调整后连续测试300次左右发现不丢失牵引。
1.3 故障原因定位
通过以上分析及测试,确定故障原因为:网络系统程序工作单的任务周期设置和顺序不合理,从而导致牵引指令输出异常。
2 解决方案
基于以上分析,提出如下解决方案:
(1)对同一个任务周期内的工作单执行顺序按照:输入→逻辑→输出,进行排列;
(2)对于某些牵引封锁逻辑判断需考虑信号传输延时或采集误差加入滤波处理。
具体实施为:
(1)调整信号系统牵引使能判断工作单(RCMIn)设置的任务周期,由128 ms变为32 ms,并调整32 ms任务中工作单的顺序,即:硬线IO输入工作单(RIOMI_T32)→牵引使能判断工作单(RCMIn)→牵引封锁工作单(DrBlock)→牵引指令工作单(DrBrCtrl)→输出给DCU的工作单(DCUO_T32);
(2)牵引封锁指令输出前增加1 s的滤波处理。
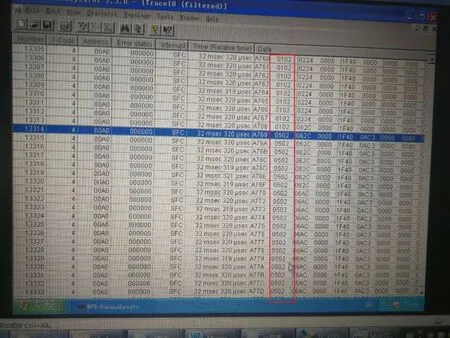
图6 试验室仿真——牵引指令正常数据显示
经过上述逻辑处理后,在仿真试验台进行了大约300次左右的试验,没有再发生牵引指令丢失的情况,测试结果如图6所示。
在试验室测试完成后,又在列车上进行了一个月左右的现场测试,没有再发生因牵引丢失引起的ATO模式启动冲击过大的问题,问题得以解决,现场测试结果如图7所示。
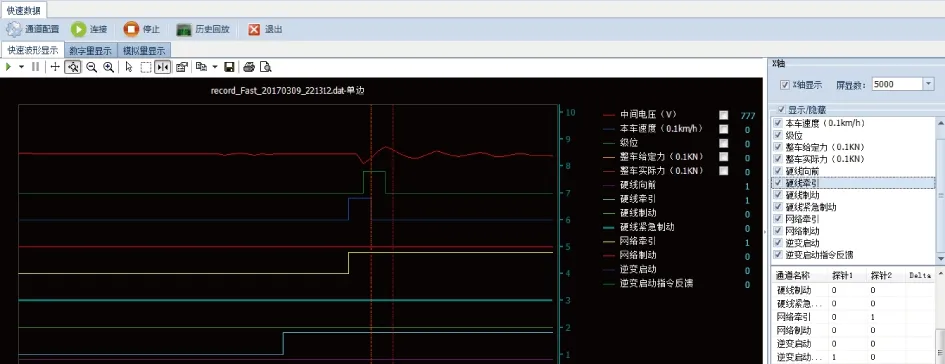
图7 现场测试——牵引指令正常数据显示
3 结束语
针对ATO模式下列车启动冲击较大的问题,着重介绍故障分析过程,从而确定引起该故障的原因,并提出解决方案,经过现场试验验证,效果良好,已完全解决该问题。
猜你喜欢
建材发展导向(2021年18期)2021-11-05
铁道通信信号(2020年1期)2020-09-21
新世纪智能(高一语文)(2020年5期)2020-07-24
铁道通信信号(2020年8期)2020-02-06
科学与信息化(2020年36期)2020-01-04
铁道通信信号(2019年5期)2019-10-10
中国交通信息化(2019年7期)2019-10-08
军事运筹与系统工程(2017年1期)2017-07-31
客车技术与研究(2014年5期)2014-02-28
军事历史(2004年3期)2004-11-22
