引信MEMS延期解除保险机构
2019-08-28 06:40:08席占稳聂伟荣
探测与控制学报 2019年3期
郑 灿,席占稳,聂伟荣,徐 娜,童 旭
(南京理工大学机械工程学院,江苏 南京 210094)
0 引言
引信延期解除保险机构(简称延解机构)在发射后安全距离内应保证引信中被保险零件处于被控制的保险状态,当弹丸飞到安全距离以外后,释放被保险零件,使其由保险状态变为待发状态。延期保险机构可保证引信炮口安全距离,避免意外发火伤及我方人员及装备。
传统引信有以下途径实现延解功能:火药延期、易熔合金、钟表结构、准流体延期解除保险、气阻机构、球转子、保险带、传感器机电延解机构等,存在结构尺寸大、保险距离短和延时时间散布大等问题。
由于MEMS技术的加工特点,引信MEMS安全保险机构为平面结构,因此许多传统引信延解机构的形态不再适用于MEMS延解机构,如火药延解机构、球转子延解机构、保险带延解机构等,即使有些机构的工作原理在MEMS机构中可以继续应用,其结构也需要进行改进,以满足加工工艺的要求[1-3]。
例如钟表延解机构在引信安全系统中的应用,如图1所示。该钟表机构用于旋转弹,利用离心力驱动钟表机构工作。同传统引信用钟表机构相比,这种MEMS钟表机构结构形式摒弃了传统钟表机构中原动机、中间轮、过渡轮,而采用三对卡摆和擒纵轮的互相约束来实现远解的目的,从而避免了双层齿轮加工的问题,充分体现了MEMS结构“平面化”的特点[4-5],但同样存在结构复杂,且延时时间不易控制等问题。
图1 MEMS钟表延解机构Fig.1 MEMS Clock delay mechanism
通常引信MEMS机构体积小,发火机构不适合采用靠机械动能发火的结构,而是采用依靠电能发火,即电火工品。因此,通常在采用MEMS机构时,引信都带有电源,这就为采用机电式MEMS延解机构提供了有利条件。机电式引信MEMS延解机构在产品的研制中已得到应用,例如美国的理想单兵武器(OICW)系统20 mm高爆榴弹定距空炸引信,采用地磁传感器检测弹丸的转数,转过预定的转数后给出解除保险信号,使作动器工作,解除对滑块的保险[6-8]。本文针对传统引信延期解除保险机构结构尺寸大、保险距离短和延时时间散布大等问题,提出了引信MEMS延期解除保险机构。
1 MEMS安全系统工作原理
本文中提出的一种垂直于弹轴放置的MEMS安全系统整体结构如图2,该系统包括:安全保险机构模块、电路控制模块、输出药板模块,通过后坐保险、离心保险及指令锁保险实现引信安全保险及解除保险功能。设计的MEMS安全系统主要应用于中大口径榴弹等弹种之上。

图2 MEMS安全系统Fig.2 MEMS safety system
安全保险机构模块是MEMS安全系统最关键的部分。如图3所示,安全保险机构主要由基板框架、悬臂卡锁式后坐保险机构、离心保险机构、隔爆滑块、指令锁延解保险机构等组成。
图3 MEMS安全保险机构Fig.3 MEMS safety mechanism
其工作原理为:正常状态下,隔爆滑块被后坐保险机构和离心保险机构卡住,该系统处于安全状态;发射后,悬臂卡锁式后坐保险机构感受后坐环境力向下运动脱离隔爆滑块,解除对隔爆滑块的第一道保险;隔爆滑块在离心力的作用下向右运动解除对离心保险机构的锁定,之后在离心力的作用下离心卡锁带动离心弹性梁向外侧运动,解除对隔爆滑块的第二道保险。同时,指令锁保险机构的柔性锁臂抵在基板上,使得隔爆滑块无法在离心力作用下继续向右运动,传爆序列处于未对正状态;当弹丸飞行至炮口安全距离之外,通过弹道实时信息控制电推销器发火,推动指令锁柔性锁臂,解除对隔爆滑块的延期保险,隔爆滑块在离心力的作用下运动到位并锁定,此时该系统处于解除保险状态,传爆序列对正,引信处于待发状态[9-10]。
采用UV-LIGA技术,并分立式加工,然后再装配,可提高样机成品率,同时也方便对各个保险机构单独进行相应实验,为整个MEMS安全系统的性能指标提供前期依据。
2 指令锁保险机构设计
2.1 指令锁结构设计
对指令锁结构受力情况进行分析:首先,在后坐保险机构和离心保险机构解除保险之后,滑块在离心力作用下运动至指令锁臂与基板接触,指令锁臂需在运动作用撞击下,不能有明显的变形,保证指令锁结构功能性完好;其次,指令锁结构配合电推销器,指令锁臂需在销子作用下,保证被推入活动腔内,可靠解除保险,且不能影响滑块后续运动。
指令锁保险机构的动作过程如图4所示。其中如图4(e)所示,对指令锁保险机构局部各结构进行了简要说明。从图4(a)到图4(b),在离心力作用下,隔爆滑块运动到指令锁臂与梯形凸台接触而被限制,保险机构处于保险状态,同时梯形凸台又对电推销器进行限位。如图4(c)所示,柔性指令锁臂在电推销器销子的冲击作用下进入活动腔内,同时底座的结构对电推销器的销子运动行程进行限位。如图4(d)所示隔爆滑块在离心作用下继续运动至可靠闭锁,至此指令锁延期保险机构作用过程完成。
图4 指令锁机构运动过程Fig.4 Movement process of instruction locking mechanism
指令锁保险机构的柔性锁臂是一种悬臂梁机构,该柔性锁臂与隔爆滑块的运动方向存在一定的角度,既要保证柔性锁臂与基板运动撞击时和抵住基板时在离心力的作用下不能发生大变形,又要在电推销器作用下柔性锁臂被完全推入柔性锁臂活动腔,可靠解除锁臂对隔爆滑块的约束。初步设计时,柔性锁臂的尺寸如表1所示。

表1 柔性锁臂尺寸
2.2 电推销器选型和推力模拟
为了MEMS安全系统的设计更小型化,在保证柔性锁臂正常解除保险的前提下尽量选用规格较小的电推销器,初步选用直径为3 mm、长度为8 mm的圆形电推销器,通过底座固定在底板上,推销器的作用时间在ms级别,作用力与推销器内部装药量有关,可以达到N级别。
在已给密闭容积V0和输出峰值压力Pm下,对于真实爆炸气体,可用阿贝尔余容状态方程表示为:
(1)
式(1)中,Δ为装填密度,即Δ=W/V0;V0为密闭容积;W为药量;α为余容;Pm为输出压力;M为气体摩尔质量;R0为普适气体常数;T为爆温。
令火药力(或炸药力)f为:
(2)
则诺贝尔-阿贝尔方程为:
(3)
在密闭容腔内,火药燃烧或爆炸后的气体密度ρ等于装填密度Δ。火药气体余容α为:
α=e-0.4ρ=e-0.4Δ
(4)
推销器火药采用斯蒂芬酸铅,其火药力f为0.43[11],但由于推销器点火作用于销子过程中,并不能完全保证密闭理想状态,且微型推销器的装药量,爆轰体积等影响因素较多,导致实际与理论计算误差较大,所以在一定装药量下,实际推力远小于理论值。
装药15%硝化棉含量的斯蒂芬酸铅混合药剂,平均装药量8.8 mg情况下实验,并采用高速摄影的测试方法测试作用时间,进而求出推销的运动速度。测量数据如表2所示。根据v=s/t,推算出速度,瞬时速度-距离曲线如图6所示[12]。
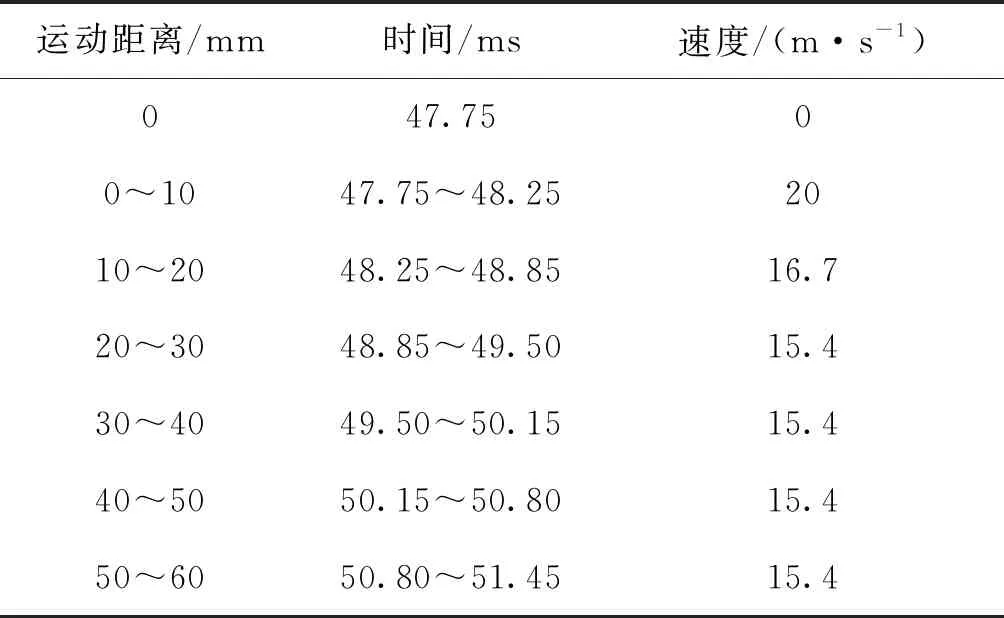
表2 销子运动瞬间速度
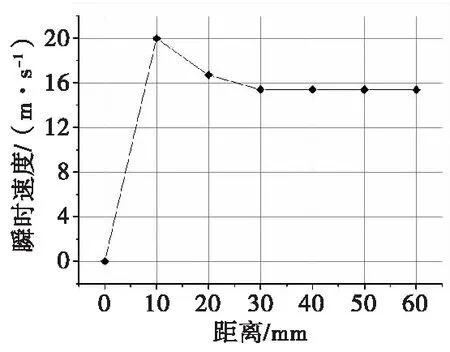
图5 瞬时速度-距离曲线Fig.5 The curves of instant actuation speed vs distance
根据上述实验结果,可知运动距离在10 mm时,运动时间为0.5 ms,瞬时速度为20 m·s-1,由于运动时间较短,可视为此过程为恒加速度运动,加速度为4×104m·s-2。
本文设计的指令锁保险机构,结构中销子运动位移为0.65 mm,远小于10 mm,因此可视其受到的加速度为4×104m·s-2。同时,根据电推销器初步设计,销子质量为1.62×10-4kg。以此推算销子所受推力为6.48 N。
综上所述,在8 mg装药量的情况下,通过实验得电推销器推力,并应用于本文设计指令锁机构中,视其推力完全可达到N级,具体数值在6.5 N左右。
3 仿真分析
有限元仿真分析是处理动力学问题的有效方法,本文使用ABAQUS建立指令锁保险机构结构模型,并进行动力学功能仿真分析。考虑到高韧性的要求,柔性锁臂将利用微电铸工艺用镍材料制作,由于其机械性能与电铸过程中的电流密度、电铸时间、电铸面积、加工高度等因素有密切关系,加工过程不同,材料参数会有一定的差异,其屈服强度处于0.5~1.1 GPa[13-14],为便于分析,电铸镍材料的参考参数如表3。

表3 电铸镍材料参数
3.1 安全保险状态仿真
根据MEMS安全系统的工作原理,后坐保险机构和离心保险机构解锁后,隔爆滑块在离心力作用下继续运动,至指令锁柔性锁臂与基板碰撞,并最终抵在基板,保证指令锁保险机构的安全状态可靠性。
因此,在电推销器作用之前,柔性锁臂要确保与基板碰撞和之后抵住基板两个动作的可靠性。对柔性锁臂进行动力学仿真,简化结构模型如图6所示。
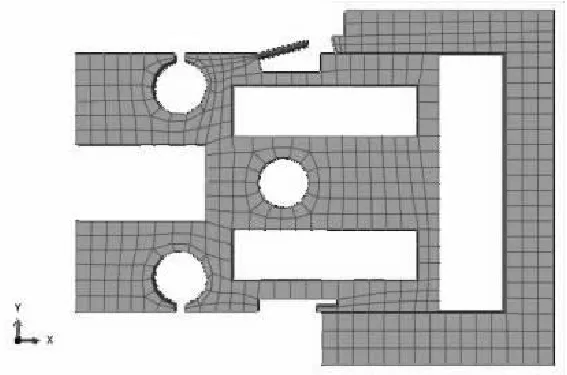
图6 简化后结构模型Fig.6 Simulation structure model
首先,对该模型施加不同的离心转速,使滑块在离心加速度作用下加速运动1 mm,至柔性锁臂最右侧与基板碰撞,仿真得到其变形量及应力,仿真结果如图7所示。
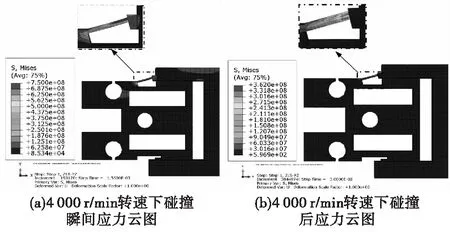
图7 柔性锁臂4 000 r/min转速下碰撞云图Fig.7 Collision cloud map at 4 000 r/min speed of flexible lock arm
从图7(a)可以看出柔性锁臂在碰撞瞬间,部分节点达到电铸镍的屈服极限750 MPa,使柔性锁臂发生塑性形变,但变形量为2.44×10-2mm,远小于指令锁解锁位移0.52 mm。同时图7(b)表明,隔爆滑块在几次碰撞后会稳定抵住右侧基板,稳定后结构最大应力为272 MPa,小于电铸镍的屈服极限,能保证其保险的作用。
由于装药量不同,到达出炮口的最大转速也不尽相同,初步设计弹丸在出炮口转速可达到7 000~8 000 r/min,为了验证该指令锁保险机构使用范围,选取不同的出炮口转速(4 000 r/min,6 000 r/min,8 000 r/min,10 000 r/min)进行仿真,得到其最大变形量和碰撞稳定后应力,10 000 r/min转速下,柔性锁臂碰撞稳定后的应力云图如图8所示,所有仿真结果汇总如表4所示。
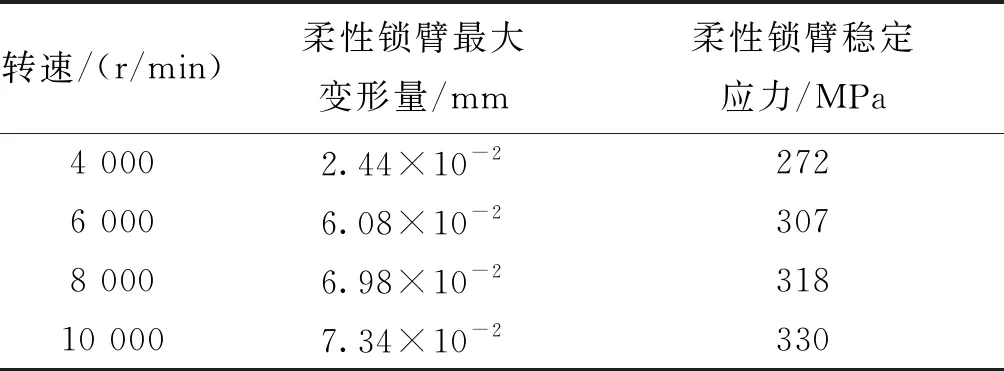
表4 柔性锁臂最大变形量和稳定应力
随着转速增加,隔爆滑块所受离心加速度增大,与基板碰撞过程中,柔性锁臂所受应力和右端最大变形量增加。如表4所示,转速在10 000 r/min以内时,柔性锁臂均能够保证在碰撞过程中不发生大的塑形变形;碰撞之后在离心力作用下抵住基板,柔性锁臂此状态下最大应力均小于电铸镍的屈服极限;因此,在设计指标7 000~8 000 r/min转速下,该柔性锁臂结构能够保证电推销器作用之前的指令锁保险功能。
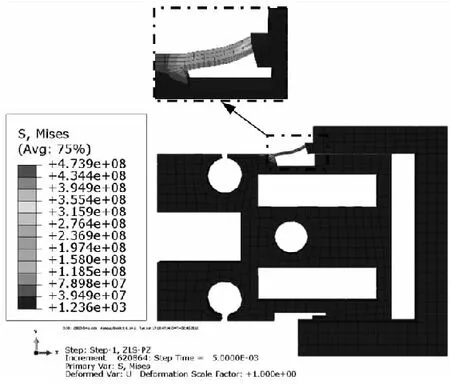
图8 10 000 r/min转速下碰撞后应力云图Fig.8 Stress cloud after collision at 10 000 r/min speed
3.2 解除安全保险状态仿真
为保证指令锁设计结构可在控制装药量的范围内,可靠解除MEMS安全保险系统最后一道保险,通过有限元仿真模拟推销器的作用过程,得出柔性锁臂能够被推入柔性锁臂活动腔所需力的范围,进一步为推销器的设计和装药量提供参考依据。对柔性锁臂进行动力学仿真,简化模型如图9所示。
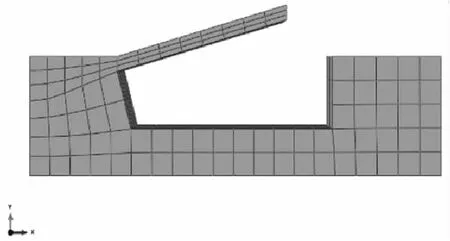
图9 简化后结构模型Fig.9 Simulation structure model
根据之前电推销器的设计和推力推导,推销器的作用时间在ms级别,作用力可以达到N级别。柔性锁臂能够被推入活动腔,解除对隔爆滑块最后一道约束的竖直位移为0.52 mm,对柔性锁臂上端面最右边施加大小为1 N、时间为1 ms的力载荷,进行总时间为5 ms的瞬态动力学仿真分析,该仿真过程采用国际单位,即kg-m-s-Pa,仿真结果如图10所示。
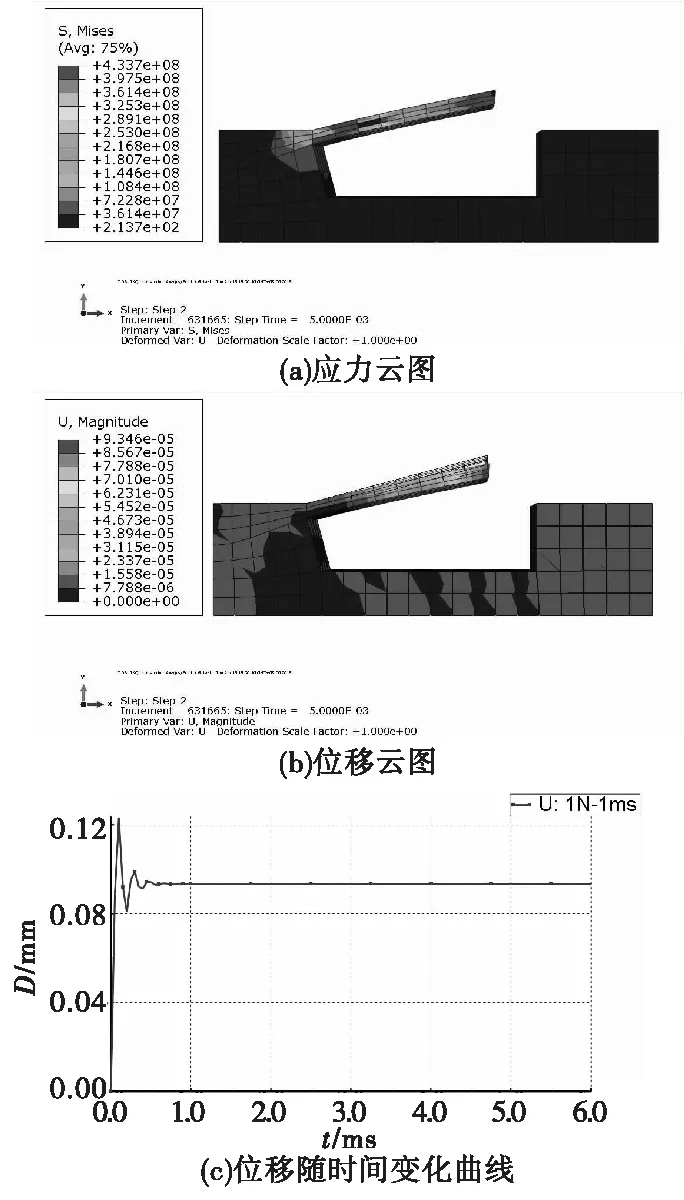
图10 柔性锁臂在1 N,1 ms作用下仿真结果图Fig.10 Simulation results of a flexible lock arm under the action of 1 N,1 ms
从图10可以看出,在1 N,1 ms的载荷下,柔性锁臂发生变形量为0.09 mm的塑形形变,未能被推入活动腔内,无法解除对隔爆滑块最后一道安全保险。同时从图10中可以看出,销子作用下柔性锁臂运动时间在0.5 ms以内,与推销力实验中高速摄影下销子运动距离10 mm、运动时间0.5 ms相符合。
为了分析柔性锁臂完全被推入活动腔所需力的范围,对柔性锁臂施加不同载荷(2 N,3 N,4 N)进行仿真分析,并汇总结果如图11所示(图11(c)中,3 N和4 N载荷状态下,柔性锁臂完全推入活动腔,位移响应曲线重合)。
由图11可知,当作用时间相同时,作用载荷越大,柔性锁臂的位移也越大。在模拟作用载荷大于2 N时,柔性锁臂均在0.5 ms内发生塑性变形,且位移均超过解除保险位移0.52 mm并进入活动腔内,可靠解除对隔爆滑块的最后一道约束。
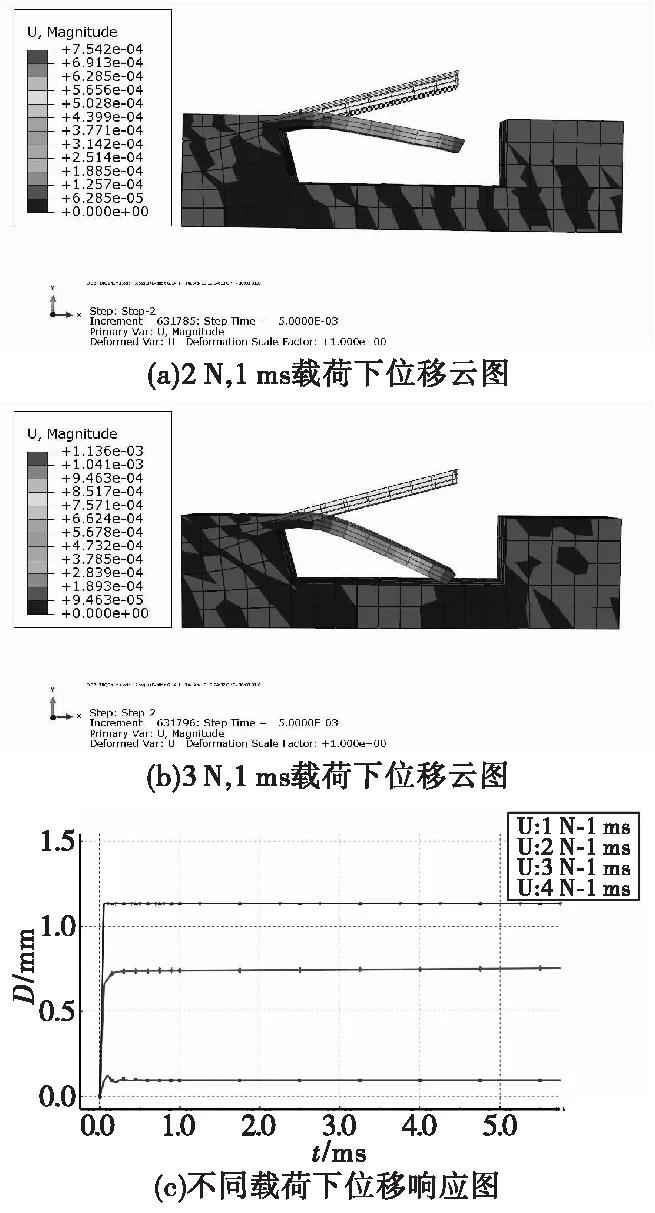
图11 柔性锁臂在不同载荷下仿真图Fig.11 Simulation diagram of flexible lock arm under different loads
4 样机试验
安全保险机构采用多层UV-LIGA工艺、镍材料加工制作,原理样机实物图如图12所示。通过有限元仿真和试验相结合的方法,对样机进行试验分析,验证该设计的可行性和功能性。指令锁延解机构的测试主要分为两个方面:第一,在离心环境下,当前两道保险解除后,隔爆滑块运动一段位移使柔性锁臂与基板发生碰撞,然后稳定抵在基板上,测试柔性锁臂在碰撞过程中以及后续离心转速下的安全可靠性,并分析其适用范围。第二,指令锁延解机构的整体测试,即电推销器与柔性锁臂及活动腔的配合试验,测试柔性锁臂在设计选定的电推销器作用下是否可以可靠解除保险,完成解除保险功能。
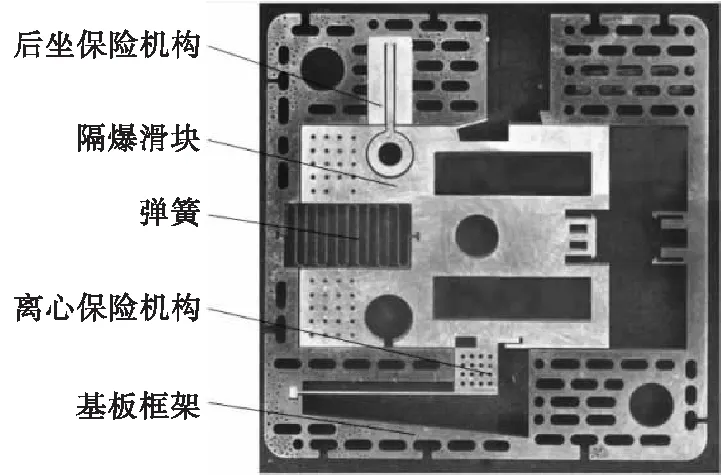
图12 MEMS安全保险机构样机图Fig.12 Prototype of safety insurance mechanism for MEMS
4.1 离心环境试验
离心试验平台以离心转台为主体搭建,如图13所示。原理样机固定夹具中,并通过螺钉安装在离心转台的转盘上,安装时需将隔爆滑块的运动方向中心线与离心转盘的半径方向保持一致,4组样机为同一批次加工制作。由于实际测试中,隔爆滑块质心与转轴的距离和设计值不同,将设计转速值7 000~8 000 r/min通过等效离心加速度进行换算,用以离心平台加载转速。
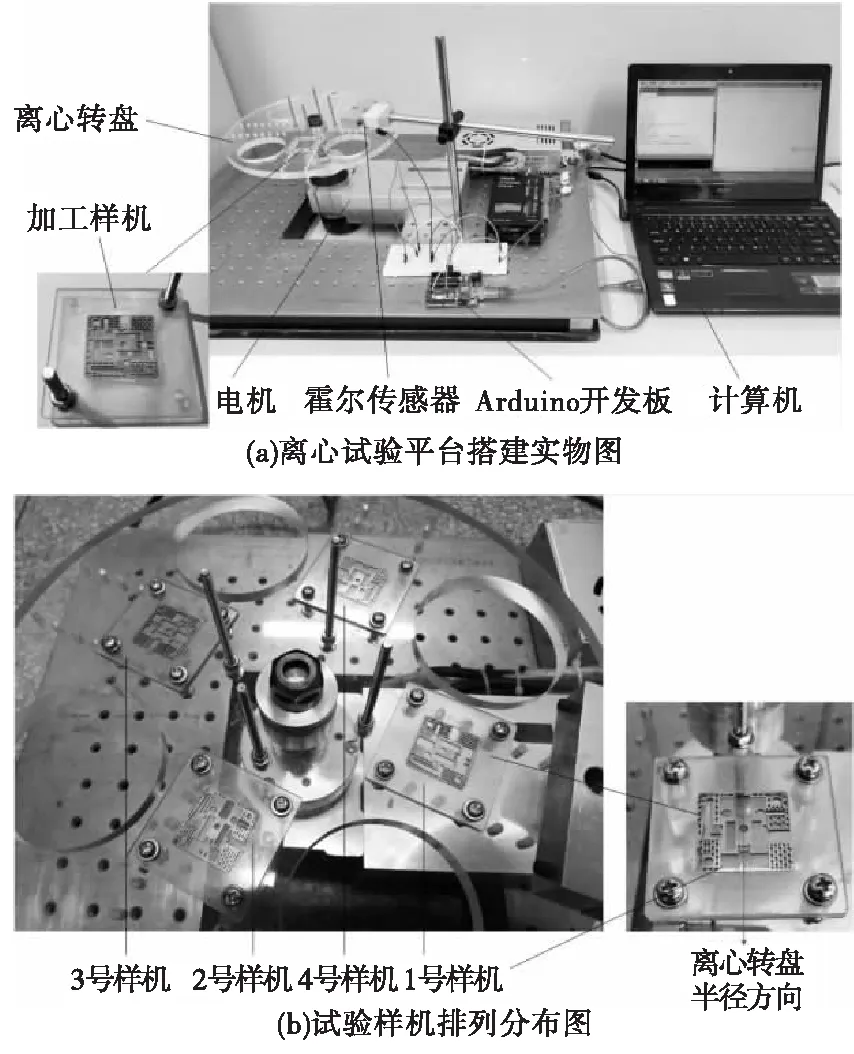
图13 离心试验装置图Fig.13 Centrifugal test equipment
试验结果表明:柔性锁臂在测试环境3 500 r/min,等效于理论转速10 500 r/min左右情况下,柔性锁臂在碰撞中未发生塑性变形,而后稳定抵住基板,可靠实现安全保险功能。
4.2 电推销器配合试验
选用微小型电推销器,其推力通过测试结果推导可以达到8 N以上,在验证了电推销器的适用性后,与原理样机进行配合试验,隔爆滑块和电推销器同时装配在钢材料底座结构中,并且加上盖板,试验涉及火工品,由专门单位人员操作完成。试验装置及结果如图14所示。
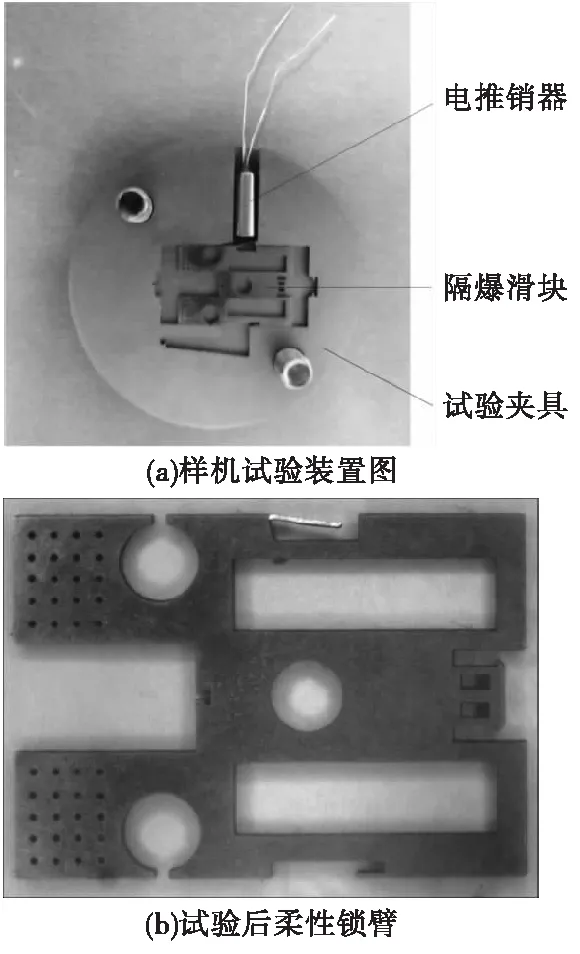
图14 电推销器配合试验Fig.14 Electric actuator test
如图14(b)所示,柔性锁臂发生塑性形变进入活动腔内。试验结果表明:电推销器发火后,销子在火药力驱动下在μs级时间内撞击指令锁柔性锁臂,使其发生塑性形变进入活动腔内,同时电推销器的销子会被底座挡住,不再继续运动与隔爆滑块发生接触,隔爆滑块可以顺利进行后续运动,验证了结构设计,该指令锁延解机构满足可靠解除保险功能。
5 结论
本文设计了用于MEMS安全保险系统的机电式指令锁保险机构,并根据MEMS安全保险系统的作用原理,从安全保险状态和解除安全保险状态两方面,对指令锁柔性锁臂进行了不同状态下的瞬态动力学仿真分析。基于多层UV-LIGA工艺、镍材料制作原理样机,并对指令锁延解机构样机进行了离心环境试验和电推销器配合试验。仿真和试验结果表明。在电推销器作用之前,柔性锁臂在转速10 000 r/min以内时,可靠保证MEMS安全系统处在未解除保险状态。在电推销器根据弹道实时信息正常工作情况下,推力大于2 N时,柔性锁臂完全被推入活动腔,快速可靠解除MEMS安全系统的延期约束。因此,在此设计MEMS安全保险系统中,此指令锁延解保险机构,可根据弹道实时信息通过电推销器驱动柔性锁臂的方法实现引信延期解除保险的功能,可以保证炮口安全距离,并且可以通过电路设计不同延时时间来点火电推销器,实现在弹道轨迹的不同点解除保险的功能。
猜你喜欢
发光学报(2022年7期)2022-08-05 04:41:08
中国石油石化(2020年14期)2020-01-18 06:20:47
上海保险年鉴(2018年0期)2018-03-17 03:02:08
上海保险年鉴(2018年0期)2018-03-17 03:01:58
上海保险年鉴(2017年0期)2017-04-03 19:35:06
科技创新导报(2016年1期)2016-05-30 09:38:13
中国塑料(2016年7期)2016-04-16 05:25:55
化工管理(2015年3期)2015-03-23 09:17:39
决策与信息(2014年20期)2014-03-11 07:15:24
河南城建学院学报(2014年6期)2014-02-27 07:08:59