舰载捷联惯导数字仿真器的设计与研究
2019-08-11 10:18:54霍庚
海军航空大学学报 2019年3期
霍 庚
(92941部队,辽宁葫芦岛125001)
近年来,光学陀螺仪技术日趋成熟已逐渐取代传统的机械式陀螺和液浮陀螺仪。加之计算机技术飞速发展,国内舰载捷联惯导系统已经具备了从渤海海域到南海海域的跨大纬度、长周期的海上导航的能力,但目前国内对于边界条件下的导航性能评估仍处于研究阶段[1]。尤其是在极地地区,恶劣的自然环境、特殊的地理位置和电磁条件对导航性能会产生较大的影响,特别是极区航向误差急剧发散,无法实现定位定向[2-4]。因此,基于对边界条件尤其是极区环境下的惯导系统性能的研究亟待解决,但获取该工作条件下惯导系统输出的实时导航数据实施难度大。这就需要一种可以模拟舰船运动的仿真器,来获取舰载惯导系统的实时导航数据,通过计算机仿真模拟不同海况条件、不同的航行区域、不同的航行状态以及各种边界工作环境,为进行边界条件下惯导系统精度评估方法研究提供参考。
文献[5-6]用软件设计飞机的轨迹发生器,模拟飞机的爬升、直线飞行、转弯等飞行模式,输出飞机在飞行过程的位置、姿态等导航参数以及模拟惯性元件所测得的比力与角速度输出。由于海况条件与飞行环境略有不同,舰船的运动轨迹相对于飞机的飞行轨迹更加的复杂[7-9]。文献[10]假设舰船是一个刚体,在不考虑纵倾与升沉运动情况下模拟了理想状态下舰船的运动状态。
本文在研究典型海况、惯性器件偏置误差对数据的叠加影响的条件下,综合考虑了舰船水平面直线航行、旋回状态以及舰船的大幅度摇摆及升沉,设计了一种新型水面舰船捷联惯导系统仿真器,为研究边界工作条件下惯导系统性能提供试验依据。
1 仿真器方案设计
1.1 功能实现
基于舰船空间运动的舰载式惯导系统仿真器可以灵活设置舰船的航行轨迹,同时生成相应的航行轨迹数据,模拟不同的航行状态,通过6个自由度的摇荡运动(纵摇、横摇、艏摇、纵荡、横荡和垂荡)模拟不同海况[11-12],通过设置惯性器件(陀螺仪、加速度计)的随机误差模型的参数来仿真不同精度的惯性器件,进而完成不同航行状态、不同海况条件、不同惯性器件精度条件下捷联惯导系统输出数据的实时仿真。该仿真器应具有以下主要功能:
1)能够设置舰船的各种运动状态(匀速航行、旋回运动、蛇形机动);
2)能够配置惯导系统相关参数;
3)惯导系统仿真数据与航迹模拟真实数据之差即为导航参数误差数据,系统自动生成误差曲线,增强可视化的效果;
4)仿真数据存储在相应的文件中,可以以数据曲线和数字界面的形式直观显示,为后续分析研究提供数据源;
5)用户操作简单方便,具有友好的人机交互界面。
仿真软件启动后,首选进行系统各项参数的配置:初始条件、舰船运动状态、捷联惯导参数、仿真步长、仿真时间;配置完成后进入仿真阶段。
1.2 仿真器结构原理
舰载捷联惯导仿真器采用模块化的结构形式[13-14],由5个核心模块组成:舰艇航行轨迹发生器、陀螺仪仿真模块、加速度计仿真模块、解算模块和数据显示器模块。根据舰船的空间运动模型设计航迹发生器,产生真值航迹数据,航迹参数叠加上惯性器件随机误差,产生陀螺仪与加速度计的实际输出(比力和角速度);通过捷联惯导解算程序输出解算结果,与舰船航迹点参数对比得到误差值;最后,通过仿真数据显示器将惯导数据、真值数据和误差数据显示出来,并生成相应的文件存储。仿真器的结构原理图如图1所示。

图1 惯导系统仿真器结构原理图Fig.1 Schematic diagram of INS simulator
2 仿真器的设计及实现
2.1 舰艇航迹发生器
舰船在波浪中受到风、浪和流的作用产生6个自由度的运动,即横摇、纵摇、艏摇、横荡、纵荡、垂荡。在不同的航态(不同的海况、不同的航速、不同的航向)下呈现不同的运动规律。
本文根据舰船的运动特性建立空间运动模型,通过航迹发生器获得航行轨迹真值数据,为捷联惯导解算提供数据源,以此检验仿真系统的正确性及精度。假设舰船处于典型海况条件下,在舰船的航行过程中,其运动信息随时间呈现出类似三角函数的波动性,其摇摆模型均是时间函数[15]。以下是模拟舰船轨迹得到的姿态角、速度与位置的方程,可以得到任意时刻舰船航行的轨迹数据。这些数据可作为真实数据,进行导航解算,给出陀螺仪和加速度计无误差的数据。
姿态角方程为:


仿真器可模拟的姿态角范围:-45°~+45°,边界条件为 ±45°,艏摇范围:0°~360°,变化率 30(°)/s,周期均为8~15 s。
速度方程为:

仿真器可模拟的速度范围为-10~45 kn,边界条件为-10 kn、45 kn,水平加速度±1.0 g,垂向加速度1.0±1.0 g,纵横荡范围±0.3 m,垂荡范围±0.2 m,周期均为8~15 s。
位置方程为:

式(3)中:R表示地球半径;h表示舰船所在位置距地球表面髙度;λ、φ表示舰船所在位置的经纬度;vx、vy、vz同式(2)。
仿真器适用海域为纬度:-90°~+90°,边界条件为±90°。
2.2 陀螺仪仿真模块
陀螺仪是敏感载体角运动的元件,在敏感信息的过程中受到地球自转和载体运动的影响[2],本身存在误差。同时,考虑到陀螺仪的随机漂移δb,陀螺的敏感输出为:

式(4)中,i表示惯性坐标系。
陀螺仪的随机漂移由随机常值漂移和白噪声构成:

式(5)中:ε0为随机常值漂移;ε为快变漂移,即白噪声过程。
2.3 加速度计仿真模块
加速度计是敏感载体线运动的元件,由哥氏定理知,舰船相对惯性空间的加速度等于运动坐标系中的加速度加上运动坐标系相对惯性空间的旋转角速度与运动坐标系中的线速度的叉乘[2],又由于加速度计的测量误差与刻度系数误差的存在,加速度计的实际输出应为:

式(6)中:I表示单位矩阵;δKA表示加速度计表的标度因数误差构成的3×3对角矩阵;δKB表示加速度计表的测量误差构成的3×3对角矩阵。
因为加速度计相关误差相对较小,为方便分析,加速度计的测量误差考虑随机常值误差与量测白噪声[16-17]。
2.4 捷联惯导解算模块

本仿真器涉及极区等边界条件仿真,采用传统游移系为导航坐标系的力学编排将不再适用[18]。因此,在极区仿真条件下采用格网坐标系和横向坐标系作为导航坐标系,选取对应格网导航算法或横向导航算法,并在上述惯导解算模块中加入导航方案自动切换功能,设计相应的切换逻辑,避免仿真轨迹从低纬度进入高纬度时因舒拉振荡等原因出现频繁穿越,从而影响惯导解算。极区导航方案切换逻辑如图2所示。
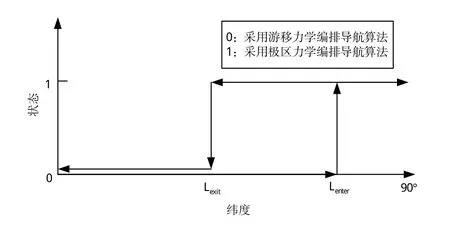
图2 极区导航方案切换逻辑图Fig.2 Switching logic diagram of polar navigation scheme
2.5 仿真数据显示器
在Visual Studio 2008开发环境下,基于MFC应用程序建立各类对话框,根据需要添加控件[19]。具有友好的人机交互界面,可以实现系统初始条件设置、初始参数设置、陀螺仪参数装订、加速度计参数装订、仿真数据显示等。为满足系统的实时性、可靠性和稳定性,将多线程、动态链接库等技术应用其中。
3 系统仿真及分析
3.1 仿真过程
在仿真开始前首先进行各种参数设置,主要包括初值设置即初始的位置(经纬度)、初始运动状态(航向、速度);惯性器件参数设置即陀螺仪的常值漂移、随机游走系数、加速度计常值偏置、量测白噪声;仿真步长及仿真时间。初始值设置完毕,系统进入仿真阶段,调用动态数据库中SINS.dll相关程序,仿真结束系统自动生成误差曲线,进入数据显示界面查看。
3.2 仿真结果
设陀螺仪常值漂移为0.001(°)/h、陀螺随机游走系数为0.001(°)/h,加速度计零偏为1×10-5g、加速度计量测白噪声标准差为1×10-5g,仿真时间为36 h(大于地球自转周期24 h)。
仿真分以下2种情况进行。
1)静态下仿真(无摇荡状态):设初始经度为东经120°,北纬 46°,航向 220°,初始速度 0 kn ,捷联惯导误差曲线如图3~7中的图a);
2)边界条件下仿真(摇荡状态):基于现役导航装备适用范围,设初始经度为东经180°,北纬75°,航向220°,初始速度 40 kn,摇荡周期8~15 s,捷联惯导误差曲线如图3~7中的图b)。
图3~7中,由图a)的动态仿真曲线可以看出:通过设置不同的参数可以得到静态条件下相应的仿真曲线,该曲线体现出了惯导系统位置、姿态等误差方程的特性,即长时间条件下误差呈发散趋势。同时,受三大振荡周期(舒拉振荡、地球振荡、傅科振荡)的影响,与惯导误差传播规律相同,说明仿真器工作正常。
图3~7中,由图b)的仿真曲线可以看出:通过设置边界条件下的各项参数,得到了边界条件下的误差曲线,该曲线同样反映了惯导系统的误差特性,同时可以看出受极区导航算法影响,导航精度有所下降,但结果满足所设仿真条件下惯性器件性能水平,验证了该仿真器捷联解算模块算法的正确性,达到了仿真器设计目的,对进行惯导系统理论研究有一定的辅助作用。

图3 横摇误差曲线Fig.3 Curves of rolling error

图4 纵摇误差曲线Fig.4 Curves of pitching error

图5 航向误差曲线Fig.5 Curves of heading error

图6 经度误差曲线Fig.6 Curves of logitude error
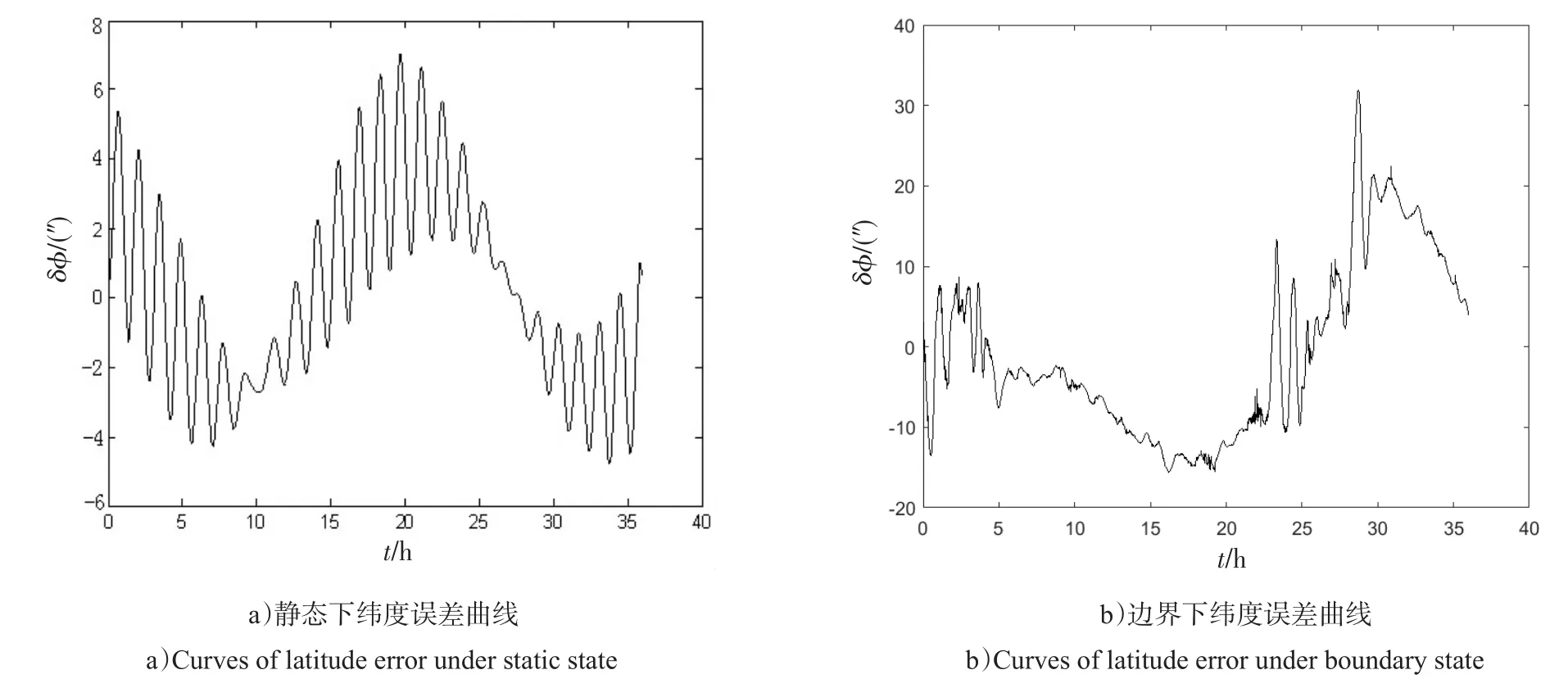
图7 纬度误差曲线Fig.7 Curves of latitude error
4 结论
本文在对舰船运动特点充分分析的基础上,建立惯性器件误差模型,在Visual Studio 2008开发环境下实现了一种新型船用捷联惯导系统数字仿真器,获取舰艇6个自由度运动真值以及对应惯导系统实时输出数据。该仿真器实现了不同航行状态、不同海况条件及不同参数惯性器件精度条件下的数字仿真,通过动态边界条件下数据误差分析反映了惯导系统的误差特性,并实现了极区等边界条件仿真功能,验证了该仿真算法的正确性与可行性,有效解决了舰载导航系统性能评估受试验海域和试验载体等因素限制的问题,对边界条件下惯导系统性能评估的研究具有一定的工程应用参考价值。
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
火控雷达技术(2016年1期)2016-02-06 02:18:01
计算机工程(2015年4期)2015-07-05 08:28:57
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
测绘科学与工程(2013年2期)2013-03-11 15:07:29
西安交通大学学报(2012年2期)2012-04-29 00:44:03