基于离散一致性算法的直流微电网电压控制策略
2019-09-02 08:35:22陈金锋宣振文
浙江电力 2019年8期
陈金锋,贾 科,宣振文,朱 瑞
(新能源电力系统国家重点实验室(华北电力大学),北京 102206)
0 引言
近年来,随着新能源发电技术的发展以及能源和环境问题的日益凸显,以清洁能源为主的分布式发电方式得到了广泛关注。为解决分布式电源的可靠入网问题,微电网的概念应运而生[1]。微电网既可以并网运行或孤岛运行,也可以在2种模式之间进行无缝切换[2-3]。与交流微电网相比,直流微电网孤岛运行时只需调整自身的母线电压和功率分配便可保证系统稳定,可控性好[4],但独立直流微电网电压控制策略的研究仍需要进一步完善[5]。
为保证微电网直流电压的稳定,需要一套行之有效的电压控制策略。微电网孤岛运行时,由于线路阻抗分布不均,传统下垂控制难以在满足均流的同时保持直流电压的稳定。现有的微电网电压控制方法主要有:通过二次控制补偿下垂曲线引起的电压降落[6];通过增加储能单元或者电压平衡器的方式对系统有功功率进行平衡。现有的二次补偿改进方法主要有:平移曲线法、调整曲线系数法[6]和基于多智能体的分布式控制[7],主要是对发电单元的输出功率进行调整,同时解决直流电压偏差的问题。利用优化补偿算法对传统下垂控制进行改进,可以对多个控制目标进行优化管理[8-9],但大多补偿算法是基于系统全局通信的,这对发电单元之间通信系统的可靠性提出了较高要求,局部通信故障就可能导致系统瘫痪。此外,利用超级电容可以快速补偿母线功率缺额的高频部分[10]或者利用电压平衡器有效平衡直流母线间的有功功率[11],从而维持直流母线电压的稳定,但是这2 种方法的额外附加装置增加了系统的建设成本。
本文建立了独立光-储直流微电网模型,各发电单元之间采用相邻通信,利用离散一致性算法迭代所得的系统直流电压平均值,实现直流微电网的电压稳定控制。在揭示传统下垂控制存在均流和稳压矛盾的基础上,提出了基于离散一致性算法的直流微电网电压控制策略。通过修正直流母线电压参考值,补偿由传统下垂控制引起的直流母线电压的下降。光伏电池采用最大功率跟踪控制,蓄电池单元采用恒压控制。在负荷功率波动和外界环境条件发生变化2 种不同情况下,均能保持直流母线电压的恒定和系统有功功率的平衡, 具有较好的稳定性和可靠性。MATLAB/Simulink 仿真结果验证了本文所提控制策略的有效性。
1 直流微电网中的下垂控制
1.1 直流微电网系统简介
本文以图1 所示的直流微电网系统为研究对象,3 个光伏发电单元和1 个蓄电池单元经过升压电路并联接到直流母线上。
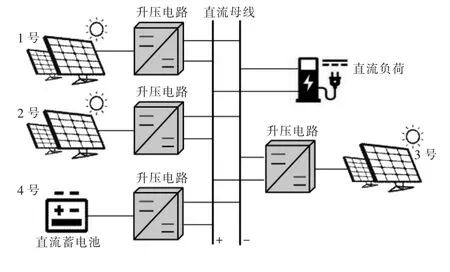
图1 直流微电网结构
稳态运行时,光伏列阵采用MPPT(最大功率跟踪控制);蓄电池采用恒压控制,稳定直流母线的电压。当系统受到扰动时,为了保持直流母线电压的恒定,蓄电池通过自身的充放电维持系统中的有功平衡,光伏列阵通过调节端口电压,在输出P-V 特性曲线上寻找新的平衡点,及时调整光伏列阵输出的功率。
1.2 下垂控制原理
图1 所示直流微电网包含4 个发电单元,各发电单元均等效为电压源串联电阻的形式,线路和负荷采用纯电阻模型,其等效电路模型如图2所示。

图2 四单元直流微电网等效电路
由图2 可知,要使变流器的输出功率与各自的额定功率成正比,各发电单元的电压电流应满足:

式中:Us为输出电压等效值;Im为发电单元m 的换流器输出电流;Um为发电单元m 的换流器输出电压;Rvm为虚拟电阻;Reqm为线路等效电阻;Rvn为发电单元n 的虚拟电阻;Reqn为发电单元n的线路等效电阻;Rload为负荷等效电阻。化简之后可得:

由式(2)可知,当线路电阻Reqm未知或者发生变化时,很难满足式(2),即各发电单元难以按照额定容量分配功率,而且当发电单元的输出电流增大时,由于虚拟电阻的存在,变流器输出电压会降低。因此,传统的下垂控制难以在满足式(2)的同时,保证直流母线电压的恒定,然而电压的稳定是直流微电网稳定运行的前提条件。
1.3 传统下垂控制的局限性
在独立直流微电网中,并联的变换器之间会存在等效阻抗不相等的现象,而阻抗不相等会造成变换器输出电流不等,从而在变换器之间形成环流,而环流对微电网系统的稳定运行有较大影响,应尽量避免。下垂控制通过在变流器和直流母线之间加一个虚拟电阻的方式可以减小环流,下垂曲线公式为:

传统下垂控制中,若各发电单元下垂系数相等而参考电压不等,由于电流分配不均会有环流;若参考电压相等,则下垂系数越大均流效果越好,但电压下降也越多,所以在均流与稳压之间存在矛盾,这就需要选择合理的下垂系数。
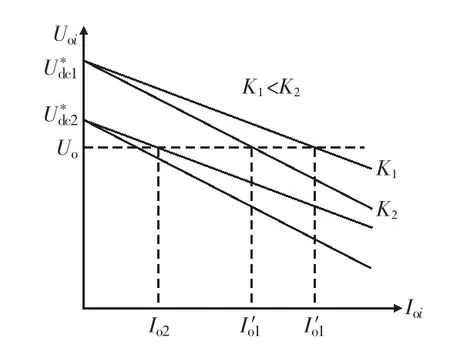
图3 下垂控制原理
因此,下垂控制尽管控制方式简单,无需发电单元之间相互通信,且可即插即用和拥有较好的扩容能力,但是由于线路电阻未知,导致下垂控制会引起直流母线电压的下降和各发电单元之间电流分配不均等问题,仍需进一步改进。
采用离散一致性算法对传统下垂控制进行二次电压调节,微电网各单元采用相邻通信,利用离散一致性算法迭代所得到的系统直流电压的均值,对控制外环直流电压参考值进行不断修正,弥补下垂控制引起的电压降落,维持直流电压的稳定。
2 基于离散一致性算法的下垂控制
独立直流微电网的控制系统可以分为2 级,第一级为发电单元级控制,各单元通过自身的控制策略调整运行状态;第二级为系统级控制,通过协调各发电单元的输出功率和负荷功率,满足系统有功功率平衡,保持直流母线电压的恒定。
2.1 直流微电网发电单元级控制
2.1.1 光伏电池单元的控制
光伏列阵采用MPPT 控制,选用变步长电导增量法,在远离MPP(最大功率点)时,步长较大;而靠近MPP 时,步长较小。这样既保证了收敛精度又保证了收敛速度,具有良好的跟踪效果。本文引进步长因数ω,用来调节步长大小,即Uk+1=Uk+ωΔU。ω 取值范围为[0,1],本文选用功率差值ΔP 决定步长因数大小[12],如式(4)所示。
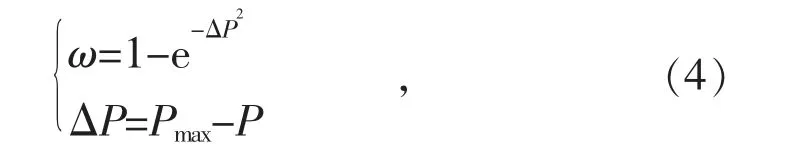
式中:Pmax为光伏最大功率;P 为光伏实际输出功率。
由式(4)可知,有功功率差值越大,则步长因数ω 也越大,从而能迅速跟踪到MPP 附近,控制框图如图4 所示。
由图4 可知,当光伏运行点处于P-V 特性曲线上升阶段时,didc/dudc>-idc/udc,则选择信号N=1,此时Uk+1=Uk+ωΔU,直流电压扰动方向为正方向;当光伏运行点处于P-V 特性曲线下降阶段时,didc/dudc<-idc/udc,则选择信号N=0,此时Uk+1=Uk-ωΔU,直流电压扰动方向为负方向。
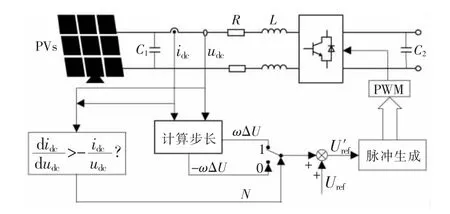
图4 光伏列阵控制框图
2.1.2 蓄电池单元的控制
蓄电池具有可靠性高、成本低的优点,但是其工作寿命短、功率密度低,这使得蓄电池更适用于微电网等小容量分布式发电系统。
当直流微电网处于孤岛运行模式时,蓄电池的作用主要是维持母线电压的恒定,因此蓄电池采用恒压放电模式,而为了保护蓄电池,防止端口电流过大损坏蓄电池、缩减其使用寿命,应对电流大小进行限制。本文采用带有电流限制的电流电压双闭环充放电控制,具体控制流程如图5所示。

图5 蓄电池改进恒压充放电控制流程
蓄电池可能工作在充电或放电状态,因此采用双向DC-DC 电路。由于母线电压高于蓄电池端口电压,当蓄电池放电时,双向DC-DC 电路工作在升压电路状态; 当蓄电池充电时,双向DC-DC 电路工作在降压状态。双向DC-DC 变换器结构如图6 所示。
2.2 基于离散一致性算法的电压控制策略
在系统出现负荷扰动或外界环境变化的情况下,微电网仍需保持直流母线电压稳定。因此本文采用基于离散一致性算法的电压控制策略。
2.2.1 离散一致性算法原理

图6 蓄电池双向DC-DC 变换器结构

将式(5)写成矩阵形式即为:

式中:矩阵A 为系统状态转移矩阵;aij为矩阵A的元素。若单元i 和单元j 之间有相邻通路,则aij>0;反之,则aij=0。若矩阵A 取为双随机矩阵,则一致性收敛于系统中初始状态的平均值。双随机矩阵A 中元素aij与系统中各单元的拓扑结构相关联[9],如式(7)所示。
离散一致性算法是一种仅需各个分布式发电单元建立一种弱通信的算法,其目的主要是使系统中的状态变量趋近于初始状态的平均值。本文选取一阶离散一致性算法来修正电压外环的电压参考值,收敛条件相对简单且收敛速度较快[13]。
一阶离散一致性算法中,状态变量ui代表微电网中发电单元i 的端口直流电压,每个分布式发电单元需要本地信息和与其相邻的邻居信息[14]。当所有分布式单元的状态变量相同时,则称系统收敛。具体算法如式(5)所示。

2.2.2 基于离散一致性算法的电压控制
本文采用的是基于离散一致性算法的电压控制策略,每个发电单元只与其相邻的单元进行弱
式中:max(xi,xj)为本单元及其相邻单元拥有邻居数目的最大值;Mi为与单元i 相邻的单元的序号集合。此时,系统的状态变量收敛于系统初始状态的平均值,即:通信。这样既能取得系统的最优解,又能避免因局部通信故障而导致的系统瘫痪。发电单元根据所得相邻单元的信息,计算得出系统直流电压的均值,用来修正下垂控制中电压环外的参考电压,以此来补偿由于下垂控制的引进而导致的母线电压降落。
本文所提的一阶离散一致性算法主要用于对电压环中参考电压的选取,各发电单元的相邻通信示意图如图7 所示。
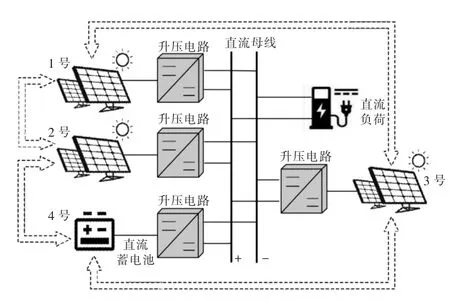
图7 发电单元相邻通讯示意图
根据微电网的拓扑结构可以算出离散一致性算法中的双随机矩阵A 为:
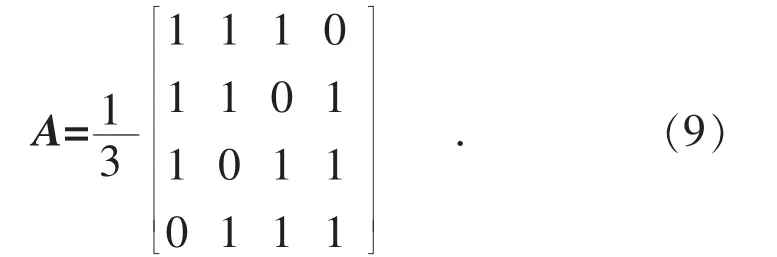
由式(9)可知,双随机矩阵A 的对角元素均不等于0,即使在通信系统存在延时的情况下,一致性算法也仍能可靠收敛[9]。

由式(10)可知,基于离散一致性算法的下垂控制能够在一定程度上提高母线电压的参考值,补偿由下垂控制引起的电压降落,参考电压控制框图如图8 所示。
当2 次迭代差值满足式(11)时,控制信号signal=1,将作为最终迭代结果,并利用此参考值对直流电压进行跟踪控制,其中ε 为误差系数。
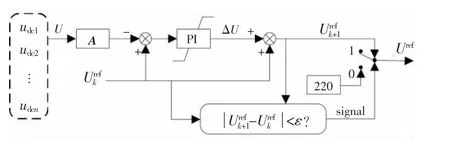
图8 基于离散一致性算法的迭代框图

3 仿真与分析
为了验证所提电压控制策略的有效性,本文在Simulink 中搭建了图1 所示的独立直流微电网模型。3 个光伏发电单元和1 个蓄电池单元经升压后各自并联到直流母线上,负荷采用直流纯电阻负荷,系统详细参数如表1 所示。
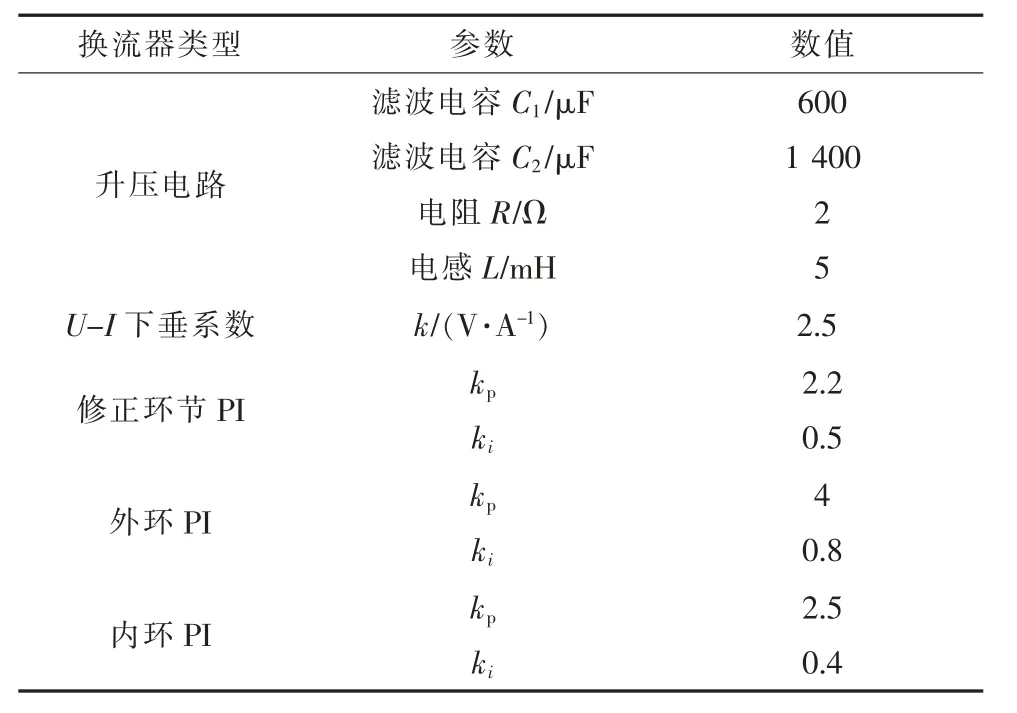
表1 系统仿真模型中详细参数
3.1 光照强度变化
直流微电网运行过程中,光照强度可能会发生变化,假定初始条件光照强度S=1 000 W/m2,负荷为纯电阻负荷。当t=0.3 s 时,光照强度为S=800 W/m2;当t=0.6 s 时,光照强度变为S=600 W/m2。仿真时间为1 s,得到直流母线电压和负荷有功功率波形如图9 所示。
由图9(a)可知,本文所提电压控制策略与传统下垂控制相比,能较好地减少直流电压的波动。光照强度条件发生变化时,发电单元采用相邻通信的方式,迭代得到系统直流电压的均值,从而修正控制外环中直流电压的参考值,使得直流母线电压始终稳定在220 V±5%UN的安全范围内,且直流电压响应速度较快。由于采用纯电阻负荷,由图9(b)可知,负荷功率的变化与直流电压的变化保持一致,负荷功率波动较小,系统可以稳定运行。
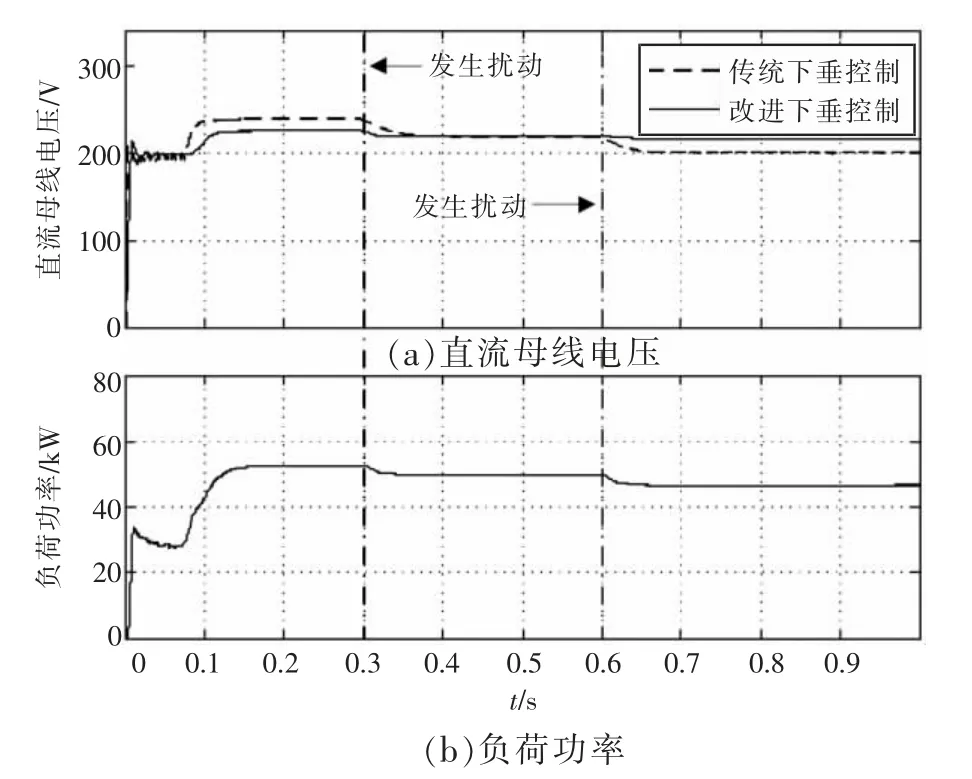
图9 光照强度变化时系统响应
3.2 环境温度变化
直流微电网运行过程中,可能会受到环境温度变化的扰动,假定初始条件下环境温度为T=35 ℃,负荷为纯电阻负荷并不发生变化。当t=0.3 s 时,环境温度变为T=20 ℃;当t=0.6 s 时,环境温度恢复为T=35 ℃;仿真时间为1 s 时,得到直流母线电压和负荷有功功率波形如图10 所示。

图10 环境温度变化时系统响应
由图10(a)直流母线电压变化可知,与传统下垂控制相比,基于离散一致性算法的电压控制策略能减小直流电压的波动,使得母线电压始终稳定在220 V±5%UN的安全范围内,波动较小且响应速度较快。此外,环境温度越低,光伏列阵输出功率越大,直流母线电压会随之升高。
3.3 恒负荷功率变化
初始微电网中负荷为40 kW 恒功率负载,当t=0.3 s 时,投入10 kW 恒功率负荷,当t=0.6 s 时,再投入10 kW 恒功率负荷,仿真时间为1 s。在这种情况下,系统中直流母线电压和光伏单元发出的功率如图11 所示。
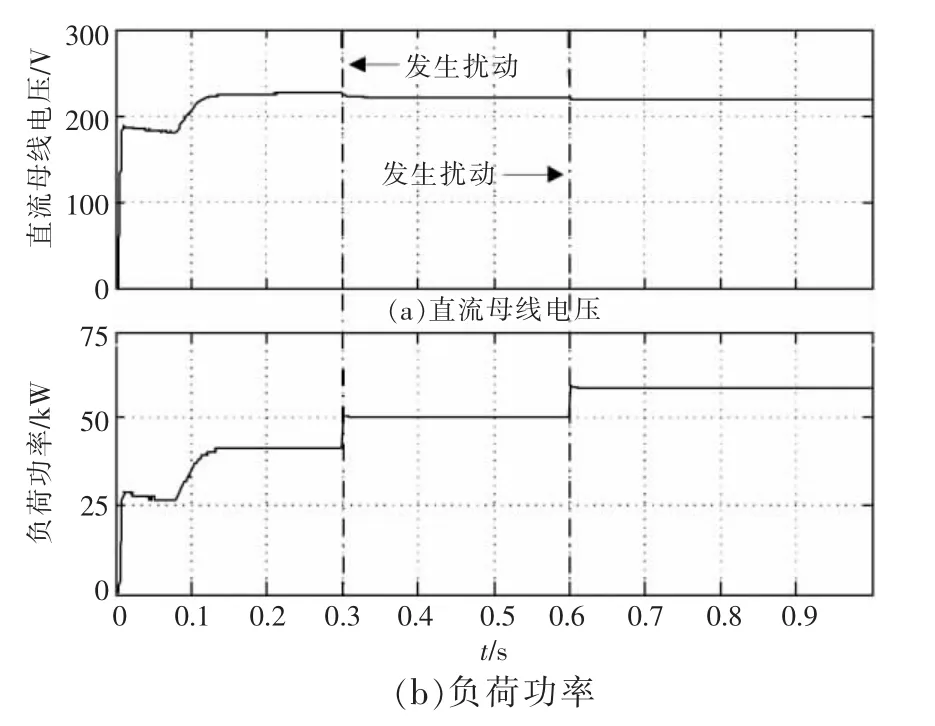
图11 恒功率负荷变化时系统响应
由图11 可知,当恒功率负荷变化时,直流母线电压始终稳定在220V±5%UN范围内,而且当负荷增大时,母线电压稍有下降,波动较小且响应速度比较快,满足直流微电网需要保持母线电压恒定的条件。为了满足负荷需求,当负荷增加时,光伏发电单元的输出功率增加,从而满足系统有功功率的平衡。由仿真波形可知,本文所提的改进控制策略对于负荷的突变具有较好的稳定性和响应速度。
当负荷功率变化时,外界环境条件不变,因此光伏运行P-V 特性曲线没有发生变化,光伏单元始终运行在最大功率点处,如图12 所示。可以看出,光伏列阵输出功率能较好地稳定在最大功率点处,验证了变步长电导增量法的有效性。
4 结语
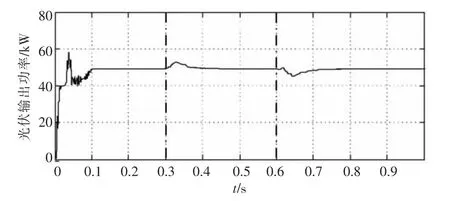
图12 光伏列阵输出有功功率
本文建立了光-储独立直流微电网模型,光伏单元采用MPPT 控制,储能单元采用带有限流的恒压控制。发电单元间采用基于离散一致性算法的电压控制策略,仅需要相邻单元通信就可以迭代得到系统直流电压的平均值,进而修正控制外环直流母线的参考电压,补偿由传统下垂控制引起的直流母线电压的下降,实现直流微电网的电压稳定控制。通过仿真分析,当外界环境条件发生变化和负荷功率有波动时,均可以保持系统直流母线电压在安全范围内。微电网具有良好的稳定性和响应速度,验证了本文所提控制策略的有效性。
猜你喜欢
公民与法治(2022年5期)2022-07-29 00:47:28
测控技术(2021年10期)2021-12-21 07:10:20
教学考试(高考物理)(2021年5期)2021-11-08 10:31:22
中医眼耳鼻喉杂志(2021年1期)2021-07-22 07:38:14
通信电源技术(2018年3期)2018-06-26 06:33:32
燕山大学学报(2015年4期)2015-12-25 02:19:49
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年10期)2015-04-09 11:48:02
电测与仪表(2015年5期)2015-04-09 11:30:46