
一种基于神经网络的仿生无人机系统设计
2019-09-03 11:33宋建港刘永红
实验室研究与探索 2019年8期
罗 偲, 王 可, 宋建港, 刘永红
(中国石油大学(华东) 机电工程学院, 山东 青岛 266580)
0 引 言
近年来,随着海上运输业和石油钻采业的不断发展,如何在后勤保障不充分的条件下,实现远海钻井平台周边区域监控成为研究领域的热点问题[1-2]。旋翼无人机由于具有体积小、机动性高和容易维修等特点,特别适用于危险环境抵近观测、远海采油作业平台检测和海洋溢油低空监测。如何利用无人机监控输油管溢油、预防原油污染、维护用油安全具有重要的经济和战略意义。而现有无人机着陆系统不适用于在地质灾害发生后地表形态发生变化、未知或特殊环境缺少前期着陆准备以及突发事件无法及时提供任务区域环境信息等情况下执行任务[3]。
飞鸟、昆虫以及蝙蝠等在上亿年进化历史中,经过不断自然选择和进化,其在形态、运动方式、环境适应等方面,达到了几乎完美的程度,这为无人机的设计提供了灵感和参照[1,4]。
本文根据旋翼无人机在非结构化地形下定点降落的需求,通过借鉴自然界生物的着陆能力,在一般旋翼无人机系统的基础上,通过增加柔性夹持机构,运用改进的卷积神经网络(Convolutional Neural Network,CNN)算法,实现了旋翼无人机在复杂地面环境下着陆的任务需求。
1 总体架构
根据仿生旋翼无人机的主要功能需求,设计了如图1所示的硬件总体架构。其中,旋翼无人机的飞行模块由飞行控制单元、人工智能单元、着陆单元以及动力系统,地面模块由远程控制台和手动遥控器组成。
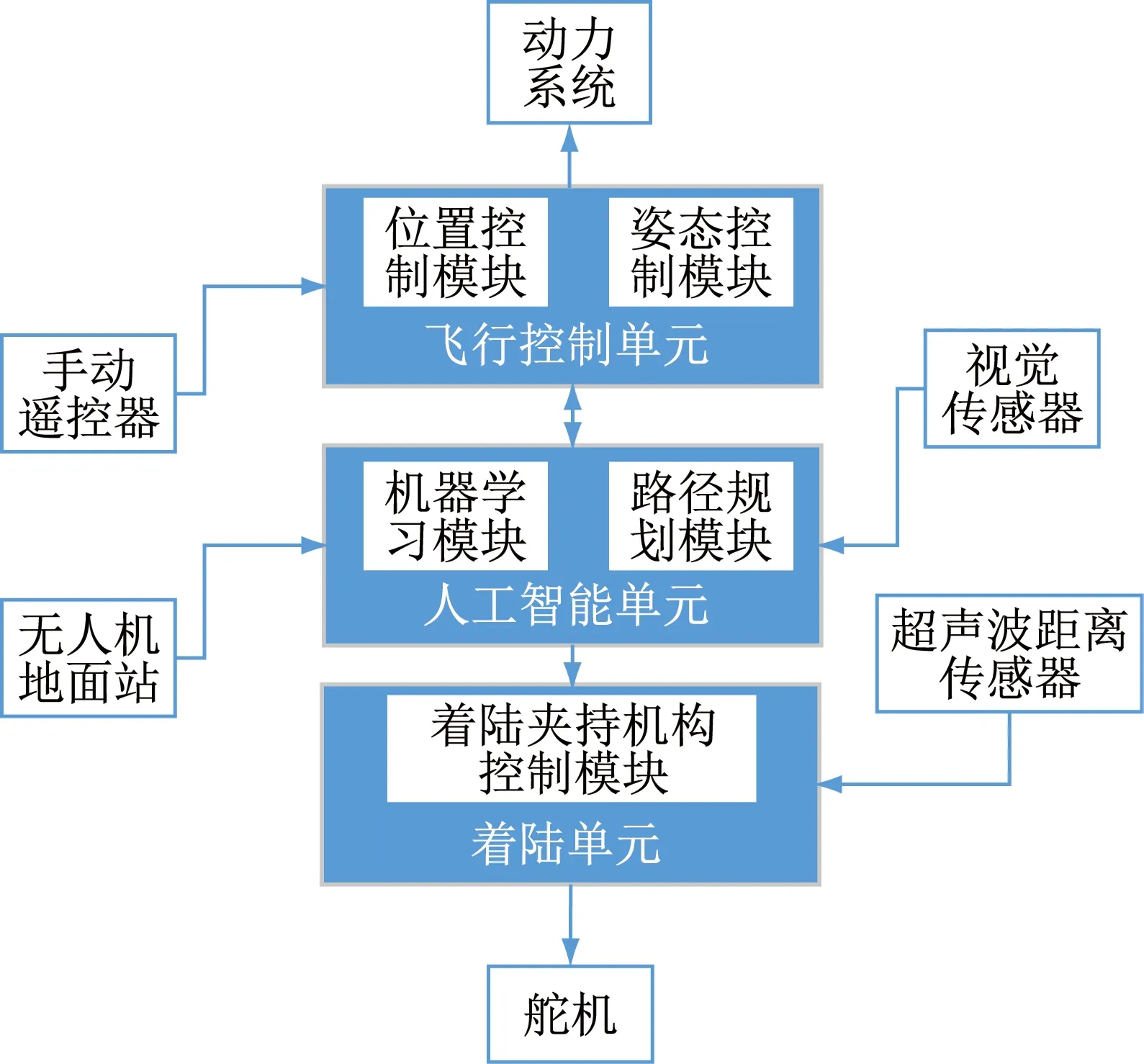
图1 硬件总体架构
2 硬件设计
本硬件架构设计的特点是扩展性好、通用性强、易于后期维护,同时可用于教学与科研[5]。
(1) 飞行控制单元。飞行控制单元使用的是由瑞士苏黎世联邦理工学院开发的Pixhawk 4(见图2)。
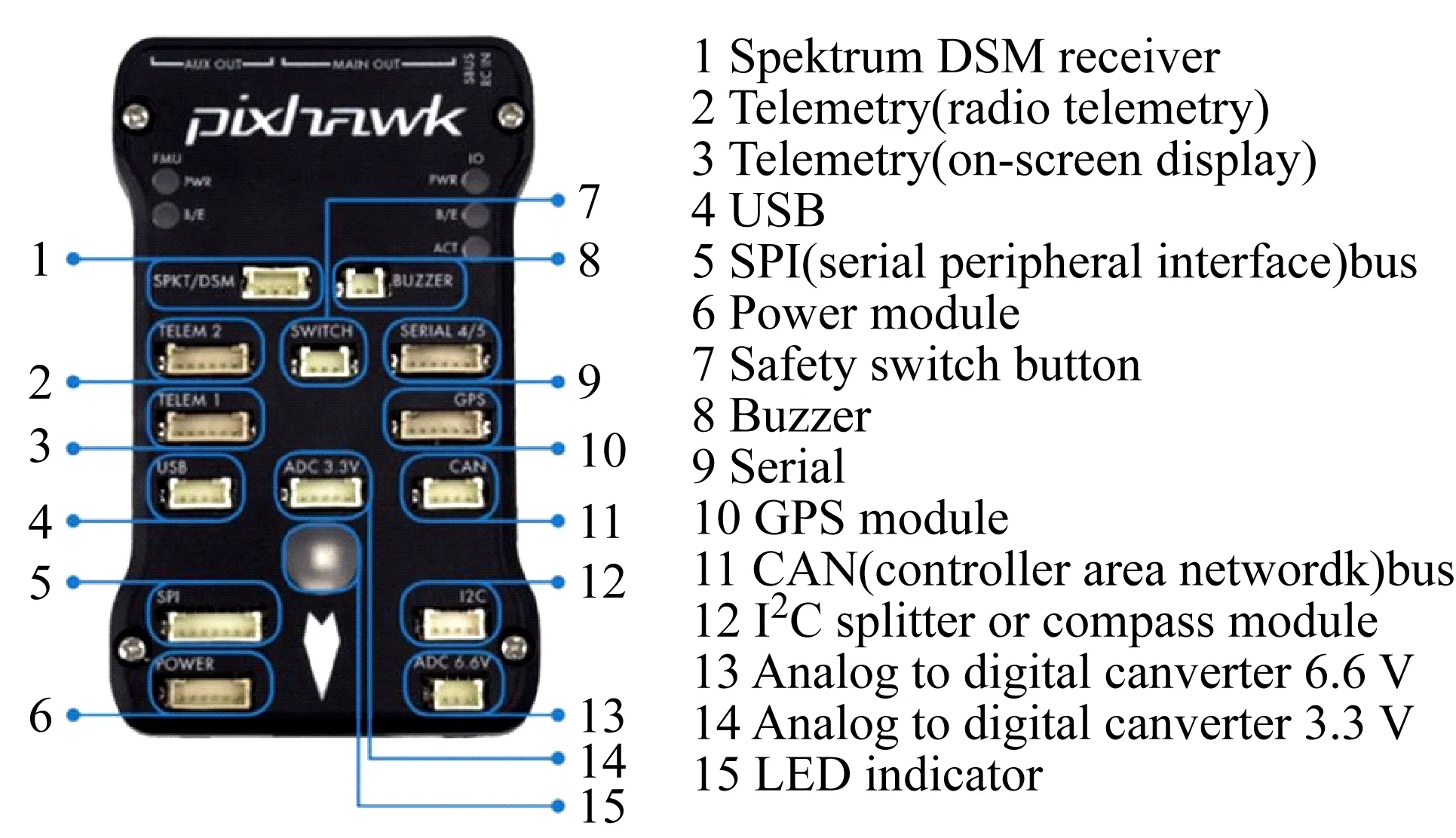
图2 飞行控制单元接口示意图
该飞行控制器采用是32 bit 的STM32F765处理器。同时Pixhawk 4上还冗余内置3组IMU,搭载了姿态传感器、磁场罗盘、气压计等,方便远程控制台实时监控飞行器姿态[6]。飞行控制单元通过UART串行接口同机载处理器进行数据通信。
(2) 机载处理器。基于NIVIDIA Jetson TX2 的机载处理器是飞行平台的核心运算模块,帮助提高无人机的在轨计算能力,以完成BSP、深度学习库、计算机视觉、GPU计算、多媒体处理等复杂人工智能实验。处理器采用基于HMP Dual Denver 2/2 MB L2以及Quad ARM A57/2 MB L2,同时配备了256颗CUDA核心。网络接口采用Realtek RTL 8153 接口;USB 接口提供2个USB 2.0 接口; 芯片尺寸: 58 mm×87 mm。
(3) 数据通信单元。通信模块使用CUAV公司的P9数据传输设备,发射功率为1 W,数据传输速率为276 Kbit/s,传输距离可达30 km。
(4) 地面远程控制台。旋翼无人机在飞行时通过机载数据通信单元同地面的远程控制软件建立双向连接。地面人员可以通过地面站自带的显示器得知旋翼无人机的飞行速度以及位姿数据信息。
3 软件设计
本系统的软件主流程如图3所示,由获取着陆区域图像、寻找特征点、判断定位信号质量、获取无人机位姿信息以及调整姿态等几部分组成。着陆命令启动后,需要先进行图像预处理,等程序完成后,视觉系统需要对输入的图像序列进行无人机运动自估计和运动补偿;最后,利用人工智能算法,对地形进行分类,选择适合作为着陆的区域和地点。
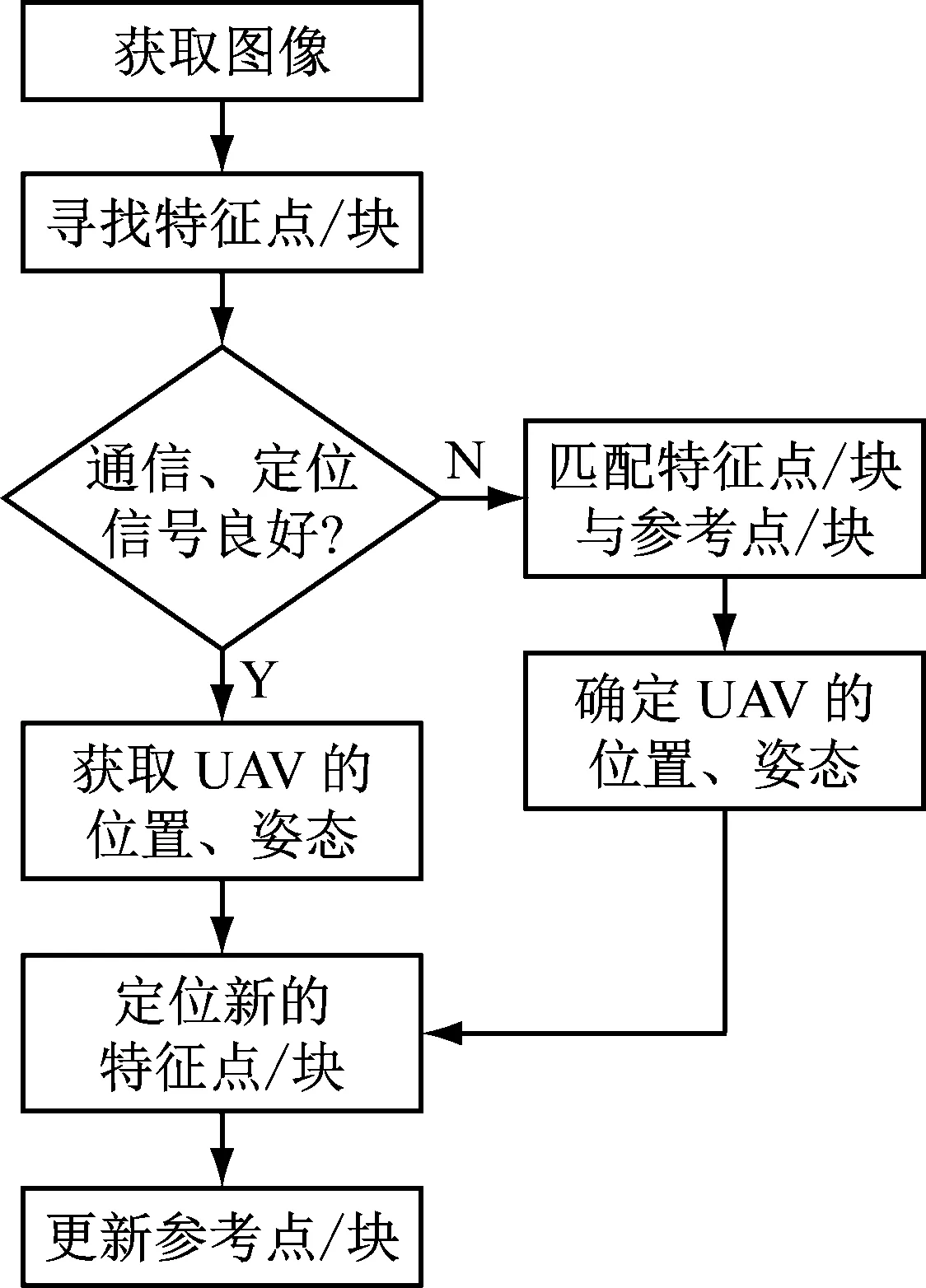
图3 视觉着陆系统的软件主流程图
旋翼无人机上的视觉传感器会采集无人机下方的图像。基于CNN的人工智能模块会持续对着陆环境进行识别并控制无人机的位姿,该控制将辅助旋翼无人机在复杂地形下的自主着陆。其中,CNN是为分析二维形状特征而设计的一个多层前馈网络模型,由输入层、卷积层、池化层、全连接层和输出层组成,这种多层感知器对平移、缩放、倾斜等形式的变形具有较高的适应性[7-9]。
采样过程中,图像的一部分作为第1层输入,通过卷积核对局部进行特征提取,再如图4所示依次传输到下一层。每个层级结构通过一组数字特征图去获取所采集图像的最显著的结构特征[10-11]。从而实现对着陆环境中的电线杆、高塔、深坑、水田以及其他威胁特征的辨识和检测(见图5)。
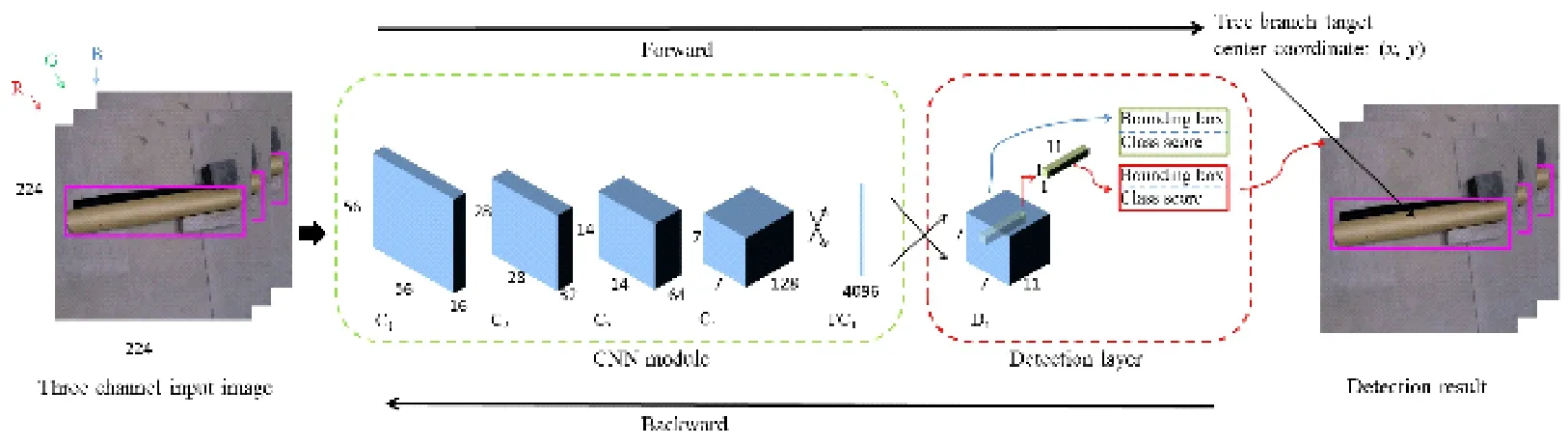
图4 基于CNN的图像采集及分类过程
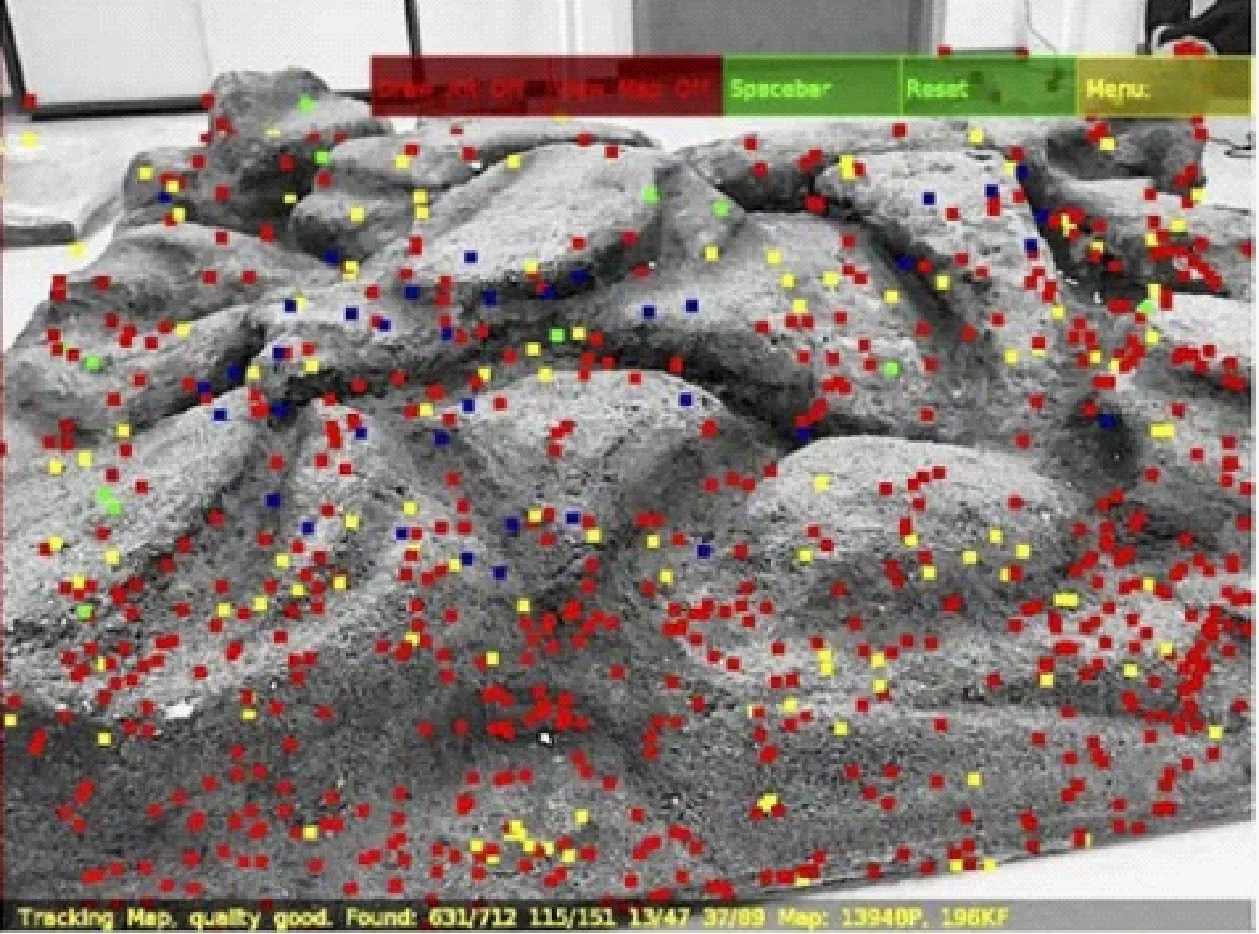
图5 着陆中障碍物识别
4 仿生着陆机构设计
通过观察鸟类标本的足部形态,测量其主要外形特征参数,建立了如图6所示的仿生爪与末端机构相互作用的数学模型,分析了仿生爪各项特征参数对其着陆性能的影响,设计了仿生着陆机构。其中:着陆面半径为R;机械爪每节厚度为H;长度为Li;接触角为α;节偏转角为θi。着陆爪在为保持无人机机身稳定需实现自锁紧,提供附着力,节偏转角需满足如下要求[12]:

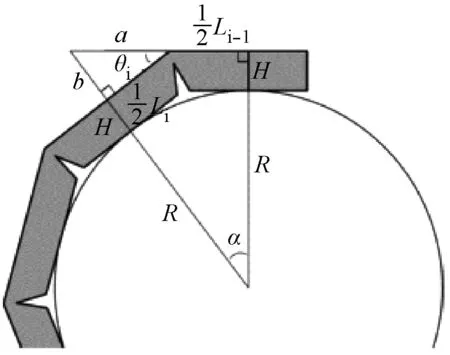
图6 仿生着陆机构原理图
通过将柔性仿生元件与弹簧进行连接,利用骨骼肌简化力学模型,根据赫芝接触关系着陆架与地面之间的作用力可表示为[13]:
其中:P为赫芝弹簧力;a为接触加速度。通过对表达式的分析,还可以确定着陆机构最大收缩力、最大收缩速度两个特性参数[14],从而优化了着陆机构设计(见图7)。
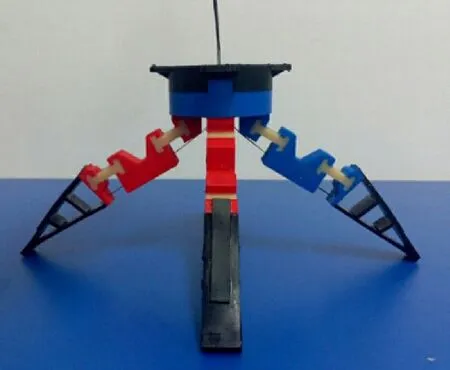
图7 仿生着陆机构设计
5 系统实现及性能测试
为了验证此套设计方案的合理性,搭建了一套完整的仿生旋翼无人机着陆系统,采用ROS操作系统编写了无人机控制系统(见图8)。该平台对无人机在着陆过程中的姿态角度以及降落速度进行动态系统测试[15]。在开放环境中搭建复杂着陆环境,并进行着陆实验(见图9)。

图8 无人机地面站控制台

图9 仿生无人机着陆实验
通过观察无人机在三维空间中的位置响应曲线(见图10)得出,当着陆指令发出后,无人机能够准确识别出着陆点,并能平稳控制无人机稳定着陆。
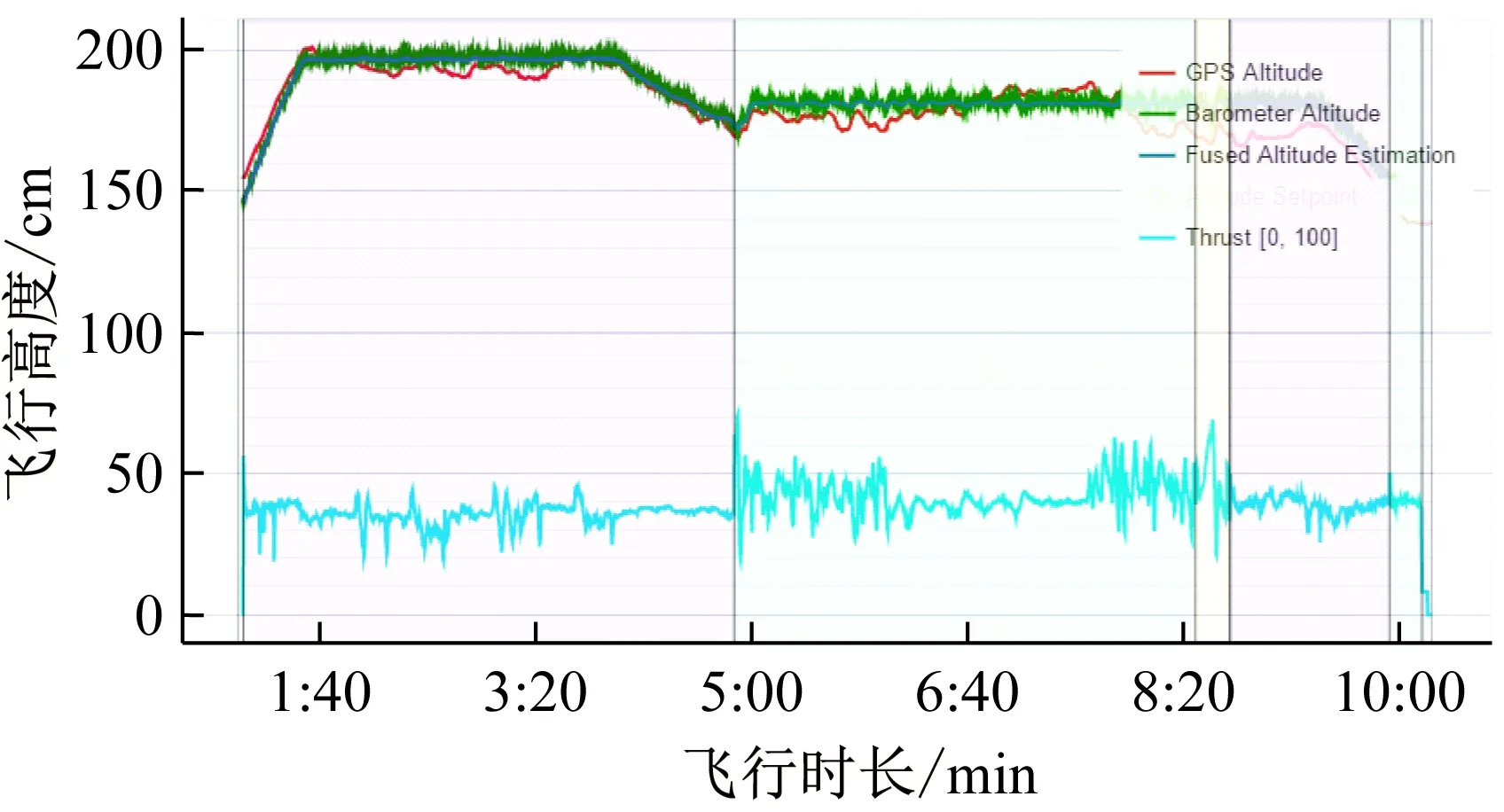
图10 仿生无人机位置响应曲线
6 结 语
研究面向无人机在远海油气田、钻井平台和船舶等非常规着陆环境下稳定着陆问题。采用理论分析、生物样本观察、建模仿真与样机研制相结合的方法,以视觉环境感知建模技术为核心,构建新型爪式着陆系统,突破无人机在结构设计、加工方法、以及智能控制等方面的关键技术问题。为促进高适应性的无人机发展提供了技术及设备保障。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
汽车零部件(2014年1期)2014-09-21
汽车与新动力(2012年1期)2012-03-25
微型计算机(2009年17期)2009-05-19
电子设计应用(2004年7期)2004-09-02
