
基于LabVIEW的数据融合火灾识别模型应用
2019-09-03 11:33张嘉琪王浩杰
实验室研究与探索 2019年8期
王 晨, 张嘉琪, 王 丽, 王浩杰
(天津理工大学 环境科学与安全工程学院,天津 300384)
0 引 言
随着城市化进程的不断加快,各类建筑的数量不断增加,高度和规模不断扩大。火灾发生的频率也逐渐增高,造成的人员伤亡和经济损失十分严重。对火灾进行及时准确的探测和预防至关重要。但现有的火灾预警系统存在诸多问题,火灾探测器的种类单一,仅仅依靠简单的阈值判断对监测信息进行识别,如通过监测环境温度、可燃气体浓度等参数识别火灾[1-3],但是实际火灾预警系统中采用的大都为高灵敏度传感器,若采用单一阈值判断,极易受到周围环境的干扰,导致高虚警率。如果降低传感器的灵敏度或者传感器损坏,在应用时传感器反应迟钝或无反应,则会导致高漏报率[4-6]。
传统火灾预警系统无法满足复杂火灾报警的需要,笔者提出基于多传感器数据融合的火灾识别方法,选取烟雾、温度、CO传感器进行火灾监测,利用神经网络及引入可靠度作为数据权重的证据理论(Dempster-Shafer,D-S)等建立火灾识别模型,分别对各类传感器进行数据融合,具有高灵敏度和抗干扰能力。同时,采用LabVIEW虚拟仪器管理平台开发采集、处理、识别功能,实现对采集多传感器数据统一管理及识别系统的自动化,提高火灾识别的及时性、准确性[7-8]。
1 火灾模型总体设计
火灾识别模型总体流程如图1所示,对各传感器数据进行采集,首先判别是否为同类传感器,若是同类传感器采用BP神经网络先一步进行数据融合,然后将得到的融合结果与其他异类传感器数据用D-S进行融合,由输出结果判定是否发生火灾。

图1 火灾识别模型总体设计
2 数据融合在虚拟仪器中的实现
2.1 LabVIEW虚拟仪器
LabVIEW是一种图形化的编辑程序语言,用程序图或框图取代程序代码,提供实现仪器编程和数据采集系统的便捷途径,能根据用户需要定义具备各种功能的仪器,图片化的界面使整个程序井然有序,生动清晰,使用该技术设计、测试、研究、计算及实现仪器系统功能,可以提高工作效率[9]。
2.2 神经网络在虚拟仪器中的实现
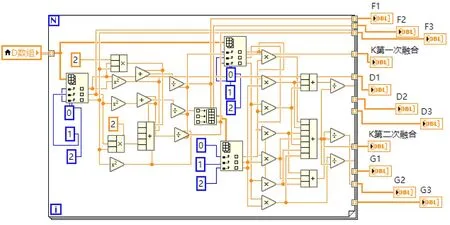
神经网络第1阶段为训练阶段,随机选取大量样本,将其作为神经网络的输入和输出。通过大量样本,首先信号正向传播,每层节点的输出都只影响下层节点的输入,选取Sigmoid型函数[10]作为神经网络内部输入层到隐层和隐层到输出层之间的传递函数:
Ct={exp[-(∑bj·Vjt-γt)·r]+1}-1
(1)
式中:bj为隐层各神经元输入;Vjt为隐层-输出层连接权值;r为Sigmoid型函数的修正系数;γt为输出层的阈值;Ct为输出值。图2为隐层到输出层的Sigmoid型函数在LabVIEW虚拟仪器中的实现。如果输出层得出数据与期望输出值的最大误差大于设定允许误差值则将反向计算,即相对误差值沿原传输路径返回,通过修改各神经元的权值和阈值继续训练,进行输出值与期望值的比较使误差信号最小,最终小于系统设定的相对误差值,或达到训练步数的设定值,则训练结束得到最终权值及阈值[11]。图3为反向计算过程中权值和阈值修正过程在LabVIEW虚拟仪器中的实现。
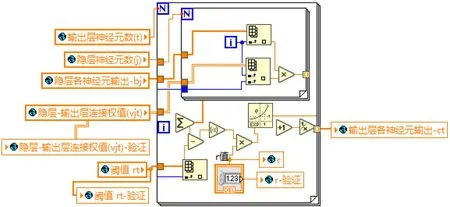
图2 隐层-输出层传递程序图
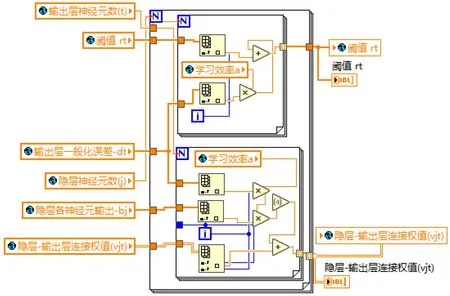
图3 权值及阈值修正程序图
第2阶段为工作阶段,可以设定训练样本、训练次数、最大相对误差等参数,能清楚地观察到训练样本的计算结果,也可根据训练好的结果输入新的值,即可得到相对应的输出量。采用LabVIEW虚拟仪器开发的神经网络控制前面板如图4所示。

图4 神经网络控制前面板图
2.3 基于可靠度的D-S证据在虚拟仪器中的实现
针对传统D-S,若证据完全冲突时无法合成或高度冲突会导致出现与常理相悖结果的特点,引入可靠度的量化值作为权重[12],对各基本概率分配进行加权平均,再使用D-S融合规则进行融合。
首先设定火灾发生所有情况的集合为识别框Ω,Ω={A1,A2,A3},集合内的每个元素代表火灾发生的一种情况,通常为有火灾、无火灾、不确定,集合内的各个元素互斥。其次结合模糊理论,用高斯型隶属度函数表示各个传感器监测值与火灾基本概率分配的信任度函数[13],图5为各传感器信任度函数在LabVIEW虚拟仪器中的实现。
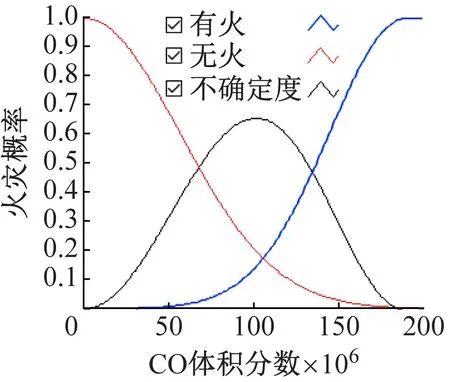


图5 各个传感器输出信任度函数
然后引入可靠度作为权值。传感器的可靠度通过数据监相互支持度进行量化,支持度是相似度的函数,一个传感器基本概率分配与其他传感器的相似度越高,则支持度越高[14]。
相似度可通过相关系数法得到,传感器m1与mj传感器间相似度为:
(2)
式中:Ai为火灾发生的第i种情况;mj(Ai)为第j个传感器对第i种情况的基本概率分配。sim(m1,mi)为m1传感器与mi传感器之间的相似度。相似度的取值范围为[0,1],表示两个传感器基本概率分配完全相同或完全冲突。传感器m1的支持度与可靠度[15]为
(3)

(4)
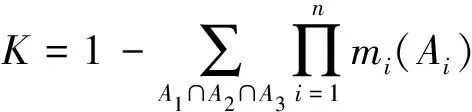
式中:sup(mi)为mi传感器的支持度,Dcrd(mi)为mj传感器的可靠度。最后用D-S进行融合。将可靠度作为传感器的权值,对基本概率分配进行加权平均,得到修正后的不同火灾情况的基本概率分配为{m′(A1),m′(A2),m′(A3)}。对修正后的基本概率分配进行n-1次D-S数据融合,其融合规则如下式所示[16]:
(5)
(6)
最终得出融合结果,并判断火灾是否发生。图6为基本概率分配加权平均及融合过程在LabVIEW虚拟仪器中的实现。
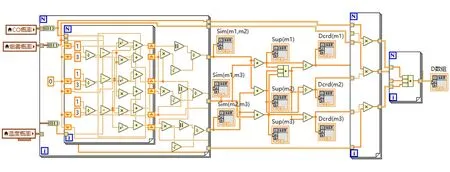
(a) 基本概率分配修正程序图
(b) D-S证据理论融合程序图
3 应用实例及结果分析
将由烟雾、温度、CO等传感器组成的两套监测系统安装于实验室左右屋顶正上方,在实验室一角燃烧材料,主要分为明火燃烧和阴燃。经过多次同等条件下的燃烧实验,得到火灾初期其烟雾、CO、温度等传感器的测试数据,通过修正得到明火与阴燃实验中传感器响应曲线,如图7所示。由响应曲线可以看出,明火情况下,火灾初期燃烧不充分,温度最先开始上升,其次CO气体和烟雾体积分数迅速上升。随着燃烧的继续,CO气体和烟雾体积分数开始降低,而温度持续上升。阴燃情况下,火灾特征不明显,与明火情况相同温度首先开始上升,其次烟雾体积分数迅速上升,CO气体变化不明显。随着燃烧的继续,烟雾体积分数趋于平稳,CO体积分数缓慢上升后下降,温度持续上升。
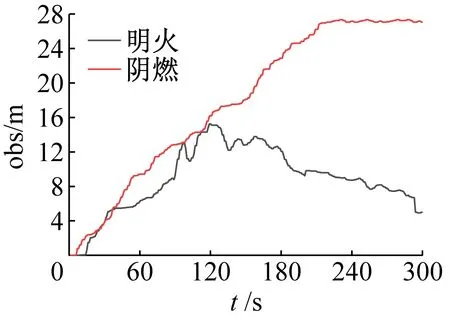
(a) 烟雾传感器响应
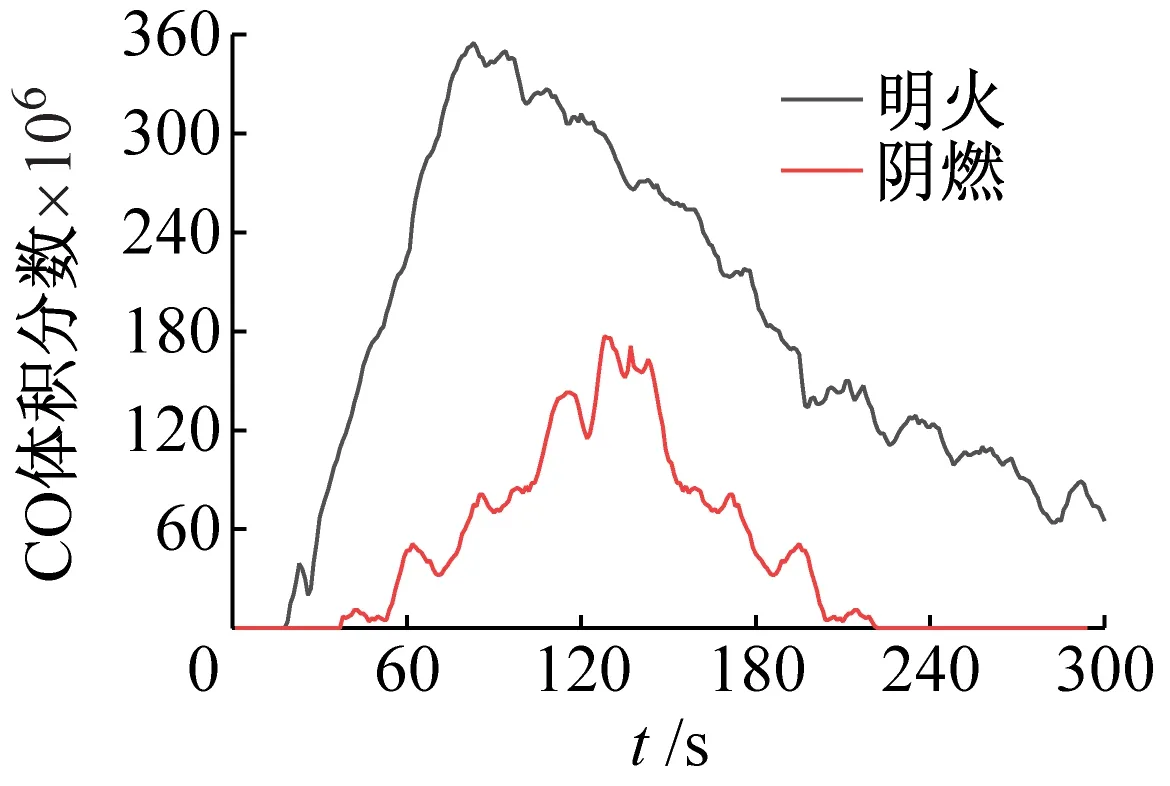
(b) CO传感器响应
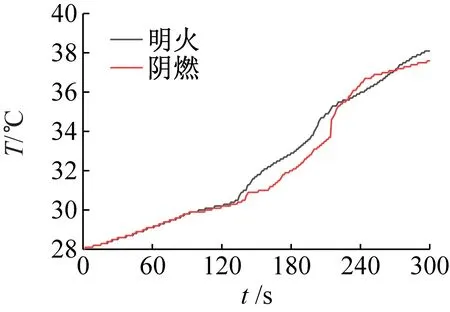
(c) 温度传感器响应
图7 明火及阴燃实验中各传感器响应曲线
采用虚拟仪器根据信任度曲线得到明火和阴燃两种情况下单一传感器的火灾概率和使用多传感器数据融合得出的火灾概率结果如图8所示。从图中可以看出,在阈值为0.5时,明火情况下烟雾传感器、温度传感器、CO传感器这3种单一传感器最早能在40S识别火灾,融合后能在33S识别火灾;阴燃情况下,单一传感器最早在143S识别火灾,融合后能在131S识别火灾,两种火灾情况下,融合后的火灾识别都比单一传感器火灾识别更灵敏;并且单一传感器的变化对融合后的火灾识别有影响,但影响波动较小,若某一传感器出现故障,仍能准确识别火灾,抗干扰能力强。
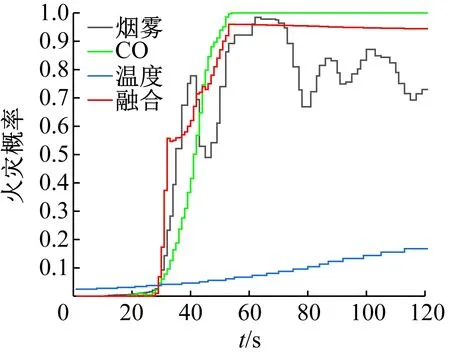
(a) 明火情况下单一传感器及融合火灾概率
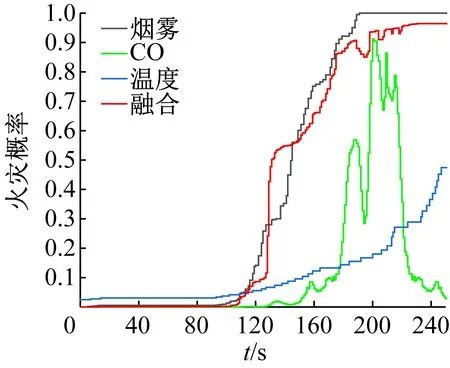
(b) 阴燃情况下单一传感器及融合火灾概率
4 结 语
本文采用神经网络和以可靠度为权值的D-S构建的火灾识别模型解决了单一传感器虚报率和漏报率高的问题,融合后的火灾识别模型更灵敏,能减少人为干扰造成的影响,采用虚拟仪器技术开发识别系统,实现了自主监测、自主融合、自主预警的目标,计算效率高、准确率高、操作简单,能满足市场开发及使用的需求。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
小学阅读指南·低年级版(2021年3期)2021-03-19
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
华人时刊(2019年13期)2019-11-26
江苏通信(2018年4期)2018-12-04
当代陕西(2017年12期)2018-01-19
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
自动化学报(2017年7期)2017-04-18
电子制作(2017年9期)2017-04-17
