基于无线网的复杂控制系统设计及实现
2019-09-10 07:22李媛任俊杰
北京联合大学学报 2019年2期
李媛 任俊杰




[摘要]应用Zigbee协议设计无线传感网络,采用Labview软件编写PID控制和模糊控制程序,将无线传感网与Labview软件相结合,设计了基于无线网的采集和控制
系统,解决了某些现场设备难以布线、某些移动产品的实时检测等问题;被应用于三容水箱液位的实际控制中,取得了非常好的控制效果。
[关键词]无线网;Labview;Zigbee协议;三容水箱;控制算法
[中图分类号]TN 925.93[文献标志码]A[文章编号]1005-0310(2019)02-0019-05
Abstract: Wireless sensor network using the Zigbee protocol is established. The PID control and fuzzy control program using Labview software is designed. Combing the wireless sensor network with Labview software, we have designed the acquisition and control system based on wireless network. Some problems such as difficulty in wiring and real-time detection of some mobile products are solved. The system has been applied to the actual control of the water level of the three-capacity tank and has achieved a very good control effect.
Keywords: Wireless network; Labview; Zigbee; Three-capacity tank; Control algorithm
0引言
无线传感器网络(WSN)是具备信息采集、信息传输与信息处理等功能的综合系统,目前,被广泛应用于军事国防、城市交通、环境监测等诸多领域[1]。随着无线传感网硬软件技术的飞速发展,以无线网为平台,研究复杂多变量工业过程的智能控制系统得到应用,在难以布线的生产现场,可以采用无线收发的形式获得数据,进行控制;也可以将工况实时反馈到手机等移动智能终端,提升生产、制造过程的透明性、敏捷性、容错性,达到对生产过程全方位的跟踪、分析、优化和控制,确保生产、制造执行过程的高效、健康运行。
三容水箱是较典型的非线性时延对象,也是基于工业过程的物理模拟对象,系统的参数有液位、流量、压力等,可以实现系统的多种控制形式。而工业上许多被控对象都可以被抽象成三容水箱的物理模型,如工业锅炉、石油化工等液位控制,因此三容水箱非常具有代表性,它的工业背景也很强,研究三容水箱的控制系统具有实际意义。本文以三容水箱为被控对象,采用Zigbee协议搭建无线传感网,采集、传输三容水箱的液位值,用Labview软件接收数据,并采用PID和模糊控制算法实现液位的闭环控制。通过系统实际调试和运行,得到了满意的控制效果,为自动化系统无线传输及控制提供了基础数据。
1系统结构
系统被控对象是三容水箱,采用Zigbee模块组成无线网,实现数据传输,上位机Labview软件接收三容水箱的液位数据,进行数据处理、显示,并发出信号以控制水箱执行器,实现水箱液位控制。系统结构如图1所示,图中虚线表示无线信号传输。
Zigbee模块根据所处位置和功能的不同,可以分为终端节点模块、路由模块和协调器模块。Zigbee终端节点模块与三容水箱的液位信号连接,并通过无线方式传递给路由节点(根据实际情况可以有多个),再由路由节点传递给协调器,由上位机读取并处理;控制信号反之,由上位机发出,通过协调器和路由节点,传输给终端节点,控制进水量。
Zigbee模块尺寸约为6 cm×8 cm,比较小巧,因此网络的实际布置及安装非常简单方便:终端节点模块直接与三容水箱相连,协调器模块直接插在USB口与上位机连接,路由模块应根据被控对象与控制器之间的距离、环境因素以及Zigbee模块的无线发射功率大小,确定网络中需要配置的数量。这些路由模块固定于被控对象与控制器之间的某处或物体表面即可,出于降低模块使用功耗的需求,一般2个Zigbee模块之间的无线传输距离最好小于100 m。
1.1三容水箱
QXLTT三容液位控制实验装置是一台具有多个输入和多个输出的非线性耦合被控物理模型。实验装置的主体是由用透明的有机玻璃制成的3个圆形容器罐和1个蓄水池,并配以相应的执行机构和传感器组成,包括2个水泵P1和P2、6个手动阀V1~V6、2个PWM(脉宽调制)型线性比例调节阀V7和V8以及2个旁路阀V9、V10,如图2所示。图中T1、T2、T3分别表示1#、2#、3#水箱的液位值,由3个反压式液位传感器测得。
1.2Zigbee模块
Zigbee模块作为无线网络中的节点,与其他同类节点通过无线方式进行数据交流。本文中的无线网络协议采用ZigBee协议,是IEEE 802.15.4美国电子与电气工程师协会标准。Zigbee是一种新兴的短距离、低速率的无线网络技术,主要用于近距離无线连接。它有自己的协议标准,在数千个微小的传感器之间相互协调实现通信,具有自组网功能。Zigbee模块集成有两个CPU,其中STM32F107芯片用于信号的采集,另一个CC2530芯片用于信号的无线传输。
信号采集芯片——STM32F107芯片的标准外设包括10个定时器、2个12位1-Msample/s AD、2个12位DA(数模转换器)、2个I2C接口、5个USART接口和3个SPI端口和高质量数字音频接口IIS,另外STM32F107拥有全速USB(OTG)接口、两路CAN2.0B接口以及以太网10/100 MAC模块。
无线发送芯片——CC2530模块使用增强型8051内核,每个指令周期是一个时钟,相对于其他通用的8位微控制器来说,它有更加丰富的资源以及更快的速度,主要包含单周期的8051兼容内核、8KB的SRAM以及32/64/128/256KB的闪存,两线调试接口允许对片上闪存进行编程,通过不同的运行模式使之能低功耗运行。
2系统组网及数据传输
无线传感网通常由多个Zigbee模块组成,结构如图1所示。在同一网络中协调器只能有1个,用于组网、与PC机进行数据通信,其余Zigbee模块可以设置为路由器或终端模块,用于发送或接收信息。本文采用4个Zigbee模块进行组网,终端模块和协调器分别与被控对象和上位机相连,其余2个路由模块按一定的距离置于实验室的桌上。
2.1网络软件设置
Zigbee协议工作于2.4G频段[2],共有16个信道,定义为通道11~通道26。本文应用4个Zigbee模块进行组网,采用Mesh网结构,应用2.4G的通道11作为无线信道,网络的PANID取为2111。其中,与PC机通过串口连接的Zigbee模块是协调器,其余3个Zigbee模块设置为路由器功能;路由器中与被控对象连接的Zigbee模块具有采集和无线传输功能,其余2个Zigbee模块只具有传输功能。
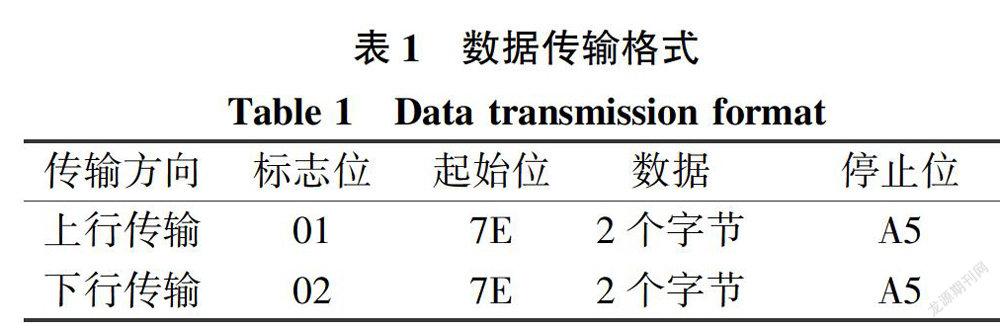
按照数据信号的传输方向,将数据传输定为上行和下行传输,即由水箱向PC机的传输方向是上行数据传输;由PC机发出指令给水箱的执行器是下行数据传输。数据传输格式如表1所示。
2.2數据采集和无线发送
以上行传输为例,数据采集和无线发送过程分为3个阶段,下行传输原理相同。
2.2.1对水箱液位信号的采集及传输
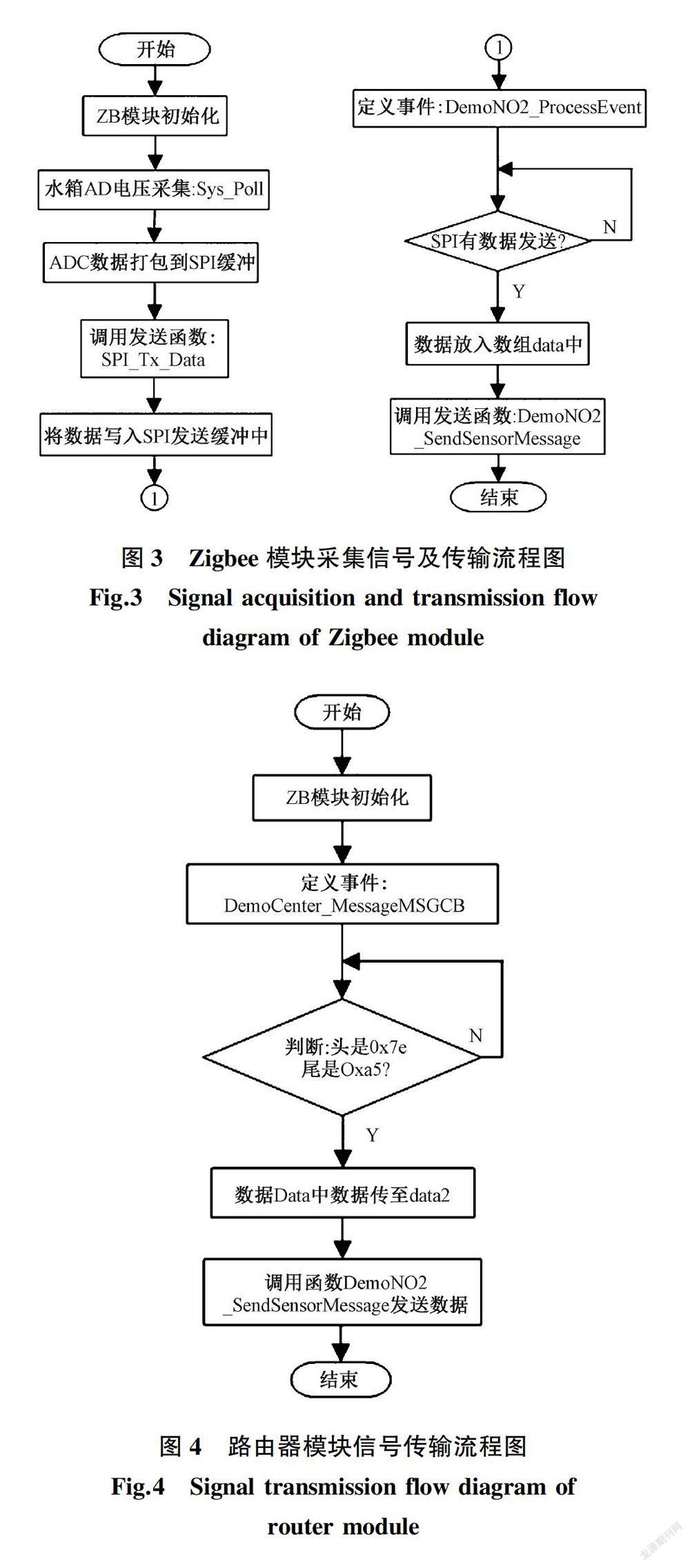
三容水箱的反压式液位传感器输出4~20 mA的电流值,Zigbee模块中STM32F107芯片采集水箱液位信号,通过DMA方式将采集结果存放到内存中的某一地址单元;然后通过内部串口SPI传至CC2530芯片,CC2530接收到数据后无线发送给路由模块,程序流程如图3所示。
2.2.2信号通过路由器无线传输
通过Mesh网络,采集模块发送的信号由路由模块传送给协调器模块,程序流程如图4所示。
2.2.3协调器接收数据并通过串口传输给PC机
PC端Zigbee模块是无线网的协调器,接收路由模块发来的数据。协调器中的CC2530芯片将接收来的数据传给该模块中的STM32F107芯片,并通过PC机串口将数据传输给PC机,其程序流程如图5所示。
2.3PC机串口接收
PC机采用Labview软件接收协调器采集数据,并对数据进行处理[3],在Labview环境下,开发PID算法和模糊控制算法的前后面板程序,实现液位控制,具体流程如图6所示。
3系统实施及运行效果
向Zigbee模块下载相应的程序,运行显示组网成功。将采集模块与三容水箱连接,协调器模块与PC机连接,运行Labview软件,控制对象结构如图2所示,将手动阀V1和V5打开,V2和V4关闭,使1#水箱与2#水箱连通,形成双容系统;通过控制变频器改变P1水泵的进水量,实现对三容水箱中的2#液位进行调节。因为进水泵是直接给1#水箱进水,再通过连通阀V1进入2#水箱,因此对2#水箱的液位控制具有时延性。本系统是具有时滞特性的复杂控制系统。
3.1PID控制
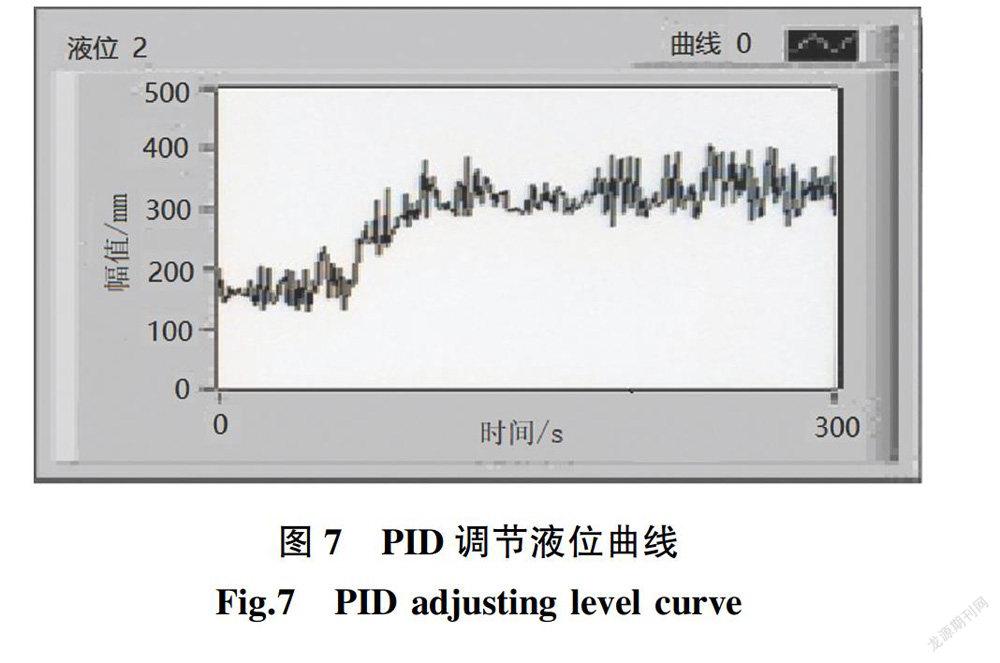
采用PID算法实现液位控制,当PID控制输出为0时,发送数据最小值为3 030,对应控制电压为0 V,表示电磁阀开度是最小;当PID控制输出为100时,发送数据最大为4 646,对应控制电压为5 V,表示电磁阀开度最大。
2#液位给定值为300 mm,系统通过无线传感网不断采集当前液位值,与给定值形成偏差,实现PID控制,使液位的实际值达到给定值。PID调节液位曲线如图7所示。
3.2模糊控制
模糊控制是对误差e和误差变化率ec作为输入信号[4],经模糊化、模糊控制规则运算和反模糊化处理之后形成控制信号输出值,对进水阀门进行调节。模糊控制输出信号范围为0~255,即16进制的00~FF。其中00表示电磁阀开度为最小的时候,FF表示电磁阀开度为最大的时候,00与FF之间的不同数据表示电磁阀开度的大小程度。通过调节电磁阀开度,调节进水量,实现定制控制。
由图7和图8可以看出,PID控制和模糊控制都能够实现对实际系统的有效控制。但模糊控制与PID控制相比,产生的超调量比较小,调节时间比较短,鲁棒性会更强[5]。模糊控制可以让电磁阀更平稳有效地工作,同时它还会降低水位的波动所引起的干扰,从而提高控制系统的可靠性。因此,对于具有多变量、大滞后等特点的非线性系统而言,模糊控制更为有效。
4结语
通过无线传感网信号传输,结合Labview软件,可以实现复杂系统的有效控制;同时,也验证了在无线网络控制系统中,模糊控制算法的控制效果优于PID控制方法。因此将无线网络、有线网络相结合,用于环境复杂、不便于布线的生产现场,可以实现无线数据传输和系统控制,从而降低了工人的劳动强度,改善了操作环境,减少了资源消耗;该方法还可以应用于其他行业,具有广泛的推广价值。
[参考文献]
[1]王新智,胡晓颖.无线传感器网络应用技术研究[J].科技资讯,2013(32):27.
[2]林喜辉.无线传感器网络应用技术研究[J].计算机与网络,2013,39(17):59-61.
[3]徐晓东, 郑对元, 肖武. LabVIEW 8.5常用功能与编程实例精讲[M].北京:电子工业出版社,2009.
[4]张永胜,高宏力,刘庆杰. 基于LabVIEW的模糊控制系统设计[J].仪表技术与传感器,2012(3):27-29.
[5]何春华,蔡志岗.基于LabVIEW的模糊PID控制系统[J].仪表技术,2010(7):57-59+62.
(责任编辑白丽媛)
猜你喜欢
少年文艺·我爱写作文(2021年2期)2021-01-11
中国测试(2018年9期)2018-05-14
中国新通信(2017年9期)2017-05-27
课程教育研究·学法教法研究(2016年22期)2016-10-31
科学启蒙(2016年7期)2016-08-06
电脑知识与技术(2016年11期)2016-06-17
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29