基于CAN总线的电动机保护装置软件系统设计与研究
2019-09-10 07:22朱山川
赤峰学院学报·自然科学版 2019年12期
朱山川



摘要:针对工程应用中电动机存在的保护问题,对三相异步电动机保护装置的软件系统进行了设计与研究.该保护装置采用嵌入式芯片进行硬件设计,基于can总线进行通信,配套的软件系统结构上都采用了模块化设计,主要的保护功能由中断来实现.经过工程应用检测,该保护装置软件系统保护功能齐全,选择性、可靠性、灵敏性和快速性较好.
关键词:电动机保护;can总线;软件系统
中图分类号:TP273.5 文献标识码:A 文章编号:1673-260X(2019)12-0054-03
1 绪论
我国经济快速发展中,电力企业为各项生产生活提供电力支持,而电动机是电力系统中基础性设备,其在电力能源中占有重要地位[1].由于实际使用中的电动机在设计时容量与电动机重量体积相比,比值差距越来越大,这导致电动机的耐热能力下降,这对电动机的保护要求越来越高.在实际生产中,电机一旦出现故障,会导致设备甚至整个生产线都不能正常运行,轻则造成停机、停产,重则出现人员伤亡[2].利用DSP技术实现电动机保护多功能和智能化已成为今后发展的方向[3].本项目针对电动机的保护问题设计了一套嵌入式系统构成保护装置,并为保护装置设计了配套的软件系统,通过软件系统通过中断实现了主要的保护功能,充分保证了系统要求的实时性.
2 电动机保护装置的总体设计
本项目将电动机保护装置设计整体上分为保护、测量、控制、通信以及录波模块.核心部分采用Freescale系列数字信号处理器56F807以及附属模块来构成装置最重要的采集模块,实现对电压、电流以及频率信号的采集、A/D转换、处理、判断以及信号量的开出,来控制继电器的操作,进行跳闸或者合闸;以单片机W78E516为核心构造LCD显示模块和传输模块,传输模块主要包括数据通过CAN总线传输到后台CPU以及后台CPU对这些数据进行储存、分析、结果显示以及打印,如果需要的话,通过后台CPU对参数进行设置,以达到控制的最优.装置整体设计框图如图1所示.
3 电动机保护装置的软件系统设计
3.1 算法选择
在微机保护装置的软件设计中,主要考虑的是交流采样算法、保护算法[4].
本项目的保护装置软件系统是根据保护工作原理和动作要求来编写程序的,以继电保护算法数学表达式来实现.选用的算法包括电流、电压幅值计算的傅里叶算法、相间短路电流算法、低电压保护算法等.由于微机保护的动作由程序决定,易于实现某些复杂形状的动作特性;同时利用计算机的记忆功能,能够自适应系统的运行状态,保留事件记录,便于故障后保护动作行为的分析;除此之外,由于采取数字运算方式处理电气量,避免了传统电气、机械元件引起的各种误差,提高了保护精度.
3.1.1 各相电流、电压幅值算法
采样算法有很多种,考虑到精度和速度的因素,其中全波傅氏算法具有较高计算精度,且具有滤波作用,能够滤除直流分量和高次谐波,非常适合本系统的实际情况,因此采用此算法[5].同时本设计充分利用硬件芯片56F807主频较高,可保障复杂算法的时间要求,因此结合算法的复杂性和时间问题,最终确定采用傅里叶滤波算法.
同样,电流基频分量的傅里叶余弦系数、正弦系数和复数形式的算法与电压基频分量相关算法类似.
3.1.2 数据收发中算法的选择
本项目数据收发过程中采用循环冗余码(Cyclic Redundancy Check Code)CRC算法进行校验,结合DSP56F807的实时快速的处理能力,可大大提高保护装置通信系统的快速性和可靠性.
本设计中选用是CRC-16多项式G(x)=x16+ x15+x2+1,利用56F807中带反馈的移位寄存器实现CRC多项式除法来实现.
4 保护装置的软件设计
电动机保护装置采集各节点的电压、电流、频率等现场信号,并计算幅值、相位、相序等参数,判断工作现场的各个参数值是否超过保护定值,即判断出是否发生短路、短路以及断相等故障.并通过CAN总线将数据发送到上位机,上位机进行存儲、故障专家认定并提供打印.
4.1 主程序设计
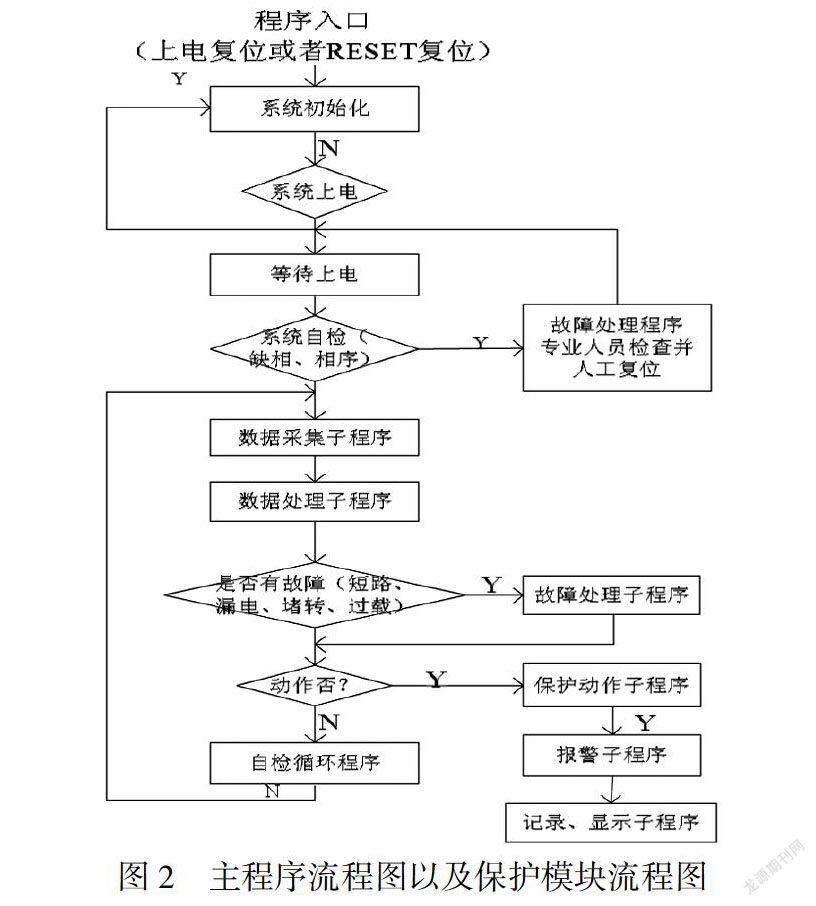
进行模块化设计是本保护装置软件系统设计的特点,软件系统主要分为三个部分:初始化模块、系统控制模块和通信模块.在设计时采用主程序模块和中断子程序模块相结合的方法,主程序流程图以及保护模块流程图如图2所示.
4.2 主程序与各个服务程序软件结构设计
主程序与采样中断服务程序以及保护逻辑、跳合闸程序之间的结构设计如图3所示.
保护装置的中断采用定时采样中断,系统响应中断后,进入采样中断程序入口地址,开始采样、数据处理.如果没有故障报警,在采样中断程序结束后自动转入执行中断程序开始时被中断的主程序,如果发现了被保护的线路或者装置存在故障,则不返回到原主程序,而是修改中断返回地址,强制性使中断服务程序结束后进入故障处理程序.但是在执行故障处理程序时,定时进入采样中断服务程序是不能停止的,而这时的标识位KST=1,则不返回到主程序,而是继续执行故障处理程序,这样是保证采样得到的数据一直是最新的、实时的,也就是保证了保护的实时性、避免了误动作.故障处理程序结束后,程序返回到主程序;保护逻辑部分不动作也将返回到主程序的自检循环部分.
4.3 具体保护软件程序设计
由于保护装置的硬件各个基本模块都大致相同,主要是由数据采集系统、CPU主系统以及开入开除模块组成,主要是各个模块的地址分配、接口的控制方式等不同,由此产生功能不同、原理不同的微机保护,因此,将算法与程序相结合,并安排合理的程序结构是实现保护功能的关键.在各种保护中,相间短路电流保护是非常普遍也是非常重要的一种保护,以相间短路电流保护软件程序设计为例,具体保护程序流程图以及中断子程序如图4所示.
4.4 数据开出软件设计
在开关量输出回路中,利用软件通过串入/串出或者并出的八位移位寄存器74HC595接口来控制有接点继电器,在移位过程中,输出端的数据保持不变.具体实现程序如下所示:
5 总结
本项目的保护装置软件系统是根据保护工作原理和动作要求进行了计算程序的编写,以继电保护算法来实现功能.选用的算法包括电流、电压幅值计算的傅里叶算法、相间短路电流算法、低电压保护算法等.由于微机保护的动作由程序决定,易于实现某些复杂形状的动作特性;同时利用计算机的记忆功能,能够自适应系统的运行状态,保留事件记录,便于故障后保护动作行为的分析;除此之外,由于采取数字运算方式处理电气量,避免了传统电气、机械元件引起的各种误差,提高了保护精度.通过实践操作,本项目所设计软件系统处理速度快,课随时处理中断响应,实时性功能良好.
参考文献:
〔1〕张茜.电力系统中电动机智能保护系统探索[J].职大学报,2019(2):87-90.
〔2〕苏晓丹,记志成.感应电机定子匝间短路故障建模与仿真研究[J].大电机技术,2007(6):16-20.
〔3〕洪广焦.基于共享RAM的电动机保护装置的设计[J].电子测试,2019(21):5-16.
〔4〕王旭彬.关于电动机微机保护设计中DSP处理器的应用[J].科技信息,2013(19):181-184.
〔5〕杨立生.基于DSP的电动机智能保护模块的设计[J].现代电子技术,2015(5):101-102.
猜你喜欢
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
科技创新导报(2016年21期)2016-12-17
科技视界(2016年18期)2016-11-03
科教导刊·电子版(2016年15期)2016-06-25
无线互联科技(2015年9期)2016-03-05
黑龙江教育学院学报(2015年3期)2015-05-12