一种新型罗兰导航系统差分技术
2019-08-30 09:11:02丁长春陈佳怡刘睿
全球定位系统 2019年4期
丁长春,陈佳怡,刘睿
(1.中国电波传播研究所,山东 青岛266107;2.陆军边海防学院,新疆 乌鲁木齐 830002)
0 引 言
二次世界大战时期,出于军事需要,美国海军需要导航系统覆盖的范围比以往任意一个时期都要广,罗兰导航系统应运而生.原始罗兰系统又称为罗兰A(Loran-A),其工作频率为1.75~1.95 MHz,设计有效作用距离为1120~2240 km,定位精度为800~1600 m.在罗兰A的基础上,根据应用需求,经过多次技术迭代更新,至20世纪60年代,形成罗兰C(Loran-C)无线电导航系统[1].
美国海岸警卫队(USCG)和联邦航空管理局正在开展一项技术研究,即分析和确定一种新型罗兰系统作为GPS备份导航系统的可行性.根据USCG为罗兰C制定的功能要求,新型罗兰信号在港口附近及入港区域的可用性、准确性、完整性和连续性及发送格式必须满足一定的条件,才能应用于组合无线电导航系统.
USCG主持的罗兰C性能评估小组(LORAPP)正在牵头开展一项针对新型罗兰技术的研究和概念验证项目,用于测试该技术是否满足海上导航的需求.本文对新型罗兰C技术的导航能力进行了仿真测试.导航精度部分被认为是罗兰C系统在海洋环境中要克服的最大挑战.本文对罗兰系统如何通过类似差分全球定位系统(DGPS)的差分校正来校正信号的传播变化进行了探讨.
1 系统简介
新型罗兰技术是指在原有的罗兰脉冲组基础上再增加一个脉冲,该脉冲组可表达成32种状态信息,不同的状态信息传达不同的消息.该脉冲主要用于广播从多个陆基监测点获得的附加二次因子(ASF).ASF校正值由空间分量和时间分量组成.本文分析了该技术方案与原有的罗兰数据传输通道的关系,给出了系统测试的初步性能结果.
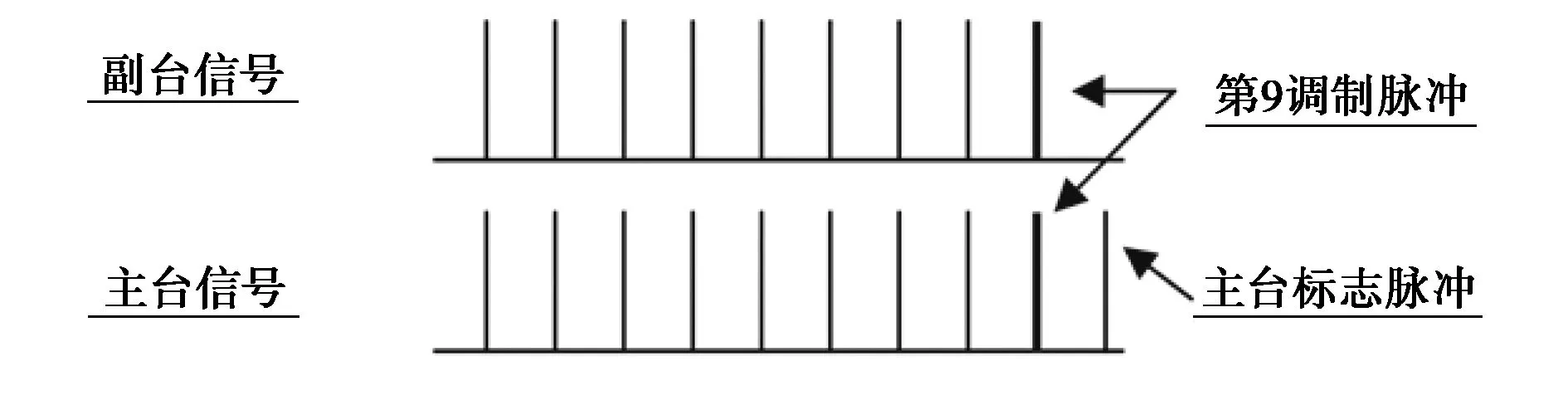
罗兰C完整性评估小组(LORIPP)和罗兰精度评估小组(LORAPP) 均确信只需对现有罗兰系统进行最小的变动,即可以满足导航性能完整性和准确性的要求.2001年夏[2],在阿拉斯加对采用瞬时测频(IFM)调制的方式增大数据速率的技术进行了演示,收效甚微.针对如何向用户传输增强数据,进行了讨论与研究,最终产生了一种新的罗兰数据传输技术.该技术是在标准的8个脉冲组后面增加一个第九调制脉冲.罗兰C评估小组认为需要将增加的脉冲组保持在现有的罗兰信号周期内,在实际使用的时候不能够增加现有用户系统的复杂性.在此需要说明的是,该项技术目前仍然处于技术论证阶段,尚未正式批复.
信号接收机接收台站编码信息和相应台站发送的时间导航信号等信息,这些信息可用于实现信号源识别,从而实现台链识别.在设备导航的过程中,只需要对所接收到的最优信号进行解析即可.
在实际使用的过程中,信号接收机需要精准的二次相位因子(ASF)修正数据,用于修正传播中信号的时延变化,更正已有的信息.时延偏移量由各个监测基站进行测量.接收机内存中自带一个基于与监控基站相关的ASF修正数据库.ASF在线校正系统仍处于概念验证阶段.
2 新型罗兰技术
2.1 新型调制技术
新型罗兰调制技术采用脉冲调制(PPM)方案,传递的信息量为5 bit/脉冲.该方案在现有的每个重复间隔脉冲组(GRI)后增加一个正相位脉冲,脉冲宽度为1000 μs.更改后的每个GRI主台站总共有10个脉冲,而副台站则有9个脉冲.
采用PPM的调制方式易于信号的发射与接收处理.发射机不需要对输出网络进行较大的更改,控制软件的复杂性大大降低,无需对当前的定时和频率控制设备以及发射机控制台进行重大修改即可实现.已有的接收机几乎无需更改.
需要通过次生相位变化来实现32个状态和传递5 bit/脉冲信息的功能.仅仅通过相位的变化只能够产生3 bit/脉冲,为了生成剩下的两位,需要改变信号包络的起始位置.本调制方案是将包络线移动三次,产生4种状态的包络线位置,每种包络线又包括8种状态相位,由此共同构成完整的32状态PPM.图1是32状态的时域图.相邻的两个包络状态之间的间隔为50.625 μs,如图2所示,以确保信号识别区上升期间无其余脉冲,每个包络内部各个状态之间相位相差1.25 μs.

图1 32状态PPM调制时域图
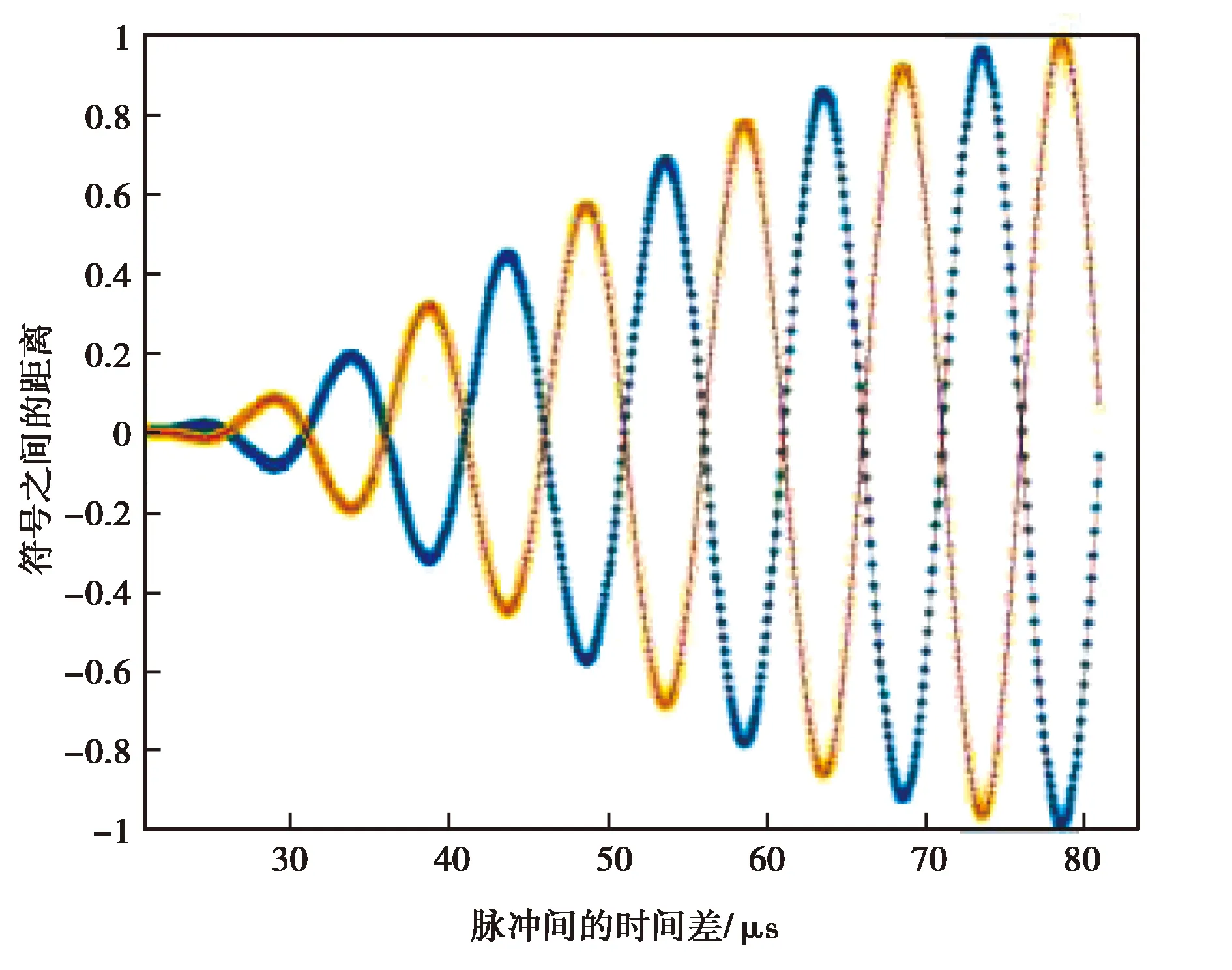
图2 包络脉冲内部子脉冲时延图
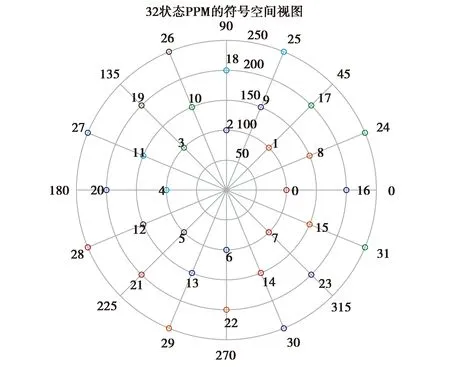
图3 新型调制方式空间视图
基于脉冲信号的相位信息,对脉冲信号的包络识别区分只需要45.625 μs.固态发射机调整第9脉冲的相位编码信息相对比调整之前8个脉冲的相位信息更为容易,因此第9个脉冲在主台站GRI B和副台站GRI A时采用正相位码,而在主台站GRI A和副台站GRI B时采用负相位码.此外,为保证主脉冲内部各个子脉冲之间时延(1.25 μs)的准确度,当前的系统发射主时钟频率应当为5 MHz.图3示出了32个符号的符号空间,表1示出了32个符号相对于符号0的时域位置.
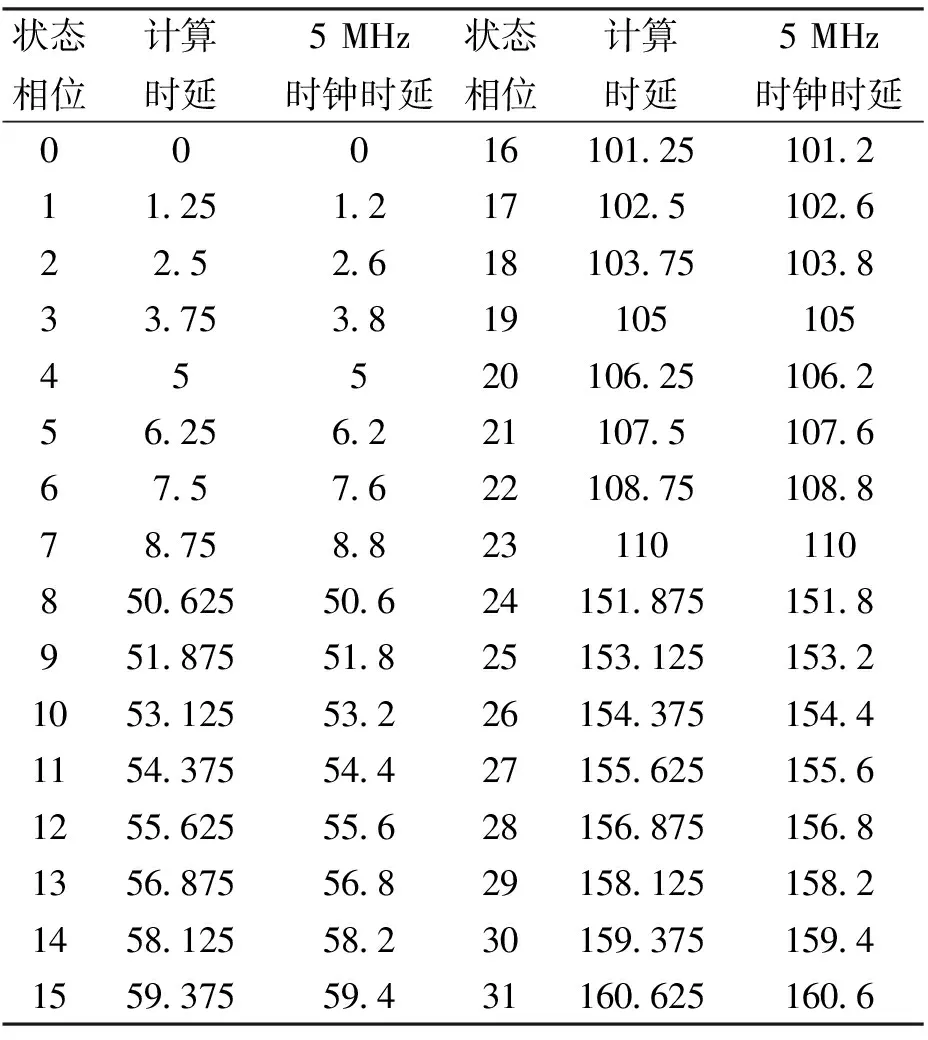
表1 各个符号位相对于0符号位的时间延迟表
2.2 增加的信息
为进行概念验证测试,在保证传递信息的有效性的同时,需将播发一次信息所用时长降到最低.在本方案中将有效信息长度限制在24个GRI之内.根据当前的美国罗兰数据传输速率,播发消息的最大长度为2.38 s.
对于不同的用户,第一次校正所需的时长会有所不同.差分(ASF校正)接收机需要对多个站进行校正,假设传输时间固定,接收机需要对每个罗兰台站都进行一次校正,而校正一个罗兰台站需要监测站提供2个校正数据.因此,对于一个罗兰C台链每个监测站将有6个校正信息,每个站点的校正数据将被分成3组 (每组数据包括2个校正信息).假设每个罗兰台站传输最多不超过15到25个监测站的信息(45到75组ASF校正数据),一个双向台站将有1~1.5 min的时间来进行首次校正.对于单向传输的台站所需时间翻倍.完整的告警信息或者ASF监测站“不可用”信息将根据需要传输,并具有最高优先级.
校正信息的最终格式和信息位分配尚未完成.在此先拟定了一种用于测试传输的ASF修正信息和绝对时间消息格式,如表2所示.
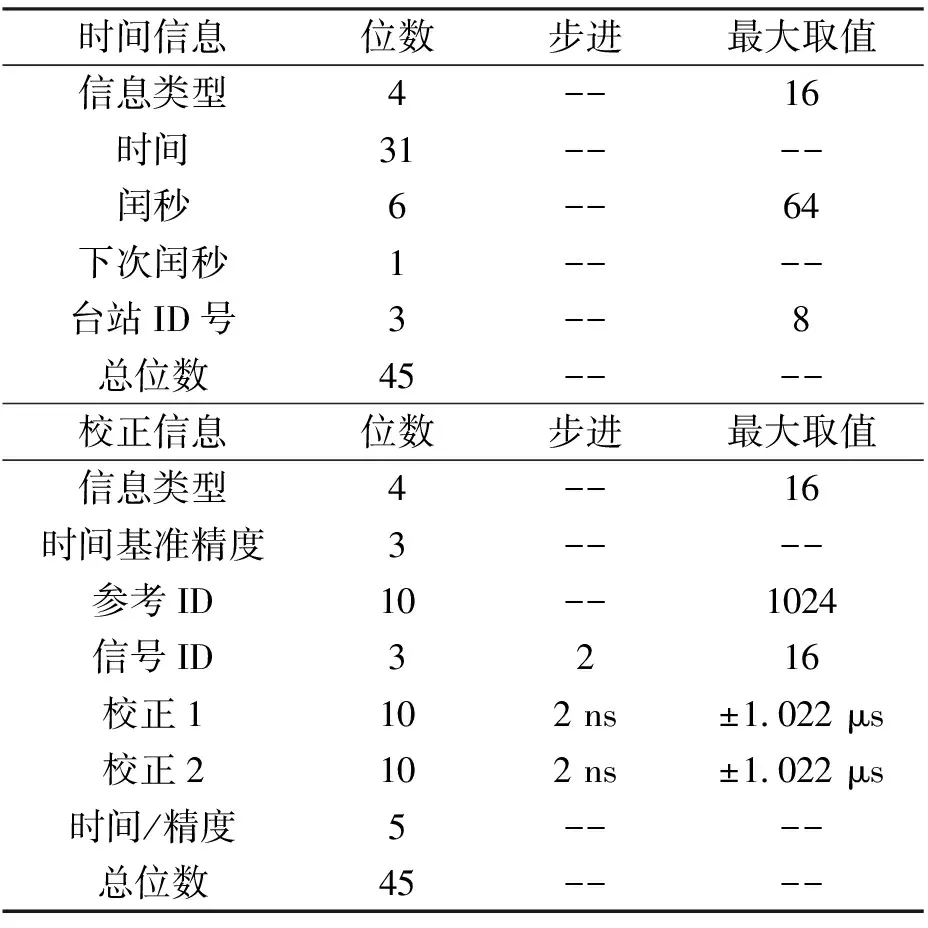
表2 信息格式表
罗兰C完整性评估小组(LORIPP)正在考虑对航空中的天波完整性建立预警机制,如果信号接收点地磁纬度超过规定的范围,信号强度低于阈值或传输路径大于一定距离,则警告用户不要使用该信号[3].
3 RS编码
3.1 RS编码技术简介
在新型罗兰调制应用中,编码起着三种作用:1)为信道数据传输提供纠错能力;2)提供解码后数据有效性的证明信息;3)提供信息同步字符.虽然可以以不同的方式实现以上功能,但在本调制方式中数据通道系统使用单一Reed-Solomon(RS)代码来完成以上三种功能.下面将进行详细描述.首先简要回顾一下RS编码.
RS编码是一种著名的前向纠错编码方法,它可以有效地保护数据不受未知和潜在的突发信道干扰[4].RS码是非二进制码,编码字母表中的符号q的数量,要么是质数,要么是质数的幂.在大多数应用中q是2的幂,即q=2b,所以每个符号对应b比特位.在新型罗兰系统中第9脉冲的调制采用b=5的方式,即q=25=32,每个码字符号取32个值中的一个(通常写成0,1,2,…,31).
RS码的编码和解码过程通常用有限域上的多项式来描述;该方法的细节不在本文的讨论范围.但是,我们可以提供一个示例.在新型罗兰系统中,9个脉冲共计45位消息字符串(为了方便查看,添加了逗号)01100,01001,01001,10101,10111,01101,10010,00110,00100转换为符号序列m=[12,9,9,21,23,13,18,6,4].在后面添加7个0,该消息可形成RS编码器期望的16个符号.根据RS编码算法计算出的15个奇偶性符号为p=[0,7,7,31,13,6,15,6,10,19,16,11,11,12,27].因此,完整的RS码字是串联 C31=[12,9,9,21,23,13,18,6,4,0,0,0,0,0,0,0,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27],缩写的RS(24,9)码字就是C24=[12,9,9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27].
注意到完整的RS码是循环的,换句话说,一个RS码字符号的循环移位(向左或向右)会产生另一个有效的RS码字.一般来说,缩写RS码不是循环的,但是它们可以接近循环.对于上面的具体例子,将C24向左旋转一个单位,产生另一个有效的RS码字[9,9,21,23, 13,18,6,4,0,0,0,0,0,0,0,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27,12].(可以看出这个例子是有效的,因为码字奇偶校验部分的第一个符号是零;通常,如果消息部分以0结束,或者奇偶校验部分以0开始,那么循环属性将用于缩短码字的某些移位).当数据传输的同步未知时,这种数据码与循环码的接近将会是一个问题,下面将进一步讨论这个问题.
RS码的译码算法称为有限距离译码,该译码算法不是将所有接收到的符号序列都转换为有效码字;只对接收到的符合固定间距要求的码字进行解码处理,不符合要求的不进行解析.图4示出了接收机的观测空间的一部分来描述这一概念.星号(每个圆一个)对应于实际的RS码字,接收到的点是所有其他可能的序列,接收的序列和圈子里附上这些集映射到封闭的码字.请注意,可解码集是不相交的,每个可解码集都包含一个码字.每个圆接收到的序列集合是对应码字在固定汉明距离内的序列.假设所传输的码字是黄色填充圆内的码字,解码器对该码字进行正确的解码,接收序列也在黄色圆内(这种情况发生的概率很高).如果接收到的序列在其他圆内(如橙色所示),解码器将释放与该圆对应的错误码字,从而产生错误.最后,如果接收到的序列不在任何圆内,即在灰色区域内,则解码器报告失败.
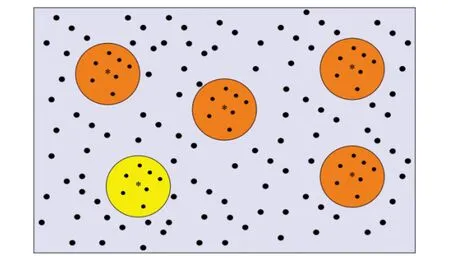
图4 解码器解码示意图
3.2 RS编码的纠错性能
在观测空间中,RS码的有效码字分布得越远,译码器在译码时可纠正的错误数也就越多.RS 码在中长码长的情况下,具有很好的纠错性能,复杂度相对较低,故在实际中得到了广泛应用.具体来说,RS码字之间的最小间距为n-k.在图4中解码器的表示中,每个码字的圆半径等于汉明距离下的 (n-k)/2.对于新型罗兰系统,n-k=15,因此代码可以纠正多达7个错误,通过将纠错个数控制在较小的量时(例如t=6),该算法可以提高系统的同步和完整性性能.未得到正确码字的总体概率(错误解码和解码失败的概率之和),相当于未落入黄圈的概率,可以计算为
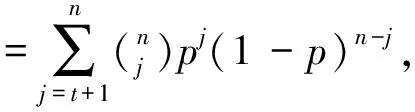
(1)
式中:p为信道的符号错误概率.对于新型罗兰代码(n=24和t=6).图5示出了总体概率与p的关系.注意到,只要符号错误率很低(小于1%的错误符号),那么产生的组合错误和译码失败概率就非常低.

图5 RS(24,9,6)编码性能
3.3 RS编码数据完整性
图5所示的性能曲线是错误解码概率(接收到的序列位于图4中的一个橙色圆圈中)与加上解码失败的概率之和(接收到的序列属于图4中的灰色区域).从完整性的角度来看,不正确的解码需要避免.为了证明新型罗兰RS码的完整性水平,我们采用以下两种方法评估解码错误的概率:基于随机接收的数据,并以特定的错误事件为条件进行计算说明.
随机接收数据:通常采用二进制CRC(循环冗余检查)码对系统进行误码率检测.此时需要构建系统模型,用于模拟系统故障或通道错误产生的影响.具体表现为当接收数据异常时,在计算时假设接收到的数据是随机的(这样所有的二进制序列出现的概率是相同的),同时假设未能被校正到的错误概率等于二进制模式的数量与通过CRC奇偶校验位模式的总数的比.对于包含k个信息位和r个奇偶校验位的CRC代码,这时
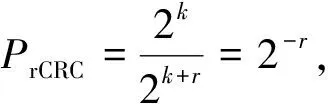
(2)
例如,r=24奇偶位的CRC码其性能完整性的概率为2-24.可以用随机数据对RS码进行类似的分析.不同之处在于,必须计算可解码序列的总数,即在有效码汉明码距离t内的可解码序列的总数,这些序列中包含未能校正的错误数据.最终得到的错误概率表达式如下:
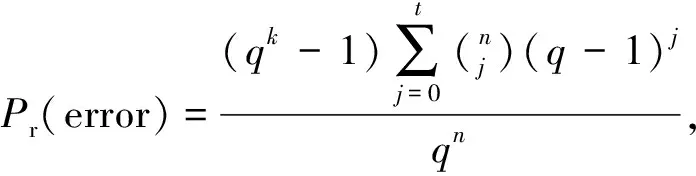
(3)
分子上表示有效但不正确的数据量,总数为(qk-1)乘以每个码字的可以校正的数据量;分母为接收序列的总数.对于新型罗兰代码,代入n=24,q=32,t=6得到Pr(error)=3.2×10-9.
特定错误事件:为了更好地评估系统错误检测能力,我们逐个检查错误事件的类,计算三种相关概率:接收到的码字是正确的(Pc),接收到的码字是未检测到的错误(PuE),以及存在解码器故障(PF).注意到这三个事件概率之和等于一.为了描述不同的工作情况,用u表示在某一特定事件中所接收到的错误数据量,0≤u≤n.由于RS (n,k)码的最小距离为dmin=n-k+1,且有界距离译码器可以校正t个误差(ts≤(n-k)/2),因此我们将问题的条件设为信道误差的个数u,并计算此数Pc(u)、PuE(u)和PF(u)条件下的相关概率.各个事件计算结果如下:
当0≤u≤t,可以得到Pc(u)=1,PuE(u)=0,PF(u)=0;
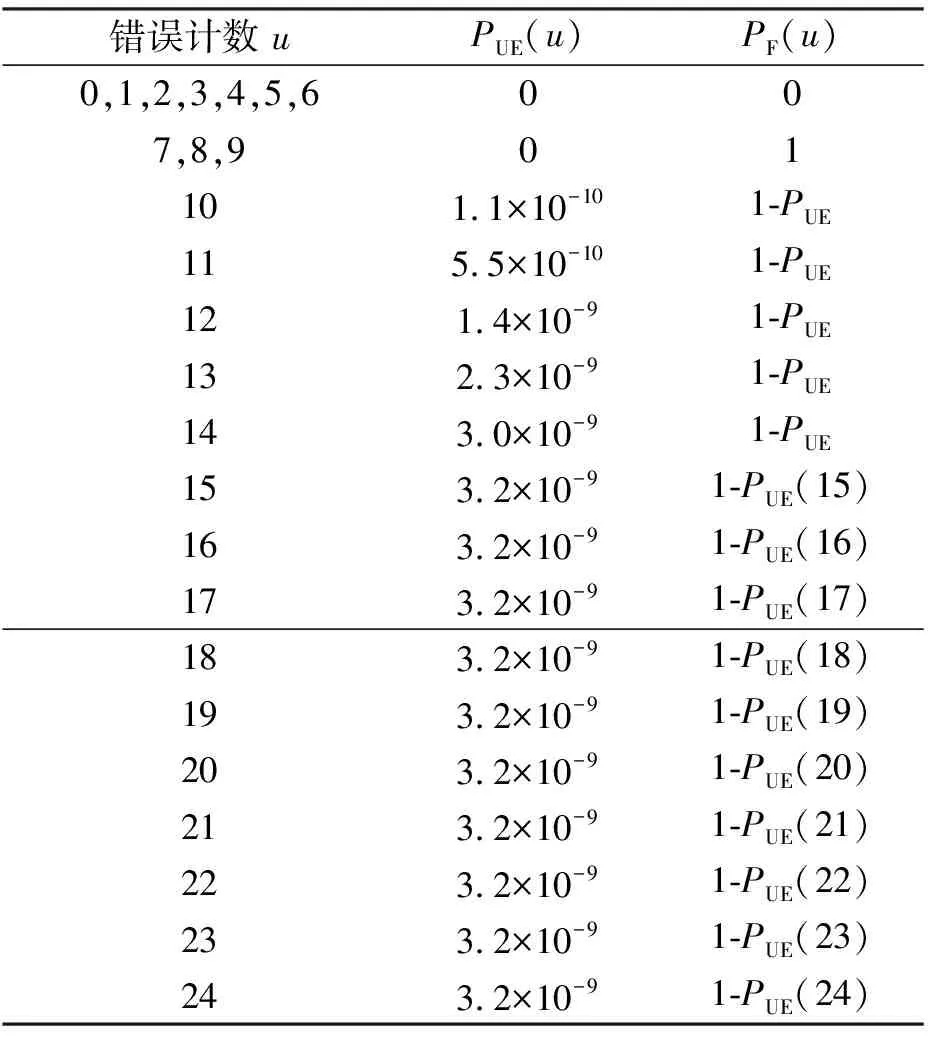
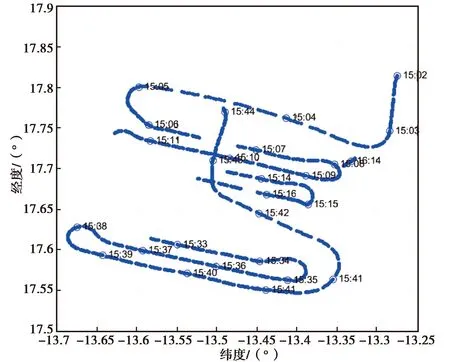
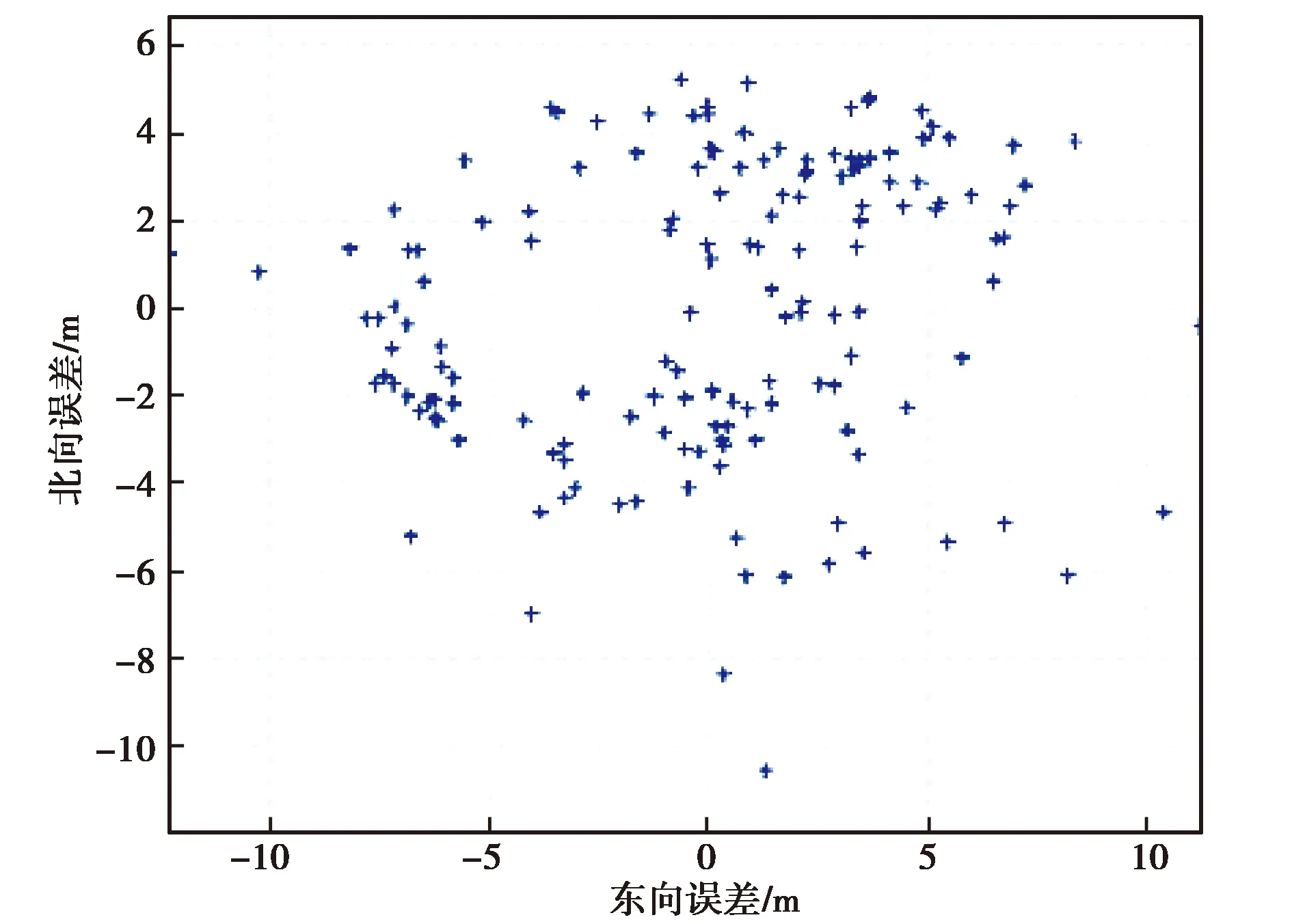
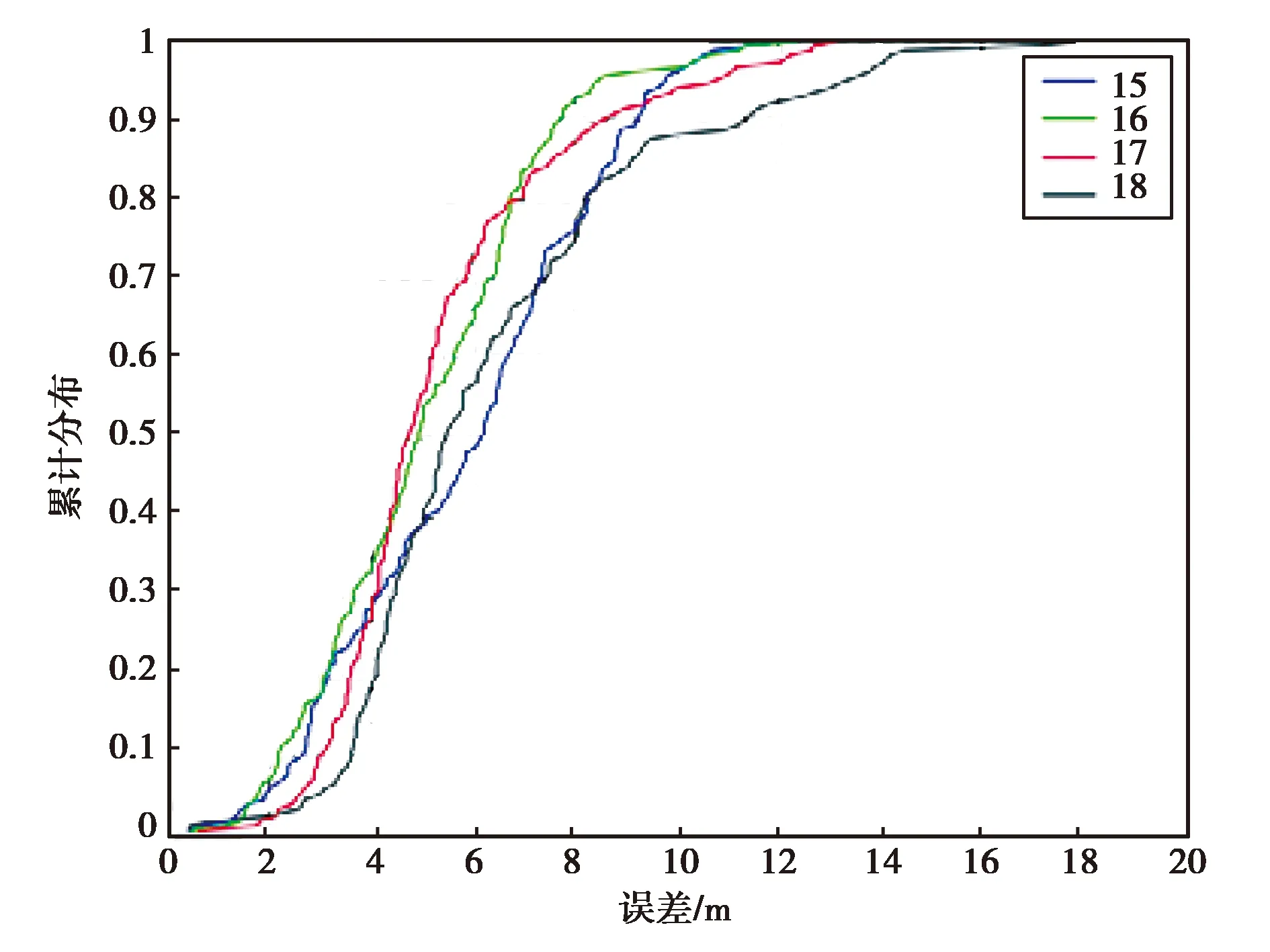
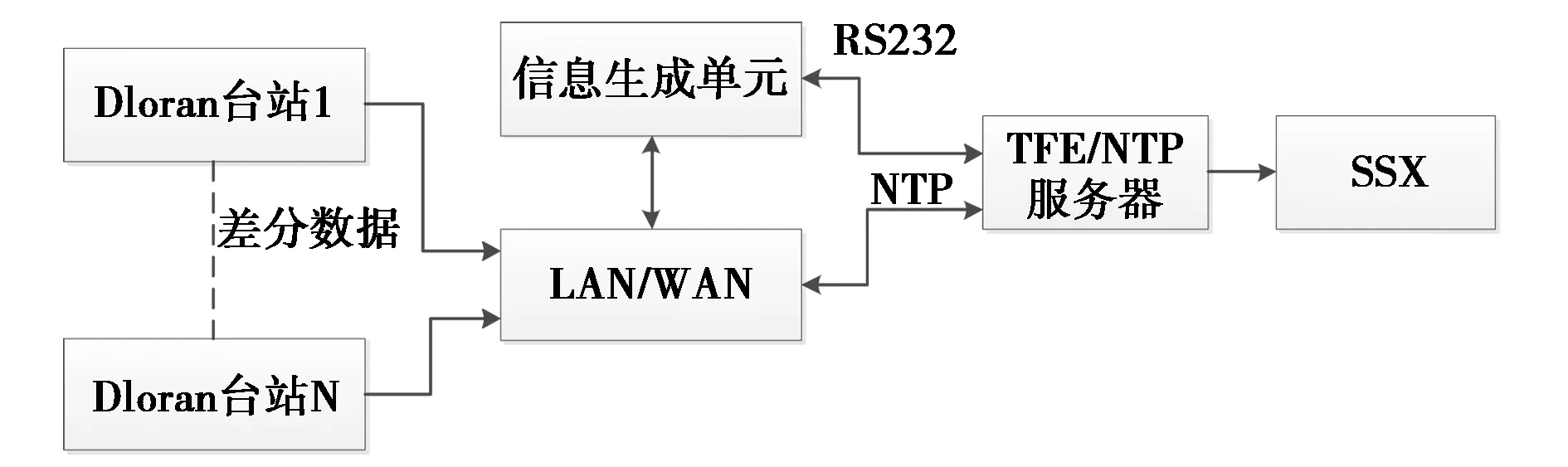
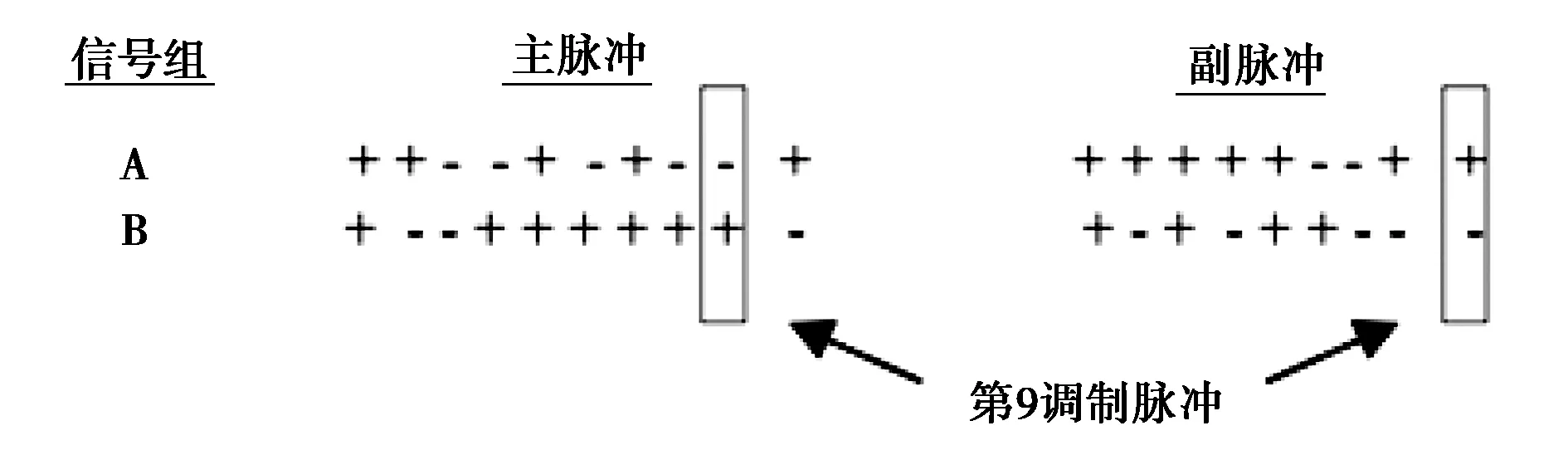
当t 当u>dmin-t,可以得到Pc(u)=0,计算PuE(u),可得到PF(u)=1-PuE(u). 对于PuE(u)的计算如果假设u个错误随机分布在n个符号位置上,那么错误概率就等于可解码的错误序列与序列的总数之比.采用Daraiseh方法得到的结果如图6和表3所示.总之,对于任意数量的信道错误,RS码的消息完整性级别都非常高. PUE(u)= (4) 图6 误差修正及错误概率图 错误计数 uPUE(u)PF(u)0,1,2,3,4,5,6007,8,901101.1×10-101-PUE115.5×10-101-PUE121.4×10-91-PUE132.3×10-91-PUE143.0×10-91-PUE153.2×10-91-PUE(15)163.2×10-91-PUE(16)173.2×10-91-PUE(17)183.2×10-91-PUE(18)193.2×10-91-PUE(19)203.2×10-91-PUE(20)213.2×10-91-PUE(21)223.2×10-91-PUE(22)233.2×10-91-PUE(23)243.2×10-91-PUE(24) 同步通信系统中的同步指的是发送器将经过编码的消息序列一个接一个地发送.接收方必须知道如何将接收到的符号解析为具体信息[4].这种情况如图7所示,其中示出了三组不同的包含有24个符号的传输码字和从接收方观察的符号流视图.为了能够同步接收端和发送端,我们为确定接收方对数据的解析是否正确,可以通过间歇传输固定的符号序列来实现(即所谓的同步).我们首选是使用RS代码本身的特性.如果我们将错误的数据解析模型用于解析RS随机序列,那么对上述随机数据的完整性分析表明,只有在低概率的情况下,错误解析的消息才可解码.换句话说,对于同步错误,RS解码器通常无法解码.因此,在错误解析的数据流中,多个符号全部可解码的概率要小得多,解码器可以调整其帧同步位置,直到多个消息可解码. 图7 同步后的发送与接收 由于RS编码在码长较短时具有近似循环的性质,使得随机数据模型与实际数据的拟合较弱.例如,上面在对RS码的描述中注意到,缩写码字的循环移位(向左移动一个单位)C24=[12,9,9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27]得到了一个完整有效的数据码[9,9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27,12].而循环移位与同步错误的不同之处在于符号没有循环.如果C24之后的消息以符号12开始,那么同步是有问题的,因为这两组接收端框架都使用了有效码字,解码器的纠错能力进一步增强了这种效果.例如,假设在示例码字C24传输过程中其最后跟任意符号S1和S2,信道输出是[12,9,9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27, S1, S2], 接收器在接收时增加一个偏移量,可得到24个符号如下[9,9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27,S1]并将其传递给解码器.在这种情况下,RS解码器将最后一个位置的单个错误更正为12,即将S1替换为12,并释放不正确的数据集.类似的,对于有两个符号偏移量的数据帧, 译码器对接收得到的数据帧[9,21,23,13,18,6,4,0,7,7,31,13,6,15,6,10,19,16,11,11,12,27,S1, S2]进行译码,在这种情况下,可以纠正3或4个错误,但是最终得到的结果仍然是错误的,这是由于符号没有同步,产生以上问题的主要原因是数据码的近似循环性质.为了上述问题,需要破坏缩短码字的循环特性.在通信文献中最初解决了通道的同步问题(即没有符号错误,只是同步问题).在这种情况下,如果代码的数据速率(k/n)小于1/2,解决方案是使用一个旁集代码,在这个代码中,通过向每个码字添加固定向量c来修改原始数据.(注意,c本身不能是有效码,只需将码字置换为信息符号赋值即可) 旁集代码使用与原始代码相同的解码方式,并且具有相同的纠正错误和完整性性能. 在此设计了一款电子管发射机(TFE)控制软件,其中包括PPM调制软件模块、RS编码模块、特定的消息格式打包模块,同时对固态发射机的控制软件进行修改,用于传输PPM调制参数.针对这两个发射机开发特定的数据接收机.其中第一种发射机的接收机只对ASF校正信息进行解调和解码;第二种发射机的接收机是差分罗兰接收机,它计算罗兰C的差分修正信息,并将校正信息输出. 针对该方案于2003年9月30日进行了系统整体性能的传输测试.图8示出了测试的结果. 图8 测试结果图 图8(a)示出了不同发射功率时,接收机接收到的信号的强度.图8(b)示出了接收到信号进行解码解调时错误信息数(包括RS解码时校正的错误),图8(c)示出了每10个消息块中丢失码元的百分比. 从图8可以看出,发射信号强度越强,接收到的信号电平越高.即使对于信号稍微弱一些的信号,信号出错的概率也远远低于RS解码器固定误码率,而且不存在信息丢失的情况.随着发射信号功率的降低,数据信息的误码率逐渐增大. 目前对新型差分罗兰传输准确性的评估尚处于早期阶段,仅有少量的试验数据用于测试验证.图9~11展示了一些试验数据.图9示出了测试时的运动路径.图10是一个散点图,显示了这一时期罗兰的准确性,所绘制的数据为DGPS和罗兰定位之间的差值.图11示出了DGPS和罗兰之间的时间延迟,延迟以较小的增量变化,并针对每个延迟值对定位精度进行评估. 图9 测试运动轨迹 图10 定位误差分布图 图11 定位精度与时延 目前常用的固态发射机只接受定时脉冲,因此需要修改控制软件产生对应的定时脉冲,并在定时脉冲中构建类似的罗兰调制脉冲.控制更改原理框图如图 12所示. 图12 测试用差分罗兰网络模型 对系统的更改升级需要从放置在整个区域的差分罗兰基站开始.在完成罗兰发射台的升级后,修正信息可以从多个基站广播.差分罗兰校正信息通过广域网从基站传送到传输站,再传送到信息生成软件.为便于软件开发,此软件在单独的计算机上运行,以简化代码的修改和运行不同的系统参数.计算机的系统时钟通过网络时间与TFE时钟同步,当一切准备就绪时,该软件将集成到TFE系统中.消息生成软件以正确的格式对信息进行编码,包括RS纠错代码.该软件将信息体现在5位信息符号中.在TFE通过RS-232端口请求数据之后,实际的PPM符号被传递到TFE进行传输.TFE将调制脉冲添加到罗兰脉冲发射机组中,每个发射台将传送单独的校正、时间和电台识别信息.因此,在双台站操作中将同时传输两个独立的消息.调制信号的相位需要与前一个脉冲的相位匹配,如图13所示. 图13 新型罗兰相位编码 图14 第9脉冲位置 图14示出了调制脉冲在标准罗兰组中的位置.在主台站和副台站脉冲中,脉冲“0”符号是在8个脉冲之后的1000 μs.调制后的脉冲可以根据符号在时间上移动,但它与第8脉冲的距离不会超过1000 μs.如果没有数据要传输,TFE不会传输额外的脉冲. 在2004年3月,该系统再一次进行测试.测试的主要目标是验证每个符号与基准符号之间时间间距的准确性.该方案能够以低速率、高速率或同时以这两种速率向模拟器传输所有消息类型的消息.一个原型罗兰接收机/解调器连接到天线模拟器的输出,所有消息都被解调,没有错误. 本文在现有罗兰系统的基础上给出了产生、编码和解码、调制和解调以及使用差分罗兰ASF校正的方法.针对该方法进行了实际测试试验,并对试验结果进行了分析,数据分析结果表明采用该方法可以在不进行差分站布设的情况下完成差分定位.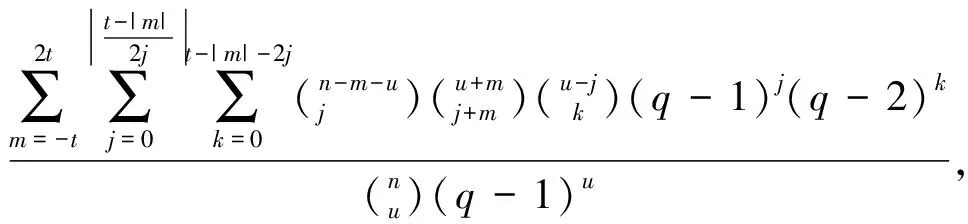

4 数据同步

5 数据传输测试

6 系统测试
6.1 测试试验
6.2 固态发射机调制
6.3 差分罗兰调制测试结果
7 结束语
猜你喜欢
绿色包装(2022年11期)2023-01-09 11:23:28
中国石油石化(2022年12期)2022-07-16 08:28:28
文苑(2020年10期)2020-11-07 03:15:40
中国外汇(2019年19期)2019-11-26 00:57:32
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
扬子江诗刊(2018年1期)2018-11-13 12:23:04
舰船电子对抗(2018年3期)2018-08-28 02:02:56
扬子江(2018年1期)2018-01-26 02:04:06
法国研究(2016年3期)2016-05-17 03:56:41