
庭院服务机器人自主充电对接方法研究
2019-09-02 09:17李倩崔炜秦月雅彭国旗
长春理工大学学报(自然科学版) 2019年4期
李倩,崔炜,秦月雅,彭国旗
(长春理工大学 电子信息工程学院,长春 130022)
庭院服务机器人,可以实现自主巡逻、收取快递、草坪修剪、垃圾运送等功能,具有灵活、便捷的特征,将广泛应用于庭院和智能小区管理。自主充电能够使机器人在无人干预的情况下长期处于正常服务状态,为机器人的使用带来极大方便。国内外的学者对自主充电进行了广泛研究,K.L.Su和J.H.Guo等使用激光测距仪和路标指示进行机器人自动充电对接[1],成功率高达99%,但对路标指示安装位置要求严格,且激光测距精度易受外界环境干扰。Cassini等设计了一种通过光线束引导机器人与充电站进行自主充电的方法[2],该方法的导航布置复杂、成本较高、对环境适应性较差。张天昀使用光电传感器完成机器人室内定位与自动充电,使用航迹推算使得整个系统累积误差增大,同时光电传感器限制整个系统的速度[3]。黄颖等运用红外激光和摄像头辅助机器人自主充电,高效准确但作用范围小,同时增加了成本。由于室外机器人充电系统环境复杂,以上方法过多依赖室内环境,易受外界环境(阳光等)干扰使得自主充电的准确率和效率降低,黎阳生等将激光测距方法运用到室外机器人自主充电中,使用等腰三角形物体等硬件辅助消除干扰,虽然提高了成功率但增加成本和降低效率。
上述方法不能较好满足庭院服务机器人自主充电需求,本文将RFID导航技术、磁导航和九轴陀螺仪相结合,设计一种庭院服务机器人自主充电对接方法,利用蚁群算法实现了最优路径选取,具有对接速度快、受环境影响小、稳定性高、成本低等特点。
1 自主充电对接系统
本文以轮式庭院服务机器人为研究对象,庭院服务机器人自主导航定位组成结构如图1所示,机器人采用四轮结构,前两轮为驱动轮,后两轮为万向从动轮。
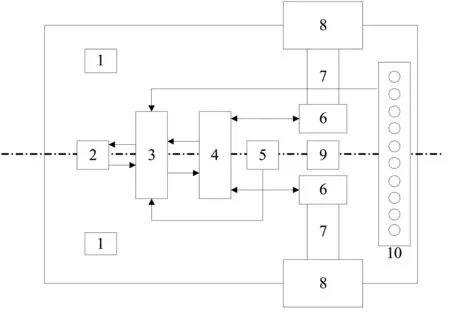
图1 机器人导航定位原理图
主控处理器通过电机驱动器控制电机运动,并通过光电编码器实时返回电机速度,实现对机器人行走速度的准确控制。在机器人检测到电量不足的情况下,停止服务任务,进入充电模式,机器人将充电命令通过WIFI模块发送给充电站,充电站接受到命令进入准备充电状态。此时机器人会根据RFID定位系统获取机器人实时位置,结合已知的电磁轨道起始位置,运用蚁群算法制定最优的导航路径。机器人运动到电磁轨道起始处,安装于底部的电磁传感器检测机器人相对于轨道的偏移量,并结合九轴姿态传感器GY953获取的机器人方向信息,得到电机控制量,电机驱动器根据控制量完成两主动轮的差速控制,实现机器人沿着电磁轨道直线运行,进而与充电站进行精准对接,通过获取充电站中3个限位开关的状态来判断对接状态,若对接成功便可开启充电模式。
2 自主充电对接方法
为了提高机器人与充电桩的对接准确率,将室外庭院环境分为对接区域和非对接区域,如图2所示,电磁导航区域为对接区域,机器人R在该区域进行姿态调整以便达到准确对接[4],除电磁导航以外区域为非对接区域,该区域中机器人只需要导航至O处,可以忽略机器人姿态问题,因此本文将对接过程分为远距离导航和近距离对接。

图2 庭院环境简化结构
2.1 远距离导航
为了方便对接区域的准确对接,在非对接区域,机器人将导航目标位置设为图2所示的O处,机器人到达O处后,停止远距离导航进入近距离对接任务。
在非对接区域,获取精确的机器人位置至关重要,精确的位置可以有效减少对接调整时间。当机器人电量低于阈值时,触发充电任务,由于机器人可能在庭院的任何位置,此刻首要任务就是确定机器人的位置。将3.5GHz超带宽(UWB)的DWM1000射频传感器安装于庭院的四个角落和轮式机器人中心处,A、B、C、D为阅读器,机器人上为有源电子标签,为了消除射频传感的钟差,运用基于TOA的不对称双向测距[5]获得电子标签距离信息,如图3所示。
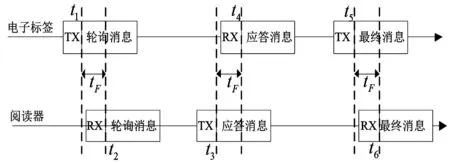
图3 不对称双向测距原理图
不对称双向测距飞行时间tF为:

从而得到距离d=c×tF,其中,c为光速。
机器人上的电子标签依次轮询阅读器A、B、C、D,测得电子标签与四个阅读器之间的距离依次为dA、dB、dC、dD。
采用极大似然估计实现机器人定位。已知4个阅读器的坐标分别为A(xA,yA),B(xB,yB),C(xC,yC),D(xD,yD),假设机器人坐标为(x,y),建立机器人与四个阅读器的距离方程组[6]为:

将方程组前三个方程分别减去第四个方程,得到线性化方程为:

其中:
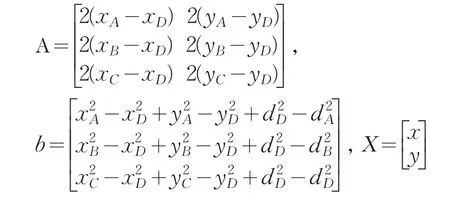
使用最小二乘法求解式子(3)可得到机器人的坐标位置值。
获得机器人坐标后,首要任务是将机器人导航至目标位置O处。此时会有两种情况:
庭院中障碍物均是固定位置,对接区域属静态场景。采用栅格法[7,8]建立庭院机器人的运动环境模型,为了机器人能安全通过,障碍物边界未占满栅格,也认为占据整个栅格。将非对接区划分成等间隔栅格,且栅格的大小由机器人决定,机器人不能通过的地方为实心区域,可通过地方为空心区域,建模如图4所示。
图4中每一个栅格都可用坐标(x,y)来唯一标识,栅格化后,机器人只能向8个方向运动,由于传统的蚁群算法存在容易陷入局部最优路径或收敛速度慢等问题,于是在栅格路径选择上使用改进蚁群算法[9,10]。

图4 栅格法环境模型图


其中,r为栅格(i,j)下一个可选栅格,b为障碍物,α为信息启发因子,β为期望启发因子,[γ(i,j)b(t)]-k=mind[(i,j),b]是蚂蚁从栅格(i,j)到障碍物b的权重倒数,η(i,j)(m,n)(t)为启发函数。
由于蚂蚁分泌的信息素会随着时间变化逐步挥发,假设ρ(0<ρ<1)为信息素衰减程度,1-ρ为留存的信息素程度。因此完成一次遍历便对路径中信息素按下式进行更新:

其中,M、N为寻找到最优路径[11]的蚂蚁个数和最长路径蚂蚁个数,lmin、lmax为最优和最长路径长度期望值。
当庭院中存在移动障碍物时,通过障碍物携带的电子标签,实时获取其位置。在静态全局路径规划的基础上,利用蚁群算法沿着全局路径的方向进行局部寻优[12],从而有效地避开动态障碍物,实现动态环境下快速达到目标点。
2.2 近距离对接
当对接不精确时,容易发生接触不良,损坏机器人和充电站。因此,机器人必须进行近距离精准对接,通过磁传感器、九轴传感器获得机器人的方向和位置信息,对该信息进行分析处理,完成近距离对接任务。
在非对接区域,没有考虑机器人姿态,进入对接区域时,轮式机器人方向具有随机性或电磁传感器没有检测到电磁轨道,因此,在对接区域必须对机器人姿态进行修正,以达到满足自主充电系统对接要求。近距离对接过程如下:
(1)机器人进入对接区域,即机器人处于O处,启动近距离对接程序;
(2)通过传感器获得机器人方向和位置信息,判断机器人是否与充电站墙壁垂直,机器人是否与电磁轨道相交;存在如下判断结果:
①方向垂直,机器人与电磁轨道相交,执行步骤(3)。
②方向垂直,机器人未与电磁轨道相交,或方向不垂直,机器人未与电磁轨道相交,此时机器人原地顺时针转动。转动过程中,电磁传感器检测到磁条,停止转动执行步骤(2);转动过程中,电磁传感器没有检测到磁条,开启RFID定位,获取机器人位置进行导航,若与目标O处之间没有障碍物,机器人直接运动至O处,若有障碍物运行蚁群算法进行路径规划,以最优路径引导至O处后,执行步骤(1)。
③方向不垂直,机器人与电磁轨道相交,以充电站到O处的方向为正方向。与轨道成锐角,机器人原地逆时针转动,直到电磁传感器再一次检测到磁条,停止转动执行步骤(2);与轨道成钝角,执行步聚(3)。
(3)机器人通过电磁传感器检测相对于轨道的偏移量,结合九轴传感器检测到的角度偏差量,计算两轮差速控制量,运用模糊控制进行近距离处理,执行步骤(4);
(4)与充电站对接过程中,通过3个限位开关的状态反馈充电对接状态:①限位开关C未触发,Z、Y至少触发一个,说明没有准确对接,机器人直接向后倒退0.8m,执行步骤(2);②限位开关C、Z、Y均触发,说明正确对接,执行步骤(5)。
(5)机器人与充电站完成对接,停止移动,进行充电任务。

图5 限位开关安装位置
经过上述5步,即可完成机器人与充电站精准对接,实现安全可靠的充电条件。庭院服务机器人自主充电对接整个流程如图6所示。

图6 对接流程图
3 目标对接仿真
为了验证该自主充电对接方法的可行性、准确性以及实用性。对机器人导航能力进行仿真,其中路径规划参数:蚂蚁数m=50,迭代次数n=100,信息素增加强度Q=1,信息启发因子α=1,期望启发因子β=7,信息素衰减程度ρ=0.3。得到三条不同起始位的置最优路径如图7所示,图8中收敛曲线显示,60次迭代后,曲线已经收敛。

图7 蚁群算法最优路径
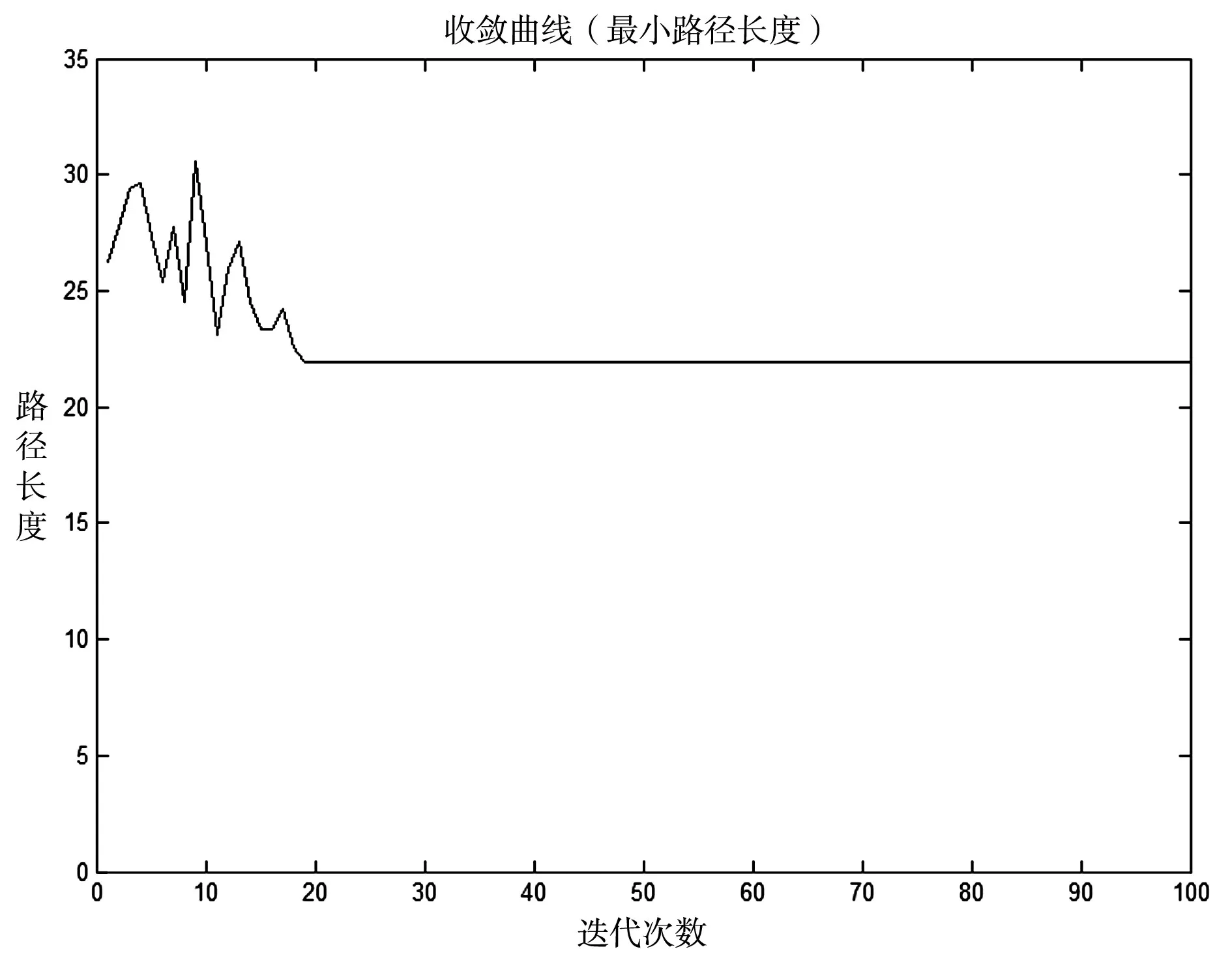
图8 蚁群算法收敛曲线
忽略机器人在弯道上速度的衰减,不考虑远距离导航和近距离对接过程的切换时间,设对接区长度为1m,机器人速度为20cm/s。分别取与电磁轨道成 0°、30°、45°、60°和 90°五个方向的6个不同距离完成对接时间与距离关系仿真,如图9所示,其中最下边的线段表示无障碍物时对接时间与距离关系曲线,其余曲线存在凸起是由于出现障碍物造成的。总体上,对接时间基本上与距离成正比,表明该对接方法具有良好的鲁棒性和可行性。
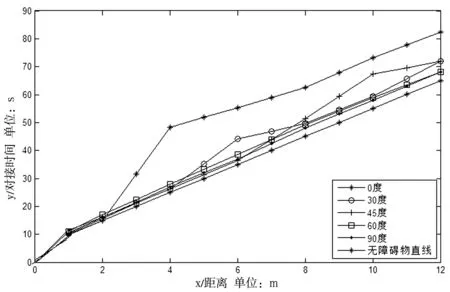
图9 对接时间与距离和角度关系
为了检验该对接方法的实用性。本实验选择大小为40cm*50cm、运行速度为20cm/s的轮式服务机器人,在面积为18m*18m的庭院环境中,设置如图2所示的障碍物进行试验。
根据上述仿真结果,蚁群算法参数设置为:m=50,n=60,Q=1,α=1,β=1,ρ=1,RFID定位采用均值法来提高定位准确性。共进行50次试验,成功对接50次,达到预期期望。说明该对接方法具有高成功率。
4 结论
本文提出的基于有源RFID远距离定位导航、电磁传感器和九轴传感器信息融合技术的近距离对接以及限位开关反馈对接状态的自主充电对接控制方法,可适应室外多变的恶劣环境。在室外多变环境下,可以很好解决庭院服务机器人自主充电对接成功率低、成本高、稳定性差等问题。通过仿真运行效果验证该自主充电对接方法的可行性,在多次试验中,成功实现了机器人在室外环境下自主充电对接,具有良好的成功率和稳定性,仿真和实际运行表明该对接方法满足室外庭院服务机器人自主充电对接设计需求。
猜你喜欢
机电安全(2022年5期)2022-12-13
科技创新与应用(2021年31期)2021-11-09
环球时报(2020-12-08)2020-12-08
房地产导刊(2020年6期)2020-07-25
中北大学学报(自然科学版)(2020年4期)2020-07-13
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
弹箭与制导学报(2015年1期)2015-03-11
雷达学报(2014年4期)2014-04-23
