低成本μ-blox单频多系统GNSS接收机的定位性能分析
2019-08-30 08:42:30龙驰宇温强
全球定位系统 2019年4期
龙驰宇, 温强
(1. 武汉大学 测绘学院,湖北 武汉430079; 2. 武汉大学 卫星导航定位技术研究中心,湖北 武汉430079)
0 引 言
全球卫星导航系统(GNSS)定位结果受接收机和天线等硬件的影响,面向不同市场应用的接收机在稳定性、接收信号质量和卫星信号可观测性等方面会表现出很大的差异[1-2]. 因此,在同样的环境条件下,GNSS定位精度的高低受制于接收机和天线本身的卫星信号处理能力. 当前的GNSS接收机主要分为用于消费市场的低成本接收机和用于科研、工程领域的测量型接收机. 测量型接收机由于使用了高性能的硬件以及复杂的信号跟踪处理算法[3],一般能够同步跟踪双频甚至更多频的多系统载波相位、伪距和多普勒等观测值. 同时,测量型接收机配有高精度天线,可以更好地抑制多路径效应等误差的影响,从而获得更高质量的观测信号. 因此,测量型接收机在信号可观测性、稳定性以及观测信号质量方面表现优异,可以实现厘米乃至毫米级的高精度定位. 相比之下,用于大众市场的低成本接收机一般仅能提供米级的定位精度[4-5]. 由于接收机成本的限制,目前市场上新型主流的低成本GNSS接收机仅能接收单频双系统GPS/GLONASS的观测数据,并且所使用的多是低成本天线,其多路径噪声抑制能力较差,并且具有较低的信噪比.
测量型GNSS接收机虽然可以提供很高的测量精度,但是由于其价格昂贵,体积和质量较大,超过了大众消费市场的成本承受能力,并且无法安置在平台较小的设备上,从而制约了其应用[6],因此低成本高精度接收机的研发及其数据处理理论的发展成为现在位置服务市场的迫切需求. 截至目前,面向大众市场的μ-blox接收机不仅成本低,能够为大众市场所接受,而且体积质量都很小,可以满足小型平台对GNSS接收机对体积和载荷的限制性要求[7],为消费市场的各种应用实现提供了较好的备选方案.
本文基于μ-blox M8P低成本GNSS接收机进行测试,分析其观测数据质量与静态模式和车载动态模式下的单频载波相对定位的性能,为基于载波的低成本单频GNSS高精度定位的实际应用提供有益参考.
1 观测模型
GNSS单频伪距和载波相位的观测方程一般表示为[8]

(1)

GNSS定位方式主要包括单点定位和相对定位,且基于不同类型的观测值可提供不同量级的定位精度. 其中基于载波相位观测值的相对定位和精密单点定位(PPP)技术是实现GNSS高精度定位的主流技术[8]. 基于载波相位观测值的相对定位,接收机端和卫星端的钟差、硬件延迟以及卫星轨道误差被消除,空间相关性较强的电离层延迟和对流层延迟被削弱甚至可忽略不计,因此基于短基线的载波相对定位通常可以实现厘米级甚至毫米级定位精度. 本文将采用相对定位模式对低成本接收机的定位性能做评估分析.
2 实验与分析
本文基于低成本GNSS接收机和低成本贴片天线的实测数据,首先对数据质量进行分析,然后进行静态定位和动态车载定位性能分析. 所使用的低成本接收机和天线为可以接收单频GPS/GLONASS双系统观测数据的新型μ-blox M8P接收机及其配带的ANN-MS贴片型天线.
2.1 静态实验测试
为了测试μ-blox M8P接收机静态环境下能够达到的定位精度,本实验在较为开阔的环境进行了17个小时静态连续观测. 数据采集时间为2018年6月4日07:00:00协调世界时(UTC)至2018年6月4日24:00:00 UTC,观测值为单频GPS/GLONASS伪距观测值和载波相位观测值,采样率为1 Hz. 数据采集地点为武汉大学信息学部教学实验大楼楼顶,μ-blox M8P和Trimble NetR9观测条件一致. 在测试前已经通过双频接收机数据解算精确测定两台接收机天线所在位置坐标,精度可达2 mm, 可以作为两台天线位置的参考真值.
2.1.1 数据质量分析
本节将从载噪比、伪距及载波相位观测噪声等方面分析低成本接收机μ-blox的数据质量.
1)载噪比
接收机测量的载噪比是指载波信号与噪声的能量密度之比,与信号强度息息相关. 载噪比是信号在整个传输过程中经过增益和损耗的结果,受到卫星有效载荷、卫星天线、传播路径、接收机等的影响[9]. 因此,通过与相同测试环境下的高精度接收机的载噪比比较,可以反映出低成本接收机的观测信号强度和质量.
如图1所示,对比了两种接收机测量的GNSS载噪比与高度角的关系,其以5°为单元划分0°~90°高度角,统计每单元内两种接收机所接收的所有GPS和GLONASS卫星信号载噪比的均值.其中不同形状代表不同的接收机和不同的卫星系统. 如图1中高度角37.5°处的星形点表示μ-blox接收机所接收的高度角在35°~40°内的GPS卫星的信号载噪比均值. 除卫星高度角在10°~15°外,Trimble接收机所测量GPS信号载噪比均略大于μ-blox接收机所测量的GPS信号载噪比,两种接收机所测量GLONASS信号载噪比值相近. 除个别高度角区段,两种接收机在同等高度角下测量的GLONASS信号载噪比值均小于GPS信号载噪比值. μ-blox接收机接收到的信号载噪比随高度角降低而减小,这与Trimble接收机相似,所以μ-blox接收机可采用与测量型接收机同样的观测值定权方式,即高度角定权.

图1 Trimble和μ-blox的GNSS信号载噪比与高度角关系(其中R代表GLONASS卫星,G代表GPS卫星)
2)观测值噪声
伪距噪声和载波相位噪声可用于评估接收机观测质量. 为了确定观测值的噪声,本文采用三阶导数法[10]. 三阶导数法的原理是假定观测值的高频信息等价于噪声,通过对观测值的微分来确定观测值的噪声. 该方法使用连续的四个历元进行差分,消除了大气延迟、部分多径误差和几何距离等低频信息. 在归一化后,三阶导数的标准差可以被用作观测值噪声的度量[11].
用CP(i)表示历元i的载波相位测量值,CPN表示载波相位噪声,用三阶导数法计算CPN的公式如下:
CPN=

(2)
用P(i)表示历元i的伪距测量值,PN表示伪距噪声,用三阶导数法计算PN的公式如下:
PN=

(3)
三阶导数法解算观测噪声可以自动排除测量偏差等信息,但在估计载波相位噪声的时候,有两点需要注意.第一点是,低成本接收机的钟噪声往往具有与载波相位热噪声相同甚至更高的数量级,这意味着三阶导数法无法分离钟噪声和相位热噪声.第二点是,载波相位测量值中可能存在周跳,当探测到周跳时需要将其从载波相位测量值中排除.
图2和图3分别示出了Trimble和μ-blox所采集静态数据中的GPS和GLOANSS伪距噪声和载波相位噪声,不同颜色表示不同的卫星.从图2中可看出两种接收机所观测的GLONASS伪距噪声标准差均大于所观测的GPS伪距噪声标准差20 cm左右.Trimble接收机观测的GPS伪距噪声标准差为0.25 m,约小于μ-blox接收机观测的GPS伪距噪声的标准差0.07 m;Trimble接收机观测的GLONASS伪距噪声标准差为0.45 m,约小于μ-blox接收机观测的GLONASS伪距噪声的标准差0.09 m. 两种设备的正常伪距噪声稳定度相近,但μ-blox接收机观测的伪距存在较多的非正常噪声,本文认为这些非正常噪声是粗差,造成了μ-blox 接收机的伪距观测值标准差偏大. 图3示出了Trimble接收机所观测的GPS和GLONASS信号的载波相位噪声标准差均在0.0050 cycle左右,μ-blox接收机观测的标准差均在0.0194 cycle左右. 图3中还示出GPS与GLONASS信号的载波相位噪声标准差十分接近. 可见由于硬件性能上的差异,相较测量型接收机,低成本接收机μ-blox M8P所测量的伪距和载波相位均具有较大的测量噪声,其伪距测量存在较多粗差,载波相位噪声比测量型接收机的大一个量级.
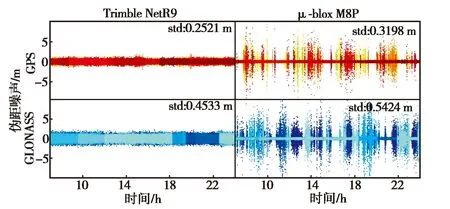
图2 Trimble和μ-blox所采集静态数据中GPS与GLONASS信号的伪距噪声

图3 Trimble和μ-blox所采集静态数据中GPS与GLONASS信号的载波相位噪声
2.1.2 伪距单点定位精度
为了评估低成本接收机伪距定位精度,首先进行的是伪距单点定位的处理.在伪距单点定位中,所使用的是戈达德航天中心(GSFC)发布的广播星历,电离层延迟使用Klobuchar模型进行改正,对流层延迟使用Saastamoinen经验模型进行改正,截止高度角设置为10°.
图4、5、6分别示出了Trimble NetR9和μ-blox M8P接收机单频GPS、GLONASS、GPS/GLONASS伪距单点定位的误差. 如图4所示,单频GPS伪距单点定位时,Trimble接收机E/N/U三个方向的定位误差均方根(RMS)值分别为0.59 m、0.94 m、1.38 m, μ-blox 接收机E/N/U三个方向的定位误差RMS分别为0.75 m、0.99 m、1.71 m. 单频GLONASS伪距单点定位时,如图5所示,Trimble接收机E/N/U三个方向的定位误差RMS分别为1.81 m、1.90 m、6.71 m,μ-blox 接收机E/N/U三个方向的定位误差RMS分别为3.02 m、3.27 m、8.30 m. 可见,与GPS相比,两种接收机的GLONASS伪距定位误差均较大,且存在定位异常. 而采用单频GPS/GLONASS组合伪距单点定位时,如图6所示,Trimble接收机E/N/U三个方向的定位误差RMS分别为0.65 m、0.94 m、1.33 m, μ-blox 接收机E/N/U三个方向的定位误差RMS分别为0.81 m、1.16 m、1.90 m. 其结果优于GLONASS结果,且与GPS结果趋近. 在静态模式下,低成本接收机GLONASS伪距单点定位的误差最大,GPS伪距单点定位的误差最小,GPS伪距单点定位水平精度优于1 m,垂直精度优于2 m.
在数据质量分析中,经分析得出了同等高度角下,GLONASS卫星载噪比小于GPS卫星载噪比,且GLONASS信号的伪距噪声大于GPS信号伪距噪声. 因此,这导致了静态GLONASS伪距单点定位的误差显著大于GPS/GLONASS结合和GPS单系统的结果. 同时,由于GLONASS广播星历精度没有GPS的高,导致了GPS/GLONASS结合时伪距单点定位的精度反而不如GPS单系统. 此外,μ-blox接收机测量的伪距噪声大于Trimble接收机测量的伪距噪声,且载噪比小于Trimble接收机的,这导致了μ-blox接收机的伪距单点定位结果差于Trimble接收机的伪距单点定位结果.
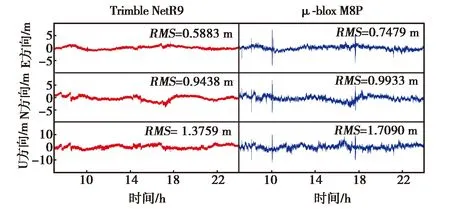
图4 Trimble 和 μ-blox 静态GPS伪距单点定位误差对比图
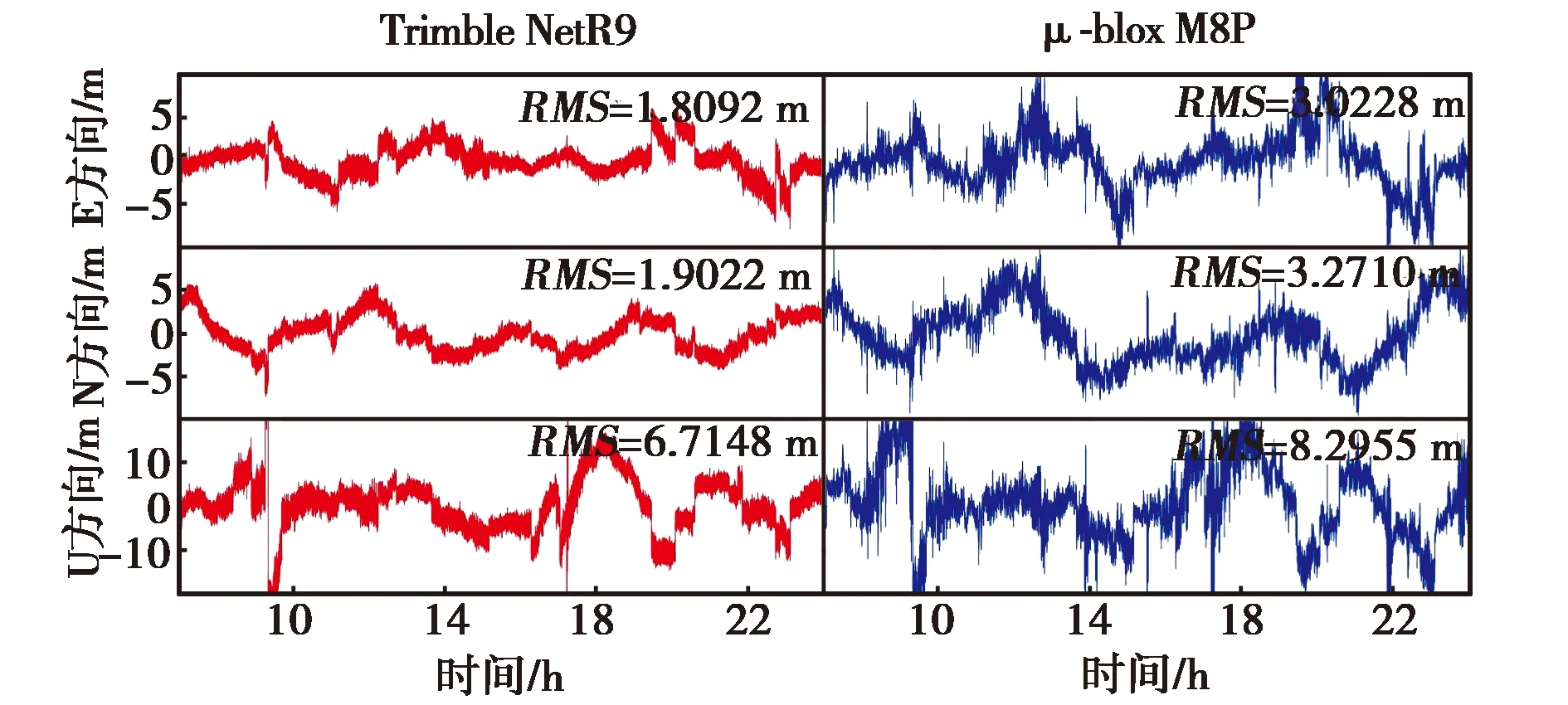
图5 Trimble 和 μ-blox 静态GLONASS伪距单点定位误差对比图
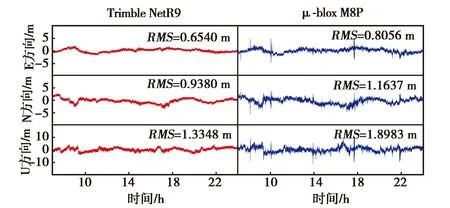
图6 Trimble 和 μ-blox 静态GPS/GLONASS结合伪距单点定位误差对比图
2.1.3 短基线相对定位精度
为了测试静态条件下低成本接收机相位观测值定位精度,本文对两种接收机数据进行了短基线相对定位的处理.基准站选取为距离实验地点约430 m的IGS观测站WUHN站,采用单频GPS/GLONASS双系统观测数据,采样率为1 Hz,截止高度角设为10°. 图7、8、9分别表示静态短基线相对定位模式下,μ-blox低成本接收机和Trimble高精度接收机GPS单系统相对定位、GLONASS单系统相对定位、GPS/GLONASS组合相对定位的结果. 如图7所示,μ-blox低成本接收机GPS单系统相对定位结果差于测量型接收机结果,其E/N/U三方向上RMS分别为0.34 cm、0.41 cm、1.11 cm,比Trimble的E/N/U三方向RMS分别大0.21 cm、 0.25 cm、0.48 cm. 如图8所示,μ-blox定位结果在三方向上RMS分别为7.26 cm、2.68 cm、2.48 cm,比Trimble的E/N/U三方向RMS分别大7.88 cm、2.76 cm、5.27 cm,而两种接收机GLONASS单系统相对定位结果误差都很大,且局部定位结果不稳定有较大起伏,这可能是在此时间段GLONASS可用卫星数较少造成的. 如图9所示,μ-blox低成本接收机GPS/GLONASS组合相对定位结果差于测量型接收机结果,其E/N/U三方向上RMS分别为0.29 cm、0.32 cm、0.93 mm,比Trimble的E/N/U三方向RMS分别大0.35 cm、0.47 cm、0.77 cm. 通过对比μ-blox低成本接收机三个系统的载波相对定位结果,可知在GPS观测卫星足够多时,与GLONASS组合的相对定位并没有改善定位结果,有时甚至更差,但GPS/GLONASS双系统组合对测量型接收机的相对定位结果有显著提升,此差异可能是由于两种接收机对GLONASS卫星观测的数据质量差异造成的.
相对定位结果受接收机的载波相位噪声的影响,在观测值的质量分析中,可得出μ-blox接收机的载波相位噪声大于Trimble接收机的一个数量级,且对于所有可用卫星整体而言,μ-blox低成本接收机所接收卫星信号的载噪比较小,因此导致了μ-blox低成本接收机的定位结果较差. 但在良好的观测环境下,基于μ-blox低成本接收机组合GPS/GLONASS相对定位,或GPS单系统相对定位仍可以提供亚厘米至厘米级的高精度定位服务.

图7 Trimble和μ-blox静态短基线GPS相对定位误差对比图

图8 Trimble和μ-blox静态短基线GLONASS相对定位误差对比图
2.2 动态车载实验测试分析
为了测试低成本接收机动态定位性能,本文设计了在城市环境下的动态车载实验.测试地点为武汉市高新技术开发区,数据采集时间为2018年6月27日上午10时至12时,所使用接收机采样率均为1 Hz. 测试路线如图10所示,实验中行车环绕此区域共5圈. 数据处理中分别采用GPS/GLONASS组合及单GPS载波相位相对定位解算,其中基准站为Trimble NetR9 接收机,安置在测区内(图10右下角). 实验中试验车车顶分别安置了一台Trimble NetR9接收机和一台μ-blox M8P接收机,两者之间的相对位置固定且测定. 本文将车顶Trimble NetR9接收机解算出的轨迹作为参考轨迹,将低成本接收机解算的轨迹与参考轨迹进行求差对比. 如图11中左侧的三条曲线所示,GPS/GLONASS组合相对定位E/N/U三方向上的定位误差RMS分别为 0.73 m、 1.38 m和0.82 m;如图11中右侧的三条曲线所示,GPS单系统相对定位E/N/U三方向上的定位误差RMS分别为1.18 m、1.59 m和0.99 m,这说明在信号受限的环境下,双系统相对定位提供了更稳定的结果. 由于城市环境下车道两侧多高大建筑物,对GNSS信号会产生很大的遮挡,并且低成本的μ-blox接收机所使用的贴片天线抗多路径差,而城市环境下多路径噪声严重,所以其在城市环境下动态实验结果的精度只有亚米级至米级. 这说明低成本接收机若想投入到自动驾驶等要求更高动态定位精度的领域使用,在接收机硬件及数据处理策略上还需做出改进.

图10 动态车载实验路线图

图11 低成本接收机μ-blox定位结果误差
3 结束语
本文对低成本单频多系统GNSS接收机μ-blox M8P进行了不同场景下定位精度的测试分析,通过与测量型接收机的定位结果对比,得出如下结论:
1)低成本接收机μ-blox M8P所测量GPS信号载噪比总体小于测量型接收机,所测量GLONASS信号载噪比总体与测量型接收机相近.
2)低成本接收机μ-blox M8P所测量的伪距和载波相位均具有较大的测量噪声,其伪距测量存在较多粗差,载波相位噪声比测量型接收机的大一个量级.
3)在静态模式下,低成本接收机GPS伪距单点定位水平精度优于1 m,垂直精度优于2 m,而采用短基线载波相位相对定位,可以实现厘米级的定位精度,具有很好的应用前景.
4)在车载动态模式下,低成本接收机能够提供亚米级到米级的定位精度.但是对于自动驾驶等需要分米级定位精度的应用,低成本接收机还需要做出改进.
5)在优越环境下,GPS/GLONASS双系统对低成本接收机定位性能提升不显著甚至变差,但在信号受限环境下,双系统能够提供更稳定的定位结果.
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
山东工业技术(2016年15期)2016-12-01 05:31:14
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
信息记录材料(2016年4期)2016-03-11 15:22:33