汽车悬架振动系统的多目标优化设计
2019-08-23 02:44贾爱芹宋辉李玲
电子技术与软件工程 2019年14期
文/贾爱芹 宋辉 李玲
1 引言
现在人们越来越重视汽车的乘坐舒适性和操纵稳定性,而悬架对汽车的平顺性、操纵稳定性和乘坐舒适性等具有较大影响,因此对悬架系统优化设计至关重要。运用仿真手段对平顺性和操稳性进行优化,国内外在这方面已经开展了不少研究。本文建立1/2四自由度汽车悬架模型,结合方差和关联度的特点,用可靠灰色粒子群算法对其参数进行了多目标优化设计,来实现汽车悬架的多目标优化问题求解。
2 四自由度汽车悬架优化模型
以1/2车体为研究对象,建立4自由度系统学模型,建立其振动方程:
式中,D为刚度矩阵;C为阻尼矩阵。l、h—前、后轮距离;
m1、m2—转动惯量;I—轴的非簧载质量;m3—簧载质量;
z1(t)、z2(t)—前、后非簧载垂直位移;e0(t)—车身垂直位移;
d1、d2—前、后轮胎刚度;d3、d4—前、后悬架弹簧刚度;
c1、c2—前、后轮胎阻尼系数;c3、c4—前、后悬架阻尼系数;a1(t)、a2(t)—前、后轮激励。
3 悬架参数优化设计模
3.1 设计变量
3.2 约束条件
悬架的动挠度要被限制在一个安全范围内,一般要求

式中:e0-e1、e0-e2—前、后桥位移;emax—最大动挠度,一般取80mm。
3.3 目标函数
车体垂向加速度均方根值为:

前、后轮胎对路面的瞬时动载荷分别为:

由于U1(t)和U2(t)均为随机载荷,则前、后轮胎动载荷的均方根值分别为:

式中:N—采样数目。前、后轮均方根值为:
H1(x)、H2(x)、H3(x)为目标函数,g1(e)、g2(e)为约束条件。
4 可靠灰色粒子群优化算法
4.1 基本粒子群算法
标准PSO算法公式为:
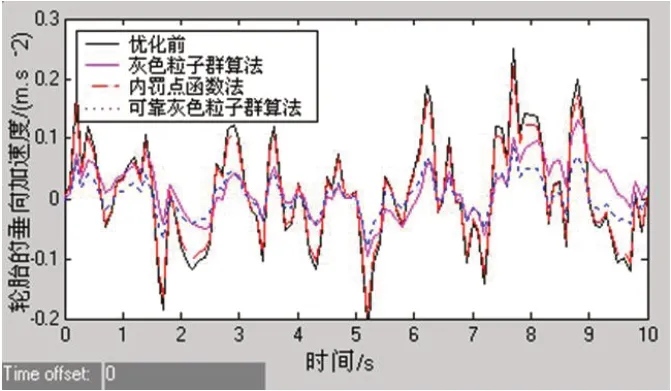
图1:车身垂向加速度均方根值仿真变化曲线
式中:i=1,2,…s,s—微粒的总数;Yi—粒子的当前位置;Vi—微粒的速度;ω—惯性权重;u1和u2—学习因子;Tbest、Qbest—个体极值和全局极值;rand()—随机数,rand()∈(0,1);Yi=(x1,x2,…,xs)、Vi=(v1,v2,…,vs)—粒子在S维空间中的位置和速度。
4.2 可靠灰色关联度
(1)计算关联度
式中,ρ为分辨系数,,通常取ρ=0.5。
(2)计算平均关联度:

关联系数序列的方差为:

(3)计算可靠灰色关联度:

4.3 可靠灰色粒子群算法
(1)求F1(x)、F2(x)和F3(x)在约束条件式(3)下的最优值组成基准矢量序列:

(2)初始化Yi、Vi,代入式(5)、(8),得目标矢量序列:
(3)求Yi可靠关联度,比较大小,求出Tb和Qb;
(4)用式(8)、(14)、(15)更新各粒子的w、Vi及Yi;
(5)选最优Yi及其对应R0i,并将R0i和Yi存储在Tb中,比较Tb、Qb,更新Qb;

表1:变量取值范围

表2:悬架结构参数

表3:悬架参数优化结果
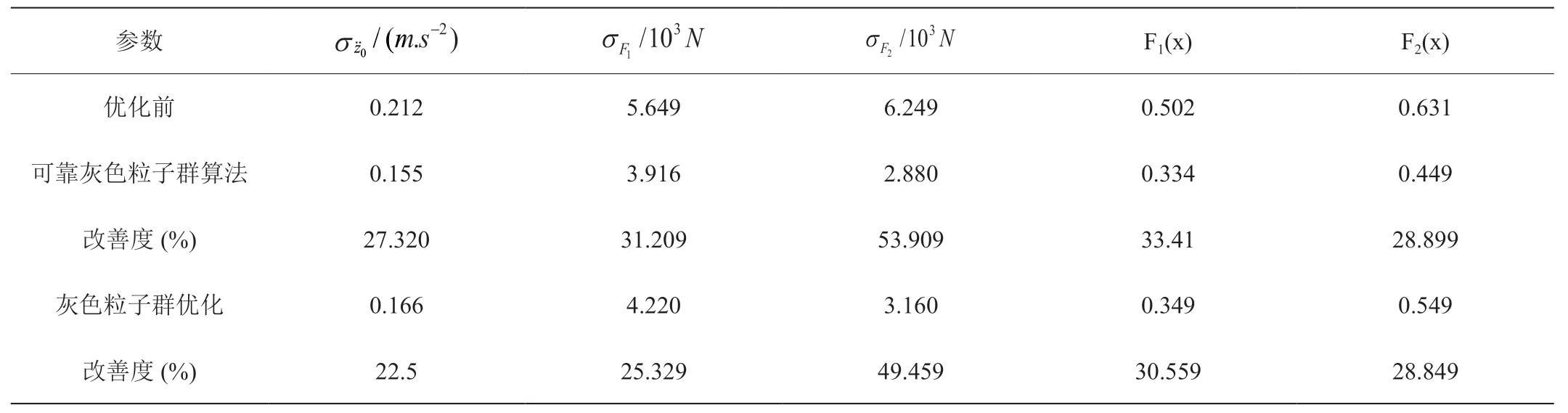
表4:车身垂向加速度和前、后轮动载系数均方根值优化结果
(6)若条件满足停止搜索,选最大的Yi及对应的粒子作为结果输出,否则,返回(4)。
5 算例结果与分析
以某10t载货汽车为例。令a=3.0m,b=2.6m,a、b—前、后桥至质心的距离,其它参数见表2。设货车行驶在B级路面,速度为28.00m/s。
利用不同的优化算法得到的优化结果见表3。
由表3知,k减少,c增大,且前悬架参数k3变化比后悬架参数k4变化小,使悬架系统性能变好。
表4为不同算法下 、 、 、F1、F2优化前后结果。 —车身垂向加速度、前后轮胎动载荷和前、后轮胎动载系数均方根值。
由表4知,两种不同的优化方法都使车身有不同程度的改善,提高了乘坐的舒适性。
利用matlab/simulin软件对该模型在时域内进行仿真,结果如图1。由仿真结果也验证以上结论的正确性。
6 结论
利用可靠灰色粒子群算法实现汽车悬架系统多目标优化模型求解。通过优化不仅可以提高车辆的舒适性,还可以减小重型载货汽车对路面的动载,减轻对路面的损伤。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
机械设计与制造(2022年5期)2022-05-19
汽车零部件(2019年10期)2019-11-13
小学生学习指导·爆笑校园(2019年6期)2019-09-10
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
汽车文摘(2015年3期)2015-12-11
汽车维护与修理(2014年10期)2014-02-28
机械与电子(2014年2期)2014-02-28
空气动力学学报(2013年2期)2013-10-21