
基于BP神经网络的船舶自动舵自适应控制研究
2019-09-09 08:14蔡建邦
数码世界 2019年5期
关键词:BP神经网络
蔡建邦

摘要:最常规的自动舵是PID自动舵,其设计参数是根据船舶自身的航速、船长、船宽、满载吃水、方形系数、重心距离、舵叶面积以及航行海况来确定的,这种调节方式对船舶所处环境发生变化的适应能力较差。因此尝试用先进的智能控制理论结合常规PID算法进行船舶自动舵的设计,提高船舶自动舵对环境变化的适应能力,以实现非线性控制、动态响应快、鲁棒性强、超调小等特点,提高控制性能。
关键词:自动舵 模糊PID控制 BP神经网络
一、常规自动舵
PID控制方法是最广为应用的控制方法,针对不同控制对象在基于反馈环节的闭环控制下均有较好的控制效果,是各种控制器的核心,被成熟地运用到船舶自动舵的控制中,使自动舵控制得以长足的发展,尽管产生的年代已久仍以其成熟可靠的性能以及相对低廉的造价被大多数海船采纳使用。其中,r(t)为期望值,y(t)为实际输出值,e(t)=r(t)-y(t),e(t)为偏差值,u(t)则为e(t)经过PID控制运算后的控制输出,u(t)用数学语言可表示为:
其中,Kp,Ki和Kd是比例系数,积分系数和微分系数。
關于比例系数Kp,系统的超调量随着Kp的增加而增加,糸统响应速度随Kp的增加而增加,但系统的稳定性由于Kp的增加而恶化。对于积分因子Ki,系统的过冲随着Ki的增加而减小,并且系统的响应速度随着Ki的增加而减速。关于微分系数Kd,系统的超调量随着Kd的增加而增加,并且响应速度随着Kd的增加而减小。
二、模糊自适应自动舵
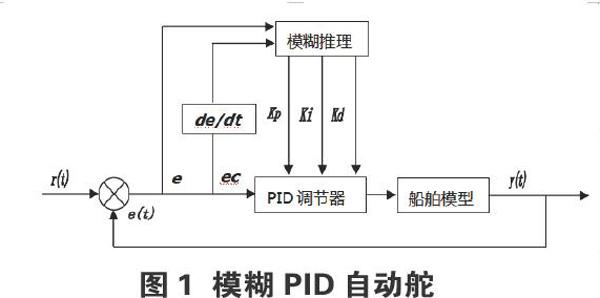
模糊控制是通过PID自动控制规律作为船舶模型的输入,将获取的船舶航向偏差和偏差变化率作为模糊控制的输入。比例系数Kp,积分系数Ki和微分系数Kd根据预设的模糊规则进行调整,PID系统由模糊控制来完成参数在线修正,以此实现对船舶模型的自适应控制。其控制原理如图l所示。
在模糊控制器的作用下,每个模糊控制器在模糊化环节之前具有量化因子,最后经过解模糊并乘以比例因子以得到最终输出。因为偏差航向作为模糊控制输入的物理论域是在不断变化的,而量化因子和比例因子又是由物理论域和模糊论域共同决定的,所以固化的量化因子和比例因子设置不当过程过于粗糙会导致控制器震荡甚至失去平衡,影响系统精度和稳态性能,产生超调和震荡,因此并不能良好地满足控制精度的要求,需要根据环境情况对量化因子和比例因子进行在线调整。
三、基于BP神经网络的自适应自动舵
这里,添加BP神经网络以调整量化因子和比例因子。期望的方向是BP神经网络的输入,输出是模糊控制器的量化因子和比例因子,以实现对船模型的进一步自适应控制。其控制原理图如图2所示。量化因子和比例因子的变化总趋势不会有太大的改变,将大量人工整定好的量化因子和比例因子作为训练数据,训练所设计的BP神经网络如图2所示。
利用Simulink模型窗口进行了控制模型的搭建,利用nomoto模型进行舵角控制仿真。为在一定程度上模拟风浪流带来的影响,使得仿真过程的更加真实有效符合实际需求,设仿真中所加的干扰为y=2+sin(0.1×t)+randn(-0.5,0.5),包括一个定常干扰、一个正弦波和一个高斯随机信号,干扰信号如图3所示。
对第二章所述船舶模型,以常规PID控制器、模糊PID控制器和基于神经网络的模糊PID控制器分别进行仿真。设船舶的初始航向为000。,期望航向010。,仿真时间为400s。量化因子设为Ke=0.01,Kec=0.1,比例因子Kul=4,Ku2=0.003,Ku3=80,PID控制的初始值为Kp=15,Ki=0.001,Kd=120。
常规PID控制、基于模糊自适应整定的PID控制和基于神经网络的模糊PID控制单独进行过程仿真,其航向和舵角的变化图分别如图5和图6所示。
根据图5和图6及实验情况,我们得到了以下数据如表l所示。对比表中的数据可以看出,本文所设计的模糊神经网络PID自动舵的航向超调量更小达到稳定的时间相对更短相对更有利于船舶操作,也能够减小舵机因转舵产生的磨损,仿真过程中,仿真耗时有所增加。具体可参见表1中的数据。
五、结论与展望
本文基于上述模糊控制理论和神经网络算法设计了船模控制方法。首先,为了调整传统PID自动驾驶仪的比例积分微分环节参数,采用模糊控制理论,使自动舵具有适应环境变化的能力。模糊控制器的模糊化环节的量化因子和比例因子是BP神经网络来调整的,使量化因子和比例因子可变可以提高整个船舶自动舵的环境适应能力,能增强自适应控制的鲁棒性。最后通过仿真,将仿真结果进行对比,观察船舶舵角和航向的变化,可发现本文所设计的基于神经网络的模糊PID自动舵相比常规的PID自动舵和本文所述的模糊PID自动舵进行控制时的超调量和稳定时间方面都具有一定的进步,在时效性还有所欠缺需要进一步研究来获取性能更优的控制策略。
参考文献:
[1]严张凌,代茂.船舶自动舵自适应神经网络控制算法研究,舰船科学技术,2017(12):55-57
[2]智能优化算法及其应用[M].清华大学出版社,王凌著,2001
[3]肖成,谭立新,神经网络在智能控制领域中的应用研究.江苏科技信息,2017(20):57-59
[4]杜加宝,李敬东,王仁强,基于遗传优化径向基神经网络的船舶航向控制.广州航海学院学报,2017,25(4):20-23.
猜你喜欢
商情(2016年43期)2016-12-23
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
考试周刊(2016年21期)2016-12-16
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
