
通过雷达桅修改降低船舶空高的实例研究
2019-08-20 08:47曹湘伟
江苏船舶 2019年3期
李 强,曹湘伟
(江苏新时代造船有限公司,江苏 靖江 214500)
0 引言
雷达桅是各类海上航行船舶必备的舾装件之一。雷达桅上安装的雷达、天线、失控灯等各类信号灯,以及风速风向仪、汽笛等设备,起到海船正常航行和应急避碰的辅助作用。一般情况下,雷达桅设计是在船舶初步设计过程中依据船舶的主尺度以及航行路线的条件进行的,并在详细设计过程中具体细化并送审认可。随着船运市场的变化,船东可能会调整和变更船舶的运营航线,使得船舶的空高限制性发生变化。这种变更要求一旦出现在船舶建造后期,特别是在上层建筑已经完工的情况下,相关的修改设计会因为受到各种条件限制而非常困难。本文以111 000 t成品油船的后期空高变更为例,研究通过修改雷达桅来实现空高限制调整的方法和设计过程。
1 船舶变更空高的设计条件
111 000 t成品油船入级美国船级社(ABS),船长251.84 m,船宽44 m,原设计空高限制距基线57 m。上层建筑位于船艉区域,罗经甲板距基线41.3 m,雷达桅含天线高度为15.3 m,艉部机舱棚烟囱高度距基线46.8 m。该船海试完成后,由于市场原因,船东需要变更该船运营航线,改道密西西比河航线。该航线吃水限制为41.46 m,经计算吃水后,船舶空高需要限制到距基线49.78 m。
2 船舶变更空高的初步设计
2.1 变更空高修改的限制条件
如果空高变更幅度接近或超出了雷达桅高度,就需要对整个上层建筑高度进行修改,这种修改应当是船舶初步设计的范围,在船舶建造后期修改很难实现并且工期长、成本高,不属于本文讨论对象。依据上述船舶变更空高的设计条件,本船整个空高只需要降低7.22 m,在上层建筑及其内装已经完工的情况下,所有的修改可以考虑在雷达桅上进行。
如果雷达桅还保留原有形式,则雷达桅总高需要从15.30 m降低到8.48 m,净降低6.82 m。另外,罗经甲板和雷达桅的设备比较多,因此修改时还要综合考虑磁罗经的4 m安全距离要求、信号灯360°环照范围、信号灯间距离、信号灯盲区、雷达盲区等因素。
2.2 雷达桅初步选型过程
原有雷达桅见图1。雷达桅主桅体呈锥形,雷达平台高度位于距罗经甲板8.3 m处。如果不改变雷达平台上灯桅的高度,则该平台需要下降的幅度为6.82 m,平台高度将位于距罗经甲板1.5 m处。如直接将雷达桅主桅体截断掉6.82 m,会出现3个问题:一是主桅体上布置了6组12只苏伊士运河信号灯,平台下降后将与信号灯位置重叠,信号灯需要移出;二是雷达平台将与磁罗经的安全距离范围重叠;三是雷达桅总体重心虽然降低,但主桅体变细,雷达平台及灯桅振动可能变大。因此,设计时选择放弃基于原雷达桅进行简单修改的思路,准备重新设计雷达桅。

图1 原有雷达桅简图(单位:m)
方案1:设计的首选方案是考虑雷达桅上的所有设备都限制在空高内,即雷达和灯桅顶部的卫通C站天线、莫氏灯最高点都设在49.78 m的位置。依据IMO SN.1/Circ.271的规定,雷达的后135°区域内总扇形盲区大小不得大于20°,并且雷达S/X波束照射的垂直方向25°的范围内不得安装舾装件,以避免造成假回波。雷达艉部盲区示意总图见图2。从图2看出,在49.78 m位置处,由于机舱棚的存在,单个雷达的盲区已经超过了26°,如果按这个条件进行设计,则需要减少机舱棚对雷达盲区的影响。在雷达桅受到磁罗经的安全距离的限制无法前移的情况下,只能修改机舱棚宽度以避开雷达照射,或者降低机舱棚高度,避开S波段雷达垂直方向25°和X波段雷达垂直方向20°的波束照射角度。修改内容包括机舱棚结构和内部布置,成本高昂,所以这样的设计是不经济、不合理的。
方案2:采用逆向思维倒推设计条件,即从机舱棚的顶点开始,以满足雷达照射角度的要求为条件,反向推断雷达所在位置和高度。经计算,雷达位于51.17 m处,即距罗经甲板9.87 m的高度,并往艉部方向平移1个肋位时,其照射范围高于烟囱结构,可以避免雷达产生艉部盲区。另外,经过核查,雷达在该高度能够满足IMO SN.1/Circ.271中关于艏部盲区不超过500 m或两倍船长的规定。这个方案下,雷达已经位于空高限制的上方,但雷达高度距离空高限制仅1.39 m,因此,考虑设计可倒式灯桅(以下简称“可倒桅”)与升降式雷达座(以下简称“升降雷达”)来降低天线、信号灯与雷达的高度以弥补高度差。考虑到雷达本身旋转时产生晃动,雷达座不宜过高,设定可倒桅和升降雷达所在雷达平台高度于距罗经甲板6.38 m处,距离空高限制2.1 m。至此,雷达桅修改设计完成框架和定位工作。
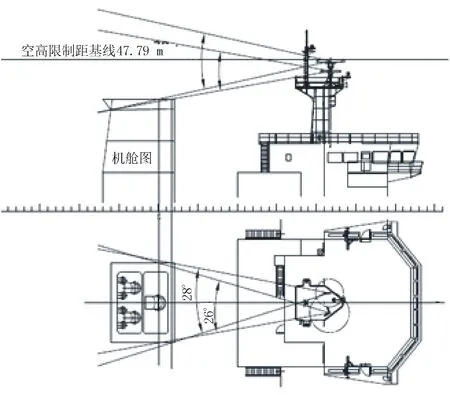
图2 雷达艉部盲区示意图
3 雷达桅的修改设计过程
3.1 雷达桅设备布置调整
设定雷达平台定位后,需要对雷达平台上的设备进行调整布置。
原雷达平台上的信号灯桅为桁架结构,由4根立柱加众多横梁构成。而可倒式桅杆一般为单柱体,并且为了能够保证桅杆正常起降,桅杆重量应当越轻越好。因此,设计时将原信号灯桅上的失控灯、深吃水灯、新加坡海峡灯等移出雷达桅,大船灯和油轮警示灯移到雷达平台上。
由于修改后新雷达桅主桅体长度为6.38 m,原雷达桅主桅体上的众多信号灯在现有长度范围内已无法布置,因此将原雷达桅主桅体上的苏伊士运河信号灯移出。
将原下方平台的汽笛移到主平台上,下方平台改建成升降雷达检修平台。修改后雷达桅主要设备布置见图3。
3.2 可倒式灯桅节点设计
在移出信号灯后,可倒桅上仅保留了莫氏灯、卫通C站天线和风速风向仪,因此可倒桅可适当降低高度。设计可倒桅主桅杆高度为4.4 m,含卫通C站天线及其基座总高为6.09 m,高出空高限制3.99 m。
可倒桅总重为478 kg。考虑到上半部分的重量达300 kg,呈明显的头重脚轻状态,升起时比较费力,降落时则需要防备突然倒落,因此选用了液压油缸作为可倒桅的动力装置,设计最大拉力为32 kN。
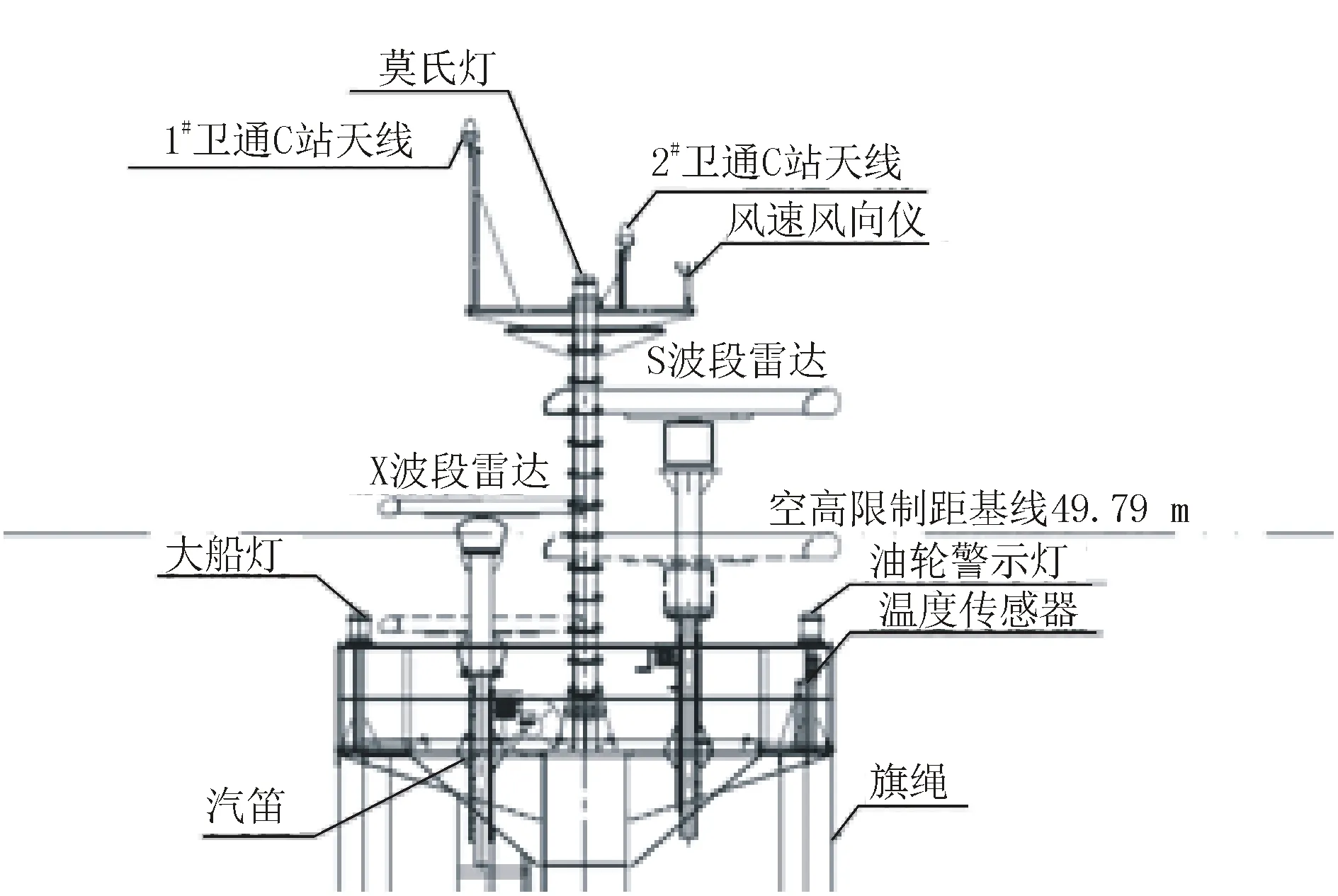
图3 雷达桅及平台设备布置示意图
可倒桅总成见图4。可倒桅为铰链连接结构,包括3个部分:可倒桅体、可倒桅底座及液压动力装置。可倒桅底座及液压动力装置座焊接于雷达平台上,平台反面设计了结构加强筋。液压动力装置与可倒桅桅体上的油缸支腿通过Φ40 mm的轴销进行连接。可倒桅桅体与可倒桅底座间采用异形法兰连接,法兰在靠艉部一侧有Φ40 mm轴销组成的铰链。为避免可倒桅水平状态下升起时的力矩过大,设计可倒桅与雷达平台呈10°的倾斜,以利于升起操作。因此,设计时尽可能地将异形法兰和铰链位于可倒桅主桅的下端,法兰中心距雷达甲板0.38 m。正常工作状态下,该法兰是由螺栓连接固定好的,保持可倒桅的直立状态;通航限制状态下,需要先将法兰上的紧固螺栓拆除后,才能进行可倒桅的升降操作。
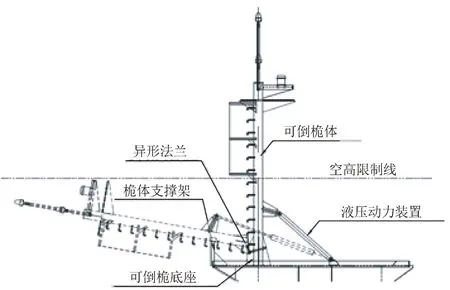
图4 可倒式灯桅总成图
3.3 升降式雷达座节点设计
升降雷达共有两件:S波段雷达较高,高出空高限制1.39 m;X波段雷达仅高出空高限制0.34 m。由于船东希望过桥时雷达仍能正常运行,因此调整S波段雷达高度为49.780 m,X波段雷达高度为48.975 m。这样既满足了空高限制要求,同时也避开了雷达S/X波束间互相照射干扰。唯一的顾虑是,尽管X波段雷达降低后离周边栏杆仍有120 mm的距离,但是考虑到X波段雷达自身的转动引起的晃动可能会导致其碰撞侧面栏杆,因而将X波段雷达半径范围内的栏杆设计成可拆式。该栏杆最上面的横档可拆。
S波段升降雷达的升降行程为1 165 mm,X波段升降雷达的升降行程为710 mm,均接近了其到雷达平台的高度值,因此升降雷达需要穿过雷达平台面,并将部分筒体设立在平台的下方。
升降雷达总成见图5。升降雷达由内管、外管及手动减速机3部分组成,内管、外管材料均为不锈钢。内管的外壁附有直齿齿条,将齿条最上下两端的齿封死可以作为限位装置,外壁做好高度标记用于辨识高度。外管的内壁附有特氟龙垫块,除润滑之外,同时兼有矫正升降垂直度的作用。内管、外管之间,在外管顶部设立锁紧锥套。操作时,雷达升降通过手动减速机操作,传动内管的齿条进行升降,内管升、降到位后,在内管下方插入蝴蝶螺栓用于支承托住内管,再通过拧紧螺栓将锁紧锥套下压,锁死内管,达到紧固的目的。

图5 升降式雷达座总成图
升降雷达是通过焊接安装在平台甲板上的。考虑到外管内部有特氟龙等附件,以及焊接容易引起外管变形,因此在外管上预先焊接一个锥筒作为平台上焊接件,准备一个锥筒通过螺纹连接到外管上作为平台下焊接件,通过焊接上下锥筒将升级雷达固定到平台甲板上。
3.4 独立信号灯桅节点设计与定位
由于原信号灯桅与原雷达桅主桅体上的各类信号灯均被移出新雷达桅,因此准备设计独立信号灯桅(以下简称“灯桅”)安放移出的信号灯。
3.4.1 灯桅的节点设计
灯桅结构见图6。灯桅采用单根立柱加斜撑的结构,具有结构稳定、重量轻优点。为避免干扰到可倒桅上的莫氏灯以及雷达平台上的大船灯、油轮警示灯,灯桅不宜过高。根据实际条件设计灯桅主桅体高度为5.55 m,顶部失控灯安装后总高为6.3 m。
灯桅伸出的信号灯灯座垂直方向间距1 m,符合信号灯安装的要求。最下面的一盏信号灯距离罗经甲板1.07 m,超出周边栏杆1.05 m的高度。
3.4.2 灯桅的定位
最初灯桅安装于雷达桅两侧,与雷达平台前端平齐。在干涉检查中发现,该位置已经布置有F站天线,并且由于船名牌的遮挡,信号灯需要伸出罗经甲板栏杆外,才能保证单侧信号灯180°环照无遮挡。因此,综合考虑上述因素和罗经甲板反面的结构加强位置,将信号灯桅前移3个肋位,放置于罗经甲板中前部的舷侧,与驾驶室移门的围壁结构对齐。安装时,需要微调船名牌及其照明灯的位置和高度,避免干扰信号灯。
4 雷达桅附件的功能试验及修正
雷达桅和信号灯桅制作安装完成后,对其舾装附件进行功能试验。
4.1 可倒桅的起降操作试验
在试验过程中,发现可倒桅在向艉部方向降下时,总会偏向左舷。经分析,灯桅顶部的1号与2号卫通C站天线座的高度不一致,肘板大小不一致,是导致可倒桅重心偏向左舷的原因,并且由于可倒桅主桅体随之倒向左舷,主桅体的重量加重了偏向的程度。经计算,1号与2号卫通C站天线座的重量差仅为27 kg,因此解决问题的关键是在可倒桅降落的初期保证不偏向。考虑到舱盖、钢质门等同为铰链连接的舾装件,对可倒桅的铰链进行改进。在原有铰链的两侧,另增加两个同轴的随动铰链,对可倒桅的运动方向进行限制,铰链通过斜撑连接到主桅体上。修改完成后,试验效果良好,可倒桅成功倒入桅体支撑架。
4.2 升降雷达的升降操作试验
雷达降下后,发现较高的S波段雷达的随行电缆处于自由状态,有缠绕雷达的隐患。因此在S波段雷达附近甲板上焊接1根直立圆管用于绑扎电缆,限制其自由状态。另外,还准备了升降雷达操作警示牌,提醒操作人员避免雷达操作顺序错误造成S/X波段雷达间的碰撞。
4.3 雷达桅总高度的测量
在实船试验的同时,对雷达桅进行测量。在可倒桅倒下,以及升降雷达降下的状态下,经测量,雷达桅总高度满足变更后的船舶空高限制要求,船舶空高变更得以实现。
5 结论
通过对111 000 t成品油船雷达桅的修改,经实船测试验证,解决了船舶后期空高限制变更的问题,得出如下结论:
(1) 在船舶建造后期,修改雷达桅是可以解决空高变更问题的方法之一。但如果空高限制修改幅度过大,接近或超出雷达桅高度,通过修改雷达桅来解决问题则不可实现。
(2) 在设计修改雷达桅时,应充分综合考虑雷达、信号灯、磁罗经、甲板结构加强、栏杆舾装件等众多因素,避免忽略某个因素而导致返工。
(3) 除雷达桅主桅体降低外,可倒式灯桅和升降式雷达座等舾装附件是有效解决信号灯和雷达高度调整的方法。可倒式灯桅和升降式雷达座等安装完成后,还应当通过功能试验对其进行验证。
(4) 本文讨论的雷达桅为单主桅体结构后桅,可以为同类型的单主桅体雷达桅修改提供借鉴。对于另外一种常见的多支柱型雷达桅后桅,由于该型式雷达桅的雷达平台较低,且平台在船宽方向尺寸较大,艏艉方向相对较小,遇到同样需求时,其修改方案需要另行讨论,但其设计限制的相关条件与本文实例基本一致,可以选择性地参考。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
航天返回与遥感(2022年2期)2022-05-12
波谱学杂志(2022年1期)2022-03-15
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
小天使·一年级语数英综合(2018年6期)2018-06-22
小学生作文选刊·低年级版(2016年6期)2016-06-24
华人时刊(2016年19期)2016-04-05
