滑模控制在BUCK变换器中的应用
2019-09-05 23:06范昭君
科技风 2019年22期
范昭君

摘 要:本文设计双积分滑模控制器是基于CCM模式下Buck变换器,首先计算出该方法的滑模可达性条件及其控制器方程,并论述了该种方法的稳定性,最后采用SIMULINK对该控制器在Buck电路中的应用进行了仿真,证明该方法具有良好的动态性能、鲁棒性。
关键词:双积分滑模控制;Buck变换器;CCM;SIMULINK
目前,PID控制技术是电力电子变换器的主要控制方法,但该方法有以下几点不足:1)对系统参数的变化比较敏感,2)当负载大范围变化时,开关变换器动态响应速度慢、输出波形有畸变等缺点[1]。最近几年,为了提高变换器的各项性能,在电力电子变换器领域掀起了研究各种先进控制策略的风潮。电力电子开关变换器是非线性的,滑模控制是非线性控制器,他们具有天然的适用性,采用滑模控制的变换器具有鲁棒性强、动态响应速度快、控制实现简单等一系列优点,因此成为研究的热点。
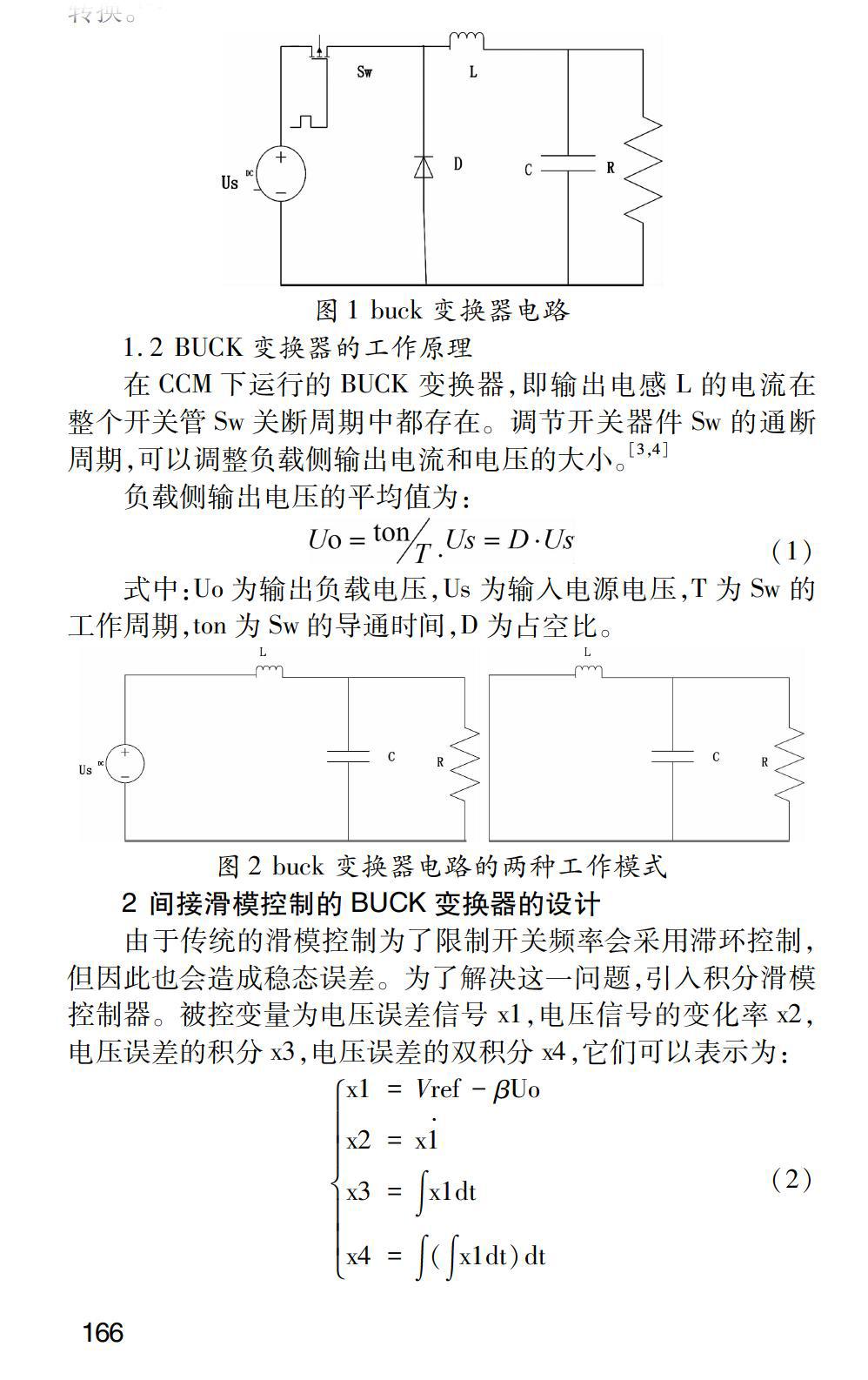
1 BUCK 变换器的组成及基本原理
1.1 BUCK 变换器组成
BUCK 变换器是由MOSFET,二极管D,电感L,电容C等元件组成,该电路主要实现直流电压Us 到直流电压Uo的转换[2]。
1.2 BUCK變换器的工作原理
在CCM下运行的BUCK变换器,即输出电感L的电流在整个开关管Sw关断周期中都存在。调节开关器件Sw的通断周期,可以调整负载侧输出电流和电压的大小[3,4]。
负载侧输出电压的平均值为:
2 间接滑模控制的BUCK变换器的设计
由于传统的滑模控制为了限制开关频率会采用滞环控制,但因此也会造成稳态误差。为了解决这一问题,引入积分滑模控制器。被控变量为电压误差信号x1,电压信号的变化率x2,电压误差的积分x3,电压误差的双积分x4,它们可以表示为:
3 仿真结果
为验证控制系统的可靠性,对于BUCK变换器的参数为下,输入电压值为24V,输出电压值为12V,MOSET的开关频率为20KHZ,电阻阻值为3欧姆,取L为50e-06H,C为4.36e-02F。
取参考电压Vref为2.5V, =0.208,滑模系数 , 所以,K1=0.327,K2=53.78,根据系统的抗干扰能力的强弱,经过仿真对比可得出:K3=2000(此时,系统的抗干扰能力最强)。
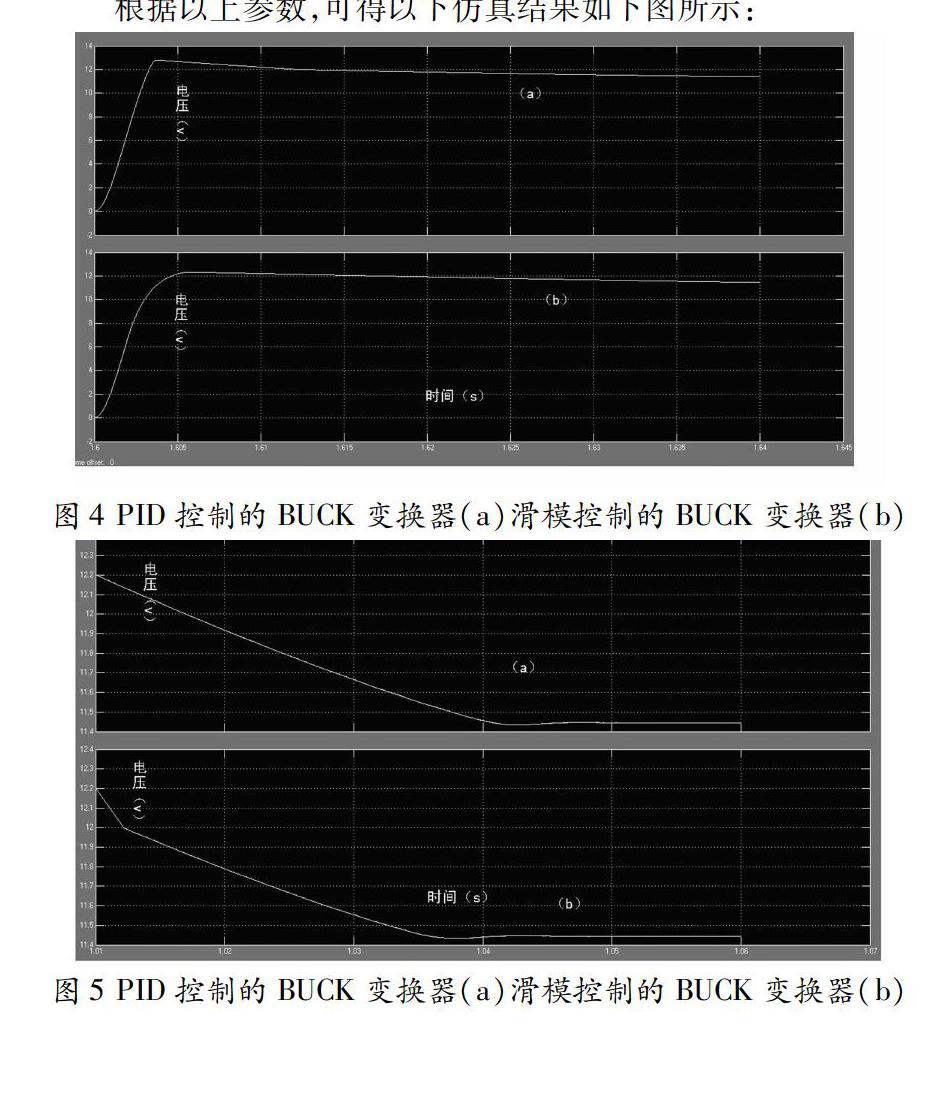
根据以上参数,可得以下仿真结果如下图所示:
图4 PID控制的BUCK变换器(a)
滑模控制的BUCK变换器(b)
图5PID控制的BUCK变换器(a)
滑模控制的BUCK变换器(b)
根据仿真结果可得,滑模控制的BUCK变换器,系统的超调较小,调节时间较快,稳态误差较小,大约稳定在11.5左右,而PID控制的BUCK变换器,系统的超调较大,调节时间较长,稳态误差较大,输出的电压大约稳定在11.4左右。
4 结论
本文研究双积分滑模控制在Buck变换器中的应用,由于传统的滑模控制为了限制开关频率会采用滞环控制,但因此也会造成稳态误差。为了解决这一问题,引入积分滑模控制器,
最后通过SIMULINK对该控制器在Buck电路中的应用进行了仿真,证明该方法具有良好的动态性能、鲁棒性。
参考文献:
[1]刘斌.基于Buck型变换器的滑模变结构控制技术研究[D].浙江大学,2007.
[2]汪垚.一种基于滑模变结构控制的Buck变换器设计[J].农村经济与科技,2018,29(16):297-298+262.
[3]丁昱文,邹海荣,丁家圣,周建达.DC-DC降压变换器的滑模控制研究[J].信息技术,2017(06):137-141.
[4]汪习成.带恒功率负载的数字Buck变换器的研究[D].广西大学,2017.