一种针对路面损坏识别的点云特征图像生成方法
2019-09-09 08:37:54刘如飞1朱健1杨正清2马新江
遥感信息 2019年4期
刘如飞1,朱健1,杨正清2,马新江
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590;2.天津水运工程勘察设计院,天津 300456;3.青岛秀山移动测量有限公司,山东 青岛 266590)
0 引言
随着公路交通运输的快速发展,加上雨雪、高温、超载等极端条件影响,导致大多数路面出现裂缝、松散、拥包、坑槽、沉陷等多种不同程度的损坏,影响了路面使用性能,带来很大的交通安全隐患。车载移动测量技术是一种先进的三维空间数据测量技术,该系统集成了惯性组合导航和激光扫描技术,能够在不与被测物体接触情况下连续获取空间基准统一的路面及两侧三维激光点云数据。与传统的道路检测技术相比,该技术不受自然光照等干扰因素的影响,获取的点云包含空间几何特征,相对测距精度达到1 mm,为高精度的路面损坏检测提供了基础[1]。因此,面向点云中路面损坏目标的快速识别是该技术的关键所在。
由于人工智能的迅速崛起,图像处理算子基本成熟,基于图像处理是点云识别分类的重要研究方向。在利用点云特征图像进行目标检测方面,许多学者做了大量的工作。SHI 等[2]利用投影点密度对建筑物进行距离图像分割,通过分析不同地物的投影点密度(DOPP)差异进行点云分类。YU等[3]基于三维模型表面重建的思想,将车载激光获取的路面点云通过Delaunay三角剖分、插值,并利用正则平滑算子去噪,生成路面表面模型,通过模型中路面损坏的几何细节和深度等信息来评价路面损坏情况。杨必胜等[4]提出一种面向车载激光扫描数据快速分类的点云特征图像生成方法,将扫描区域进行平面规则格网投影,通过分析格网内部点云的空间分布特征(平面距离、高程差异、点密集程度等)生成扫描区域的点云特征图像,进而结合图像处理的方法对点云特征图像进行分割和特征提取,从而实现点云数据的快速分类。LI[5]采用改进的增量式Delaunay三角剖分算法构建不规则三角网,根据三角形包含格网原则,对格网点高程进行距离倒数加权插值计算,从而快速生成规则格网DEM。谭凯等[6]首先利用激光点云反射强度信息,生成强度图像,然后对强度图像进行中值滤波,最后利用Canny算子进行建筑物边缘提取。彭晨等[7]通过选取点云的6种特征(法向量与水平面夹角θ、全方差v、维数特征α1、α2、α3 和特征根熵Ef)生成点云特征图像,再利用支持向量机实现对建筑物立面的提取。LEHTOMAKI[8]基于三维机器视觉的思想,通过局部描述直方图和自旋二维图像进行点云特征匹配和分类。
上述利用点云生成特征图像的方法大体可以分为四类:一是利用点云投影后的密度信息,生成密度图像,该方法可以较好识别房屋、树木、路面等密度差异较大的地物,而对路面与损坏目标等密度差异较小的地物识别度不高,无法进一步提取;二是利用单站激光扫描仪所获得的离散矢量点,以扫描仪为球心,生成球面距离图像,该方法可以准确识别有明显差异的房屋、道路等地物,而无法精细识别路面上的损坏目标等细节要素;三是利用激光扫描采集的回波强度信息,生成强度图像,该方法能够识别目标边缘特征,但是容易受噪声的干扰;四是利用点云的高程或坡度等空间信息,加以插值、平滑等方法生成点云特征图像,该方法充分利用了点云的空间特征,稳健性相对较好,噪声相对较少,但利用传统计算方法进行路面损坏识别的针对性不强,容易损失路面损坏细节,如何针对性的利用点云空间信息准确识别目标特征是该方法需要改进的地方。本文充分分析路面损坏的空间分布特征[9],在第四类方法研究的基础上,设计一种基于损坏特征参考的插值算子,构建圆形结构高程梯度差分窗口进行路面梯度分析,生成能够反映路面损坏细节的点云特征图像。
1 路面损坏特征图像生成方法
本文提出一种针对路面损坏识别的点云特征图像生成方法。该方法首先统计路面点高程,过滤异常噪声;然后分析路面损坏点云的空间分布特征,综合路面损坏点云高程信息,设计基于损坏特征参考的插值算子,插值缺失点;再进一步分析不同路面损坏的空间几何分布特点,构建圆形结构的路面损坏高程梯度差分窗口,进行路面梯度分析;最后结合极值约束下的中值滤波滤除椒盐噪声,进一步增强路面损坏特征,生成路面损坏特征图像。主要流程如图1所示。
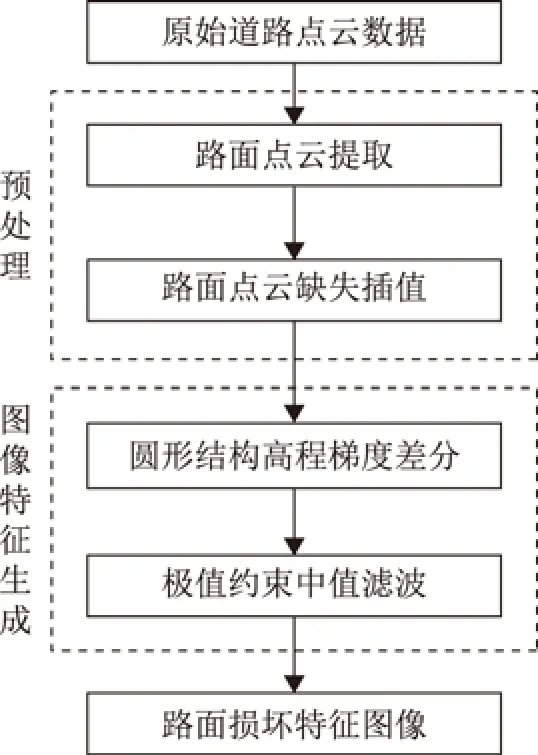
图1 路面损坏特征图像生成算法流程图
1.1 预处理
车载移动测量系统采集的点云数据不仅包括道路,还有路面上的行驶车辆、道路两侧的建筑物和树木等噪点。算法首先对原始路面点云进行预处理,剔除车辆、建筑物、树木等明显的非路面点云,获取路面点云数据,再进一步过滤由路面杂物引起的少量异常噪声,并对路面点云遮挡区域进行插值,最终得到完整的路面点云数据,为路面损坏识别提供基础数据源。
1)路面点云提取。原始点云中含有大量的非路面点,为了减小数据量,提高数据处理效率,同时削弱非路面点对路面损坏特征图像生成的影响,首先要对原始点云进行路面滤波,得到路面点云。结合本文的数据索引方法,采用文献[10]的算法进行路面滤波。
滤波后的路面点云通常含有少量的噪点,主要是由路面杂物等引起的。本文对路面点和噪点进行高程统计分析,发现如下规律:路面点高程起伏较小,路面损坏处的高程起伏始终较大,点云分布连续,而噪点均高于路面,且高程值起伏较大,分布突兀,数量稀少,如图2所示。
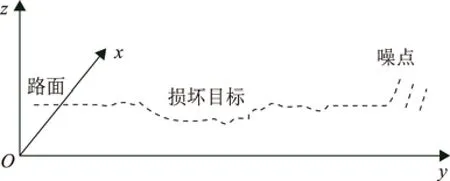
图2 路面点云纵剖面示意图
基于上述分析,设定统计窗口边长Dside,利用直方图统计每个窗口内的路面点云高程值,以5 mm为高程间隔(根据公路技术状况评定标准,路面损坏最低检测深度为5 mm[11])划分高程值,根据以上统计规律,去除直方图中路面点右侧少于阈值N0的间隔内所有点。图3为4种点云分布直方图统计示意图。
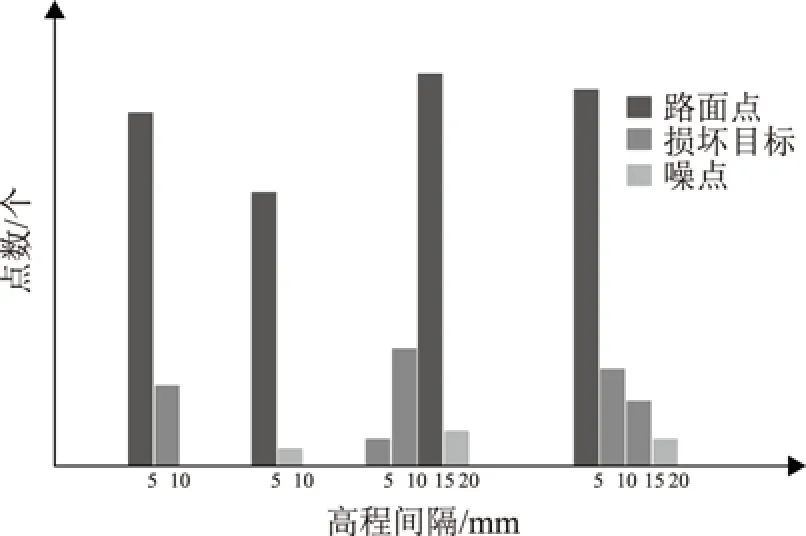
图3 4种点云分布直方图统计示意图
2)路面点云缺失插值。为了保留路面损坏细节,建立二维虚拟格网后,取每个格网内高程最小的点为格网点。针对缺失的点,通过分析路面损坏的空间分布特征可知,损坏处点云的分布具有紧密性,损坏点之间的距离与路面点相比更加邻近,并且,损坏处的高程分布具有渐变性,即高程值逐级由两侧向内部降低,而局部路面点的高程分布具有随机性,即高程值在一定范围内无序分布。如图4为路面损坏特征示意图,图4(a)、图4(c)红色虚线为变形类损坏形状示意线,图4(b)、图4(d)红色虚线为裂缝类损坏形状示意线。
基于上述路面损坏分布特点,构建以下插值原则:
①统计待插点8邻域内含有格网点的高程值,取总数前1/2的较低高程格网点,作为疑似损坏点;
②根据损坏处点云的分布紧密性特点,随机选取三个疑似损坏点组成三角形,若有三角形任意边长经过中心格网,则认为缺失点邻近疑似损坏点,将所有疑似损坏点作为参考点,取参考点的高程中值插值缺失点高程,如图4(a)、图4(b)所示;
③若没有三角形经过中心格网,则认为缺失点邻近路面点,取总数后1/2的较大高程格网点作为参考点进行高程中值插值,如图4(c)、图4(d)所示。
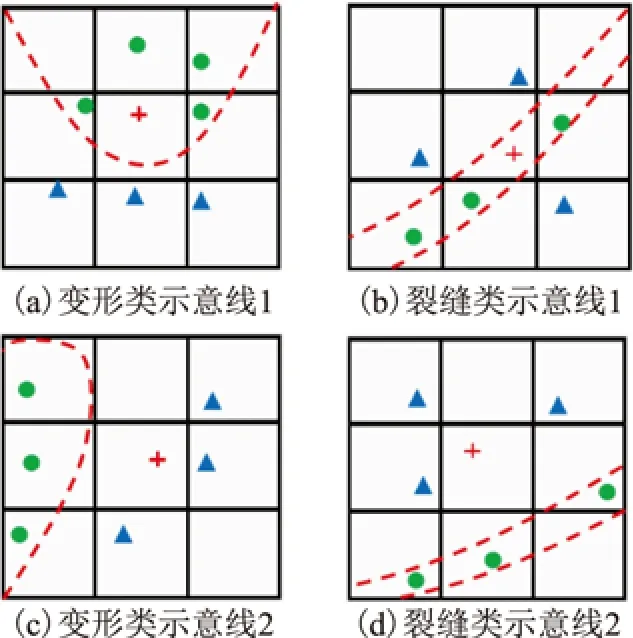
注:▲路面点 ●路面损坏点 +待插缺失点
1.2 路面损坏特征图像生成
预处理完成后,需要进一步分析不同路面损坏的空间几何分布特点,构建分析窗口,精细识别路面损坏目标,最后滤除椒盐噪声,进一步增强损坏特征,生成路面损坏特征图像。
路面损坏主要包含变形类和裂缝类两种[12],在空间分布上,变形类损坏具有一定的面积和深度,边缘具有明显的弧线特征;裂缝类损坏具有一定的宽度和深度,边缘表现出一定的线性特征,且线性特征方向具有不确定性。总地来说,路面损坏的边缘特征各异,在方向上具有各向异性。因此,本文利用具有多尺度圆形结构特征的分析窗口,进行高程梯度差分,精细识别路面损坏目标,具体过程如下:
①寻找第一层邻域格网。以一个格网中心点为圆心,2.5倍的格网边长为半径作圆,在圆形结构内找到完整的格网,分别计算x、y、45°和135°方向上的高程梯度增量,分析窗口如图5所示。
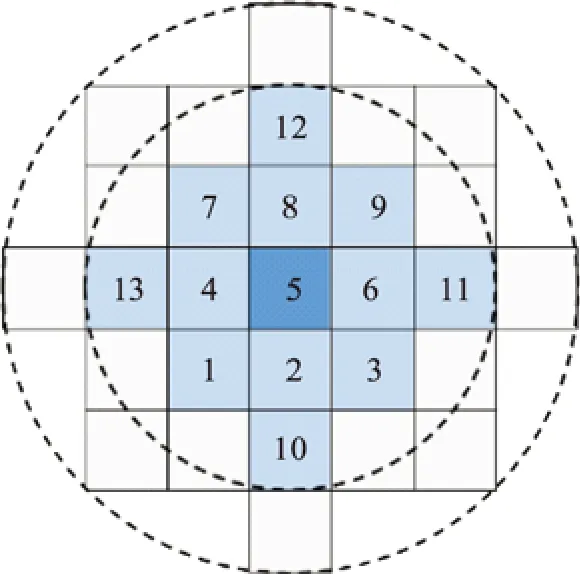
注:1~13表示第一层邻域格网,其中5为中心格网,内圆为第一层圆形结构,外圆为第二层圆形结构。
中心格网5在x、y、45°和135°方向上的高程梯度变化分别通过式(1)~式(4)计算:
Sx=z9+2z6+z3-z7+2z4+z1/(8×dstep)
(1)
Sy=z1+2z2+z3-z7+2z8+z9/(8×dstep)
(2)
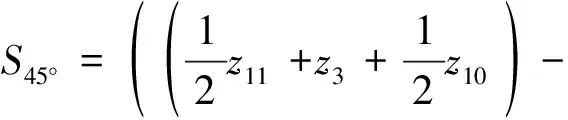
(3)
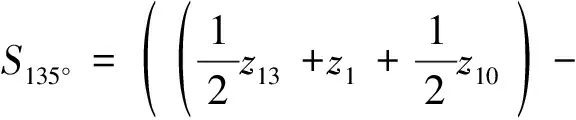
(4)
式中:Si为某一方向的高程梯度变化值;zi为某一邻域格网点的高程值;dstep为格网边长。
②寻找第二层邻域格网。以3.5倍的格网边长为半径作圆,在圆形结构内找到完整的格网,分别计算出第二层4个方向上的增量,方法同①。圆形结构的权重配比规则是根据邻域与中心格网的距离关系进行分配,距离越近权重越大[12]:与中心格网相邻的4邻域,最能体现中心格网的高程梯度变化情况,故权重配比为2;次之为8邻域斜方向的4个格网,权重配比为1;16邻域权重配比为1/2,以此类推。
③通过步骤①和步骤②得到第一层和第二层邻域格网4个方向上总共8个高程梯度变化值,从8个高程梯度变化的绝对值中找出最大值,即为中心格网的最终值,以此输出路面损坏的初始特征图像。中心格网值的计算公式为:
(5)
式中:slope为中心格网值;S1i表示第一层邻域4个方向的高程梯度变化值;S2i表示第二层邻域4个方向的高程梯度变化值。
④将格网值slope直接做为点云特征图像的像素值,生成初始损坏特征图像。
高程梯度差分后得到的初始损坏特征图中,含有椒盐噪声[13],对生成精细的路面损坏特征图像造成了干扰,统计噪声的分布规律,发现主要包含两类:一类是分布在路面损坏中的,如图6(a-Ⅰ),该类噪声被路面损坏点包围,与邻近格网值相比,属于极小值;另一类是分布在正常路面中的,如图6(a-Ⅱ),该类噪声被正常路面点包围,与邻近格网值相比,属于极大值。
基于以上规律,本文利用一种中心格网极值约束的中值滤波方法滤除椒盐噪声:将中心格网值与8邻域格网值比较,判断中心格网值是否为极值。如果是,则找出8邻域格网值的中值,作为该中心格网值。噪声滤波后的图像如图6(b)所示。
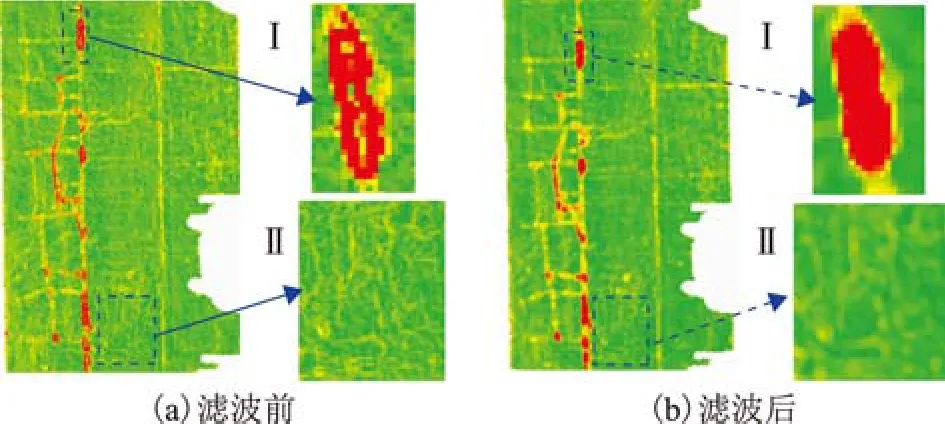
图6 噪声滤波前后对比
2 实验分析
本文采用青岛秀山移动测量公司研发的VSurs-E型移动测量系统,该系统空间定位精度达到3 cm,相对测距精度达到1 mm,采集青岛市黄岛区渭河路和元宝山路实验数据。如图7所示,实验路段总长度约1.8 km,移动测量系统沿双向车道行驶采集数据,包含沥青和水泥两类路面,路面点云平均间距3 cm左右,路面坡度小于12.6%。实验路段多为重型车辆行驶,路面损坏较多,路面石块等杂物穿插其中。
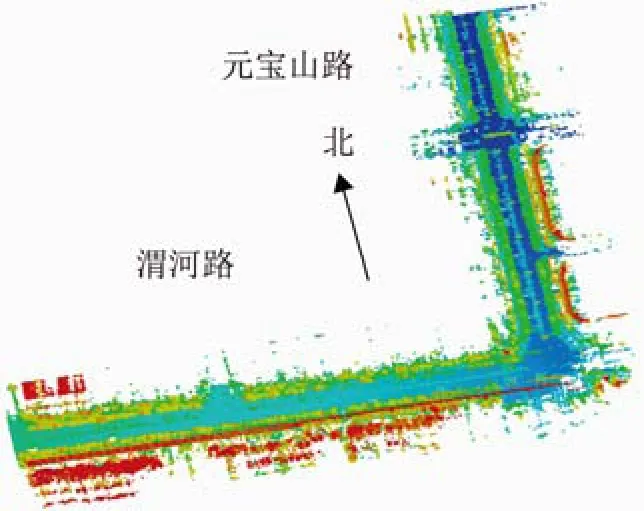
图7 车载激光点云数据
本文算法需要设置的参数为:统计窗口边长Dside、统计去噪阈值N0、二维虚拟格网边长dstep。统计窗口边长设置原则为窗口内点云厚度不超过1 cm,去噪阈值则根据局部路面点数量设置百分比,为了不损失路面损坏细节,二维虚拟格网边长根据点云最大间距设置。针对本文实验数据,设置统计窗口边长Dside=0.5 m,统计去噪阈值N0=统计窗口内路面点的1/10,格网边长dstep=0.01 m。图8为生成的路面损坏特征图像,全部38幅特征图像中,存在路面损坏的图像有25幅,包含的损坏类型主要有坑槽、沉陷、波浪拥包、横纵向裂缝和破碎板等。其中最小损坏目标长为0.025 m,宽为0.009 m,最大的路面损坏面积达4.663 m2,最深的路面损坏为沥青路面坑槽,坡度达12.6%。

图8 路面损坏特征图像
为验证本文算法的可靠性,选取图9中的4处位置,利用ArcGIS中传统的三阶反距离平方权坡度差分方法[14],插值算子选择反距离权重线性插值,格网边长为0.01 m,输出特征图像,与本文算法进行比较,图9(a)为传统方法提取结果,图9(b)为本文算法提取结果。
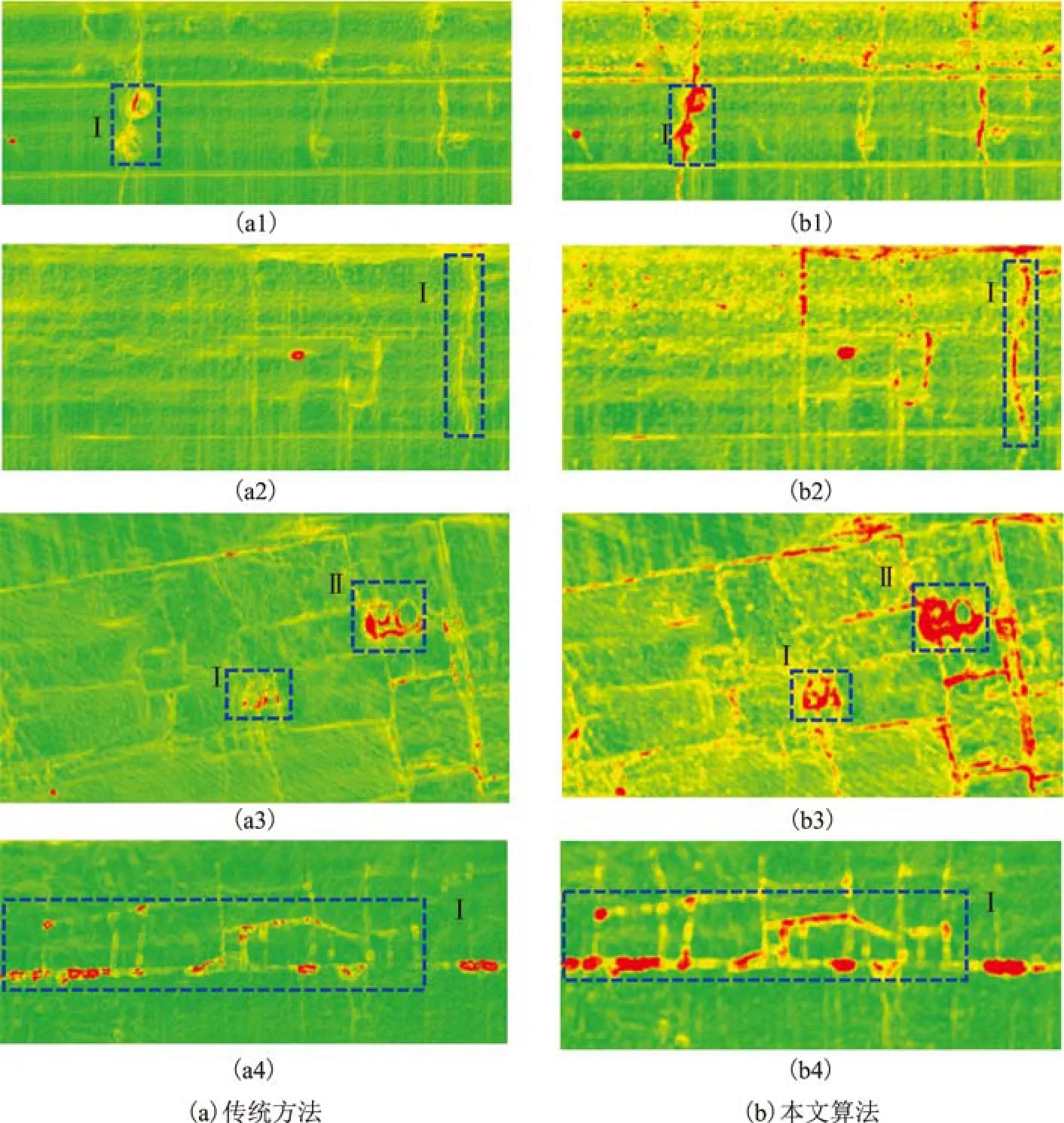
图9 2种方法对比
截取特征图像部分区域,进行精细对比,由图9可见,沥青路面中,a1-Ⅰ、b1-Ⅰ为坑槽,a2-Ⅰ、b2-Ⅰ为裂缝,a3-Ⅰ、b3-Ⅰ为块裂,a3-Ⅱ、b3-Ⅱ为波浪拥包;水泥路面中,a4-Ⅰ、b4-Ⅰ为破碎板。对比发现,传统方法只能识别坑槽、波浪拥包部分损坏严重的区域,微弱识别块裂和破碎板的内部边缘,无法识别出特征微弱的外部边缘,完全损失裂缝类损坏边缘特征,由于传统算法利用反距离权重插值,没有实现面向路面损坏特征的针对性插值,造成了损坏边缘的过度平滑,加上传统坡度差分方法的局限性,从而导致其边缘特征不明显;而本文算法用一种基于损坏特征参考的插值算子,不会造成坑槽、波浪拥包处缺失点的过度平滑及内部损坏细节的损失,从而可以完整识别整块损坏区域,再加上圆形结构下的高程梯度差分窗口,适应路面损坏特征分布的各向异性,精细识别出块裂和破碎板的外部和内部边缘特征,特别针对裂缝,算子以路面损坏的实际特征为基础,突显出了裂缝的损坏细节及连续性,精细识别其实际的边缘特征,不会造成边缘的过度识别。
最终,统计上述所有实验路段实际路面损坏类型及数量,通过人工判读,根据式(6)和式(7)计算出各个方法的准确率(precision)和召回率(recall)[15],与传统方法进行比较,如表1所示。
(6)
(7)
式中:TP为正确识别出来的损坏目标数量;FP为错误识别的数量;FN为未识别的数量。
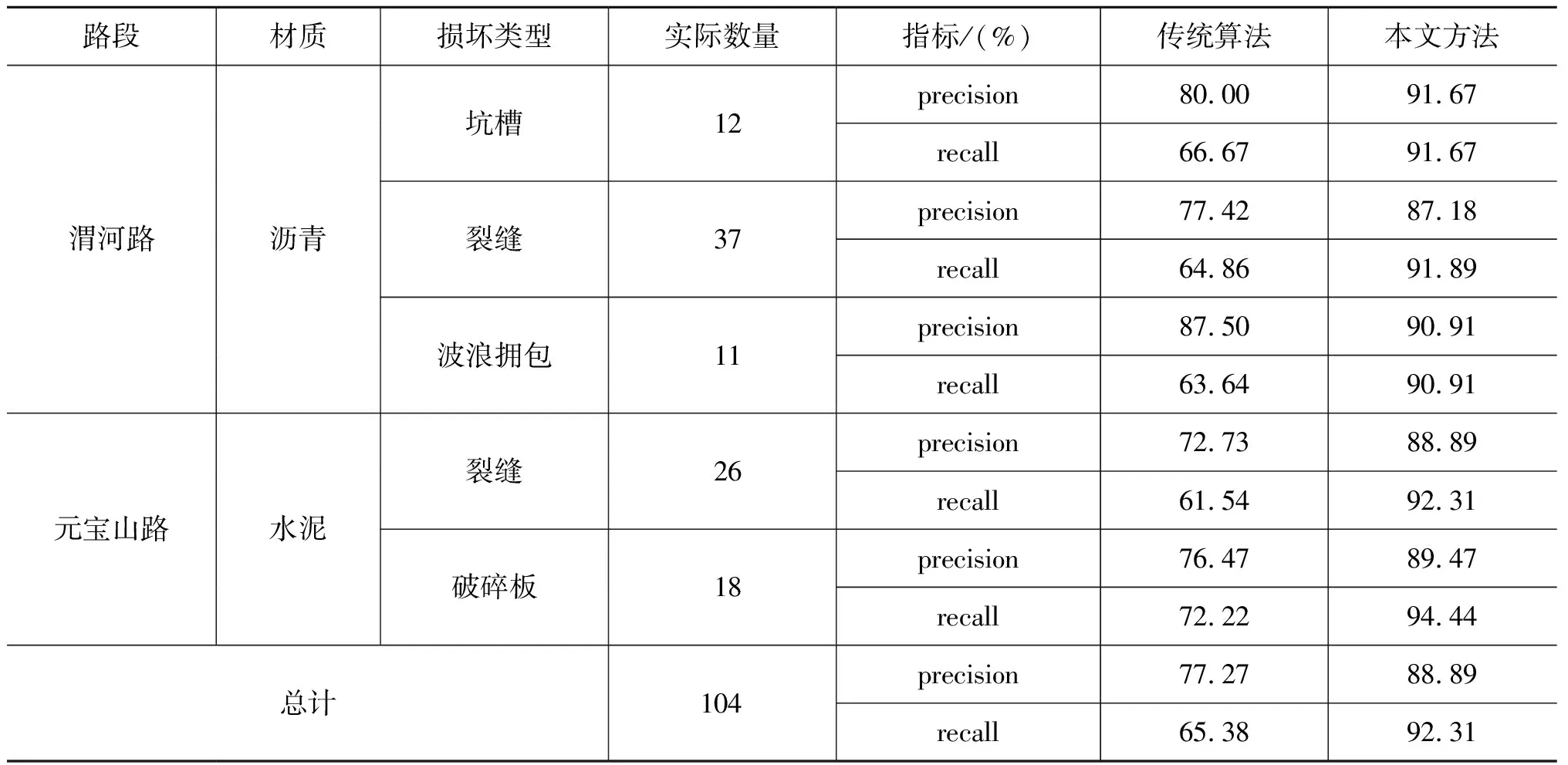
表1 提取结果定量分析统计
综合表1可得,对于不同类型的路面,本文算法对路面损坏的准确率和召回率为88.89%和92.31%,远远高于传统方法,说明本文算法对不同类型路面损坏的识别度高,具有较强的适用性。其中,针对裂缝类损坏,本文算法的召回率高达91.89%和92.31%,说明本文算法针对特征不明显的裂缝类损坏具有较好的识别作用。但是,由于裂缝类损坏往往与其他类别损坏相互穿插,人工识别容易受到干扰,所以准确率相对较低。综合来看,本文算法生成的路面损坏特征图像可以明显提高路面损坏检测的准确度,具有较强的可靠性,同时能降低误检和漏检,是一种实用的路面损坏特征图像生成方法。
3 结束语
针对车载激光点云中路面损坏目标的特征图像生成,本文充分挖掘了路面损坏点云中的空间几何特征,通过结合路面点云高程差异,先过滤异常噪声,设计基于损坏特征参考的插值算子,插值缺失点;然后进一步分析不同路面损坏的空间几何分布特点,利用多尺度圆形结构下的路面损坏高程梯度差分窗口进行路面梯度分析;最后结合中心格网极值约束下的中值滤波滤除椒盐噪声,进一步增强路面损坏特征,生成路面损坏特征图像。与传统方法相比,本文算法生成的路面损坏特征图像整体提取准确率和召回率分别为88.89%和92.31%,提高了路面损坏检测的可靠性和准确性,解决了在不同环境条件下损坏目标图像生成算法的一致性问题,进一步为高精度路面损害自动化检测提供可靠的数据源。本文所做研究为路面损坏高精度检测和损坏目标矢量化等打下了重要基础,后续工作将重点研究路面损坏目标的高精度自动提取。
猜你喜欢
空间科学学报(2020年6期)2020-07-21 05:36:46
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
江西理工大学学报(2015年3期)2015-12-22 05:26:18
电测与仪表(2014年11期)2014-04-04 09:21:30
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48