
双叉臂式独立悬架四轮定位的效率提升
2019-08-07 06:19罗晓龙熊武李海宁张德安
汽车实用技术 2019年14期
罗晓龙,熊武,李海宁,张德安
双叉臂式独立悬架四轮定位的效率提升
罗晓龙,熊武,李海宁,张德安
(江西五十铃汽车有限公司,江西 南昌 330800)
针对双叉臂式独立悬架的四轮定位提出了一种高效的调整方案,该方案采取偏心螺栓初始值设定→人工微调→助力臂定扭的方式进行调整,极大的提升了四轮定位的节拍,降低了员工的劳动强度。
双叉臂;四轮定位;效率提升
前言
在汽车制造业中,JPH常被用来测算和表征企业的生产能力。由于采用流水线的生产方式,单个工序的生产瓶颈往往对整个工厂的生产节拍有着至关重要的影响。而双叉臂式独立悬架的四轮定位往往通过调节前轮左右下摆臂的4个偏心螺栓来实现,因为下摆臂安装在底盘线,安装完毕后车辆行驶至检测线的四轮定位工位,每个偏心螺栓的位置都需要先根据实际情况进行调整,并且进行测力(力矩往往在200N左右),数量多加上强度高,其调整节拍往往很高,大部分总装车间采用新增四轮定位平台的方法来缓解此类问题,不但费用高而且占用场地,还需新增人员,成本较大。
本文通过对双叉臂式独立悬架的四轮定位调整工艺进行优化,将四轮定位的节拍提高了50%,极大的提高了生产效率,满足了现场需要。
1 工艺优化
1.1 偏心螺栓及横拉杆螺母初始值确定
首先需在下摆臂偏心螺栓上设置刻度线,车架上需设置标识线,如图1。

图1
然后将车辆开上集成式四轮定位台,根据电脑数据显示将前束、外倾角及主销后倾角调整至最佳的0值(前束:0°±0.14°;前轮外倾角:0°±30';主销后倾角:3°20'±45',基准值均可内置在设备参数中,员工仅需将数据调整至0即可),如图2。
此时记录下四个偏心螺栓刻度线与车架标识线的位置及拉杆螺母的螺纹牙位置。通过采集100台车辆数据为样本。取平均值确认初步的偏心螺栓、拉杆螺母初始值,将该数值反馈给底盘线的预紧工位,按要求对应偏心螺栓刻度线与车架标识线。车辆按照统一刻度装配拧紧后,行驶至四轮定位工位,查看并记录车辆四轮定位未调整前的各参数值,发现仅有20%左右的车辆在四轮定位工位不需要调整下摆臂螺栓数据便在合格范围内,省去了检测线工位的调节时间。而其它车辆均有一至四个参数处于合格范围边缘,对记录的参数进行统计分析,并对偏心螺栓的初始刻度进行微调。重复上述操作,发现车辆的一次通过率并没有明显的提升,一直停留在20%左右。这是因为车辆零部件的一致性无法保证,即使选择了合理的初始值,在保证装配一致性的前提下车辆的各项参数波动一样较大,仅仅靠初始值的设定难以大幅提高四轮定位的检测节拍。

图2
1.2 人工调整方案优化
在设定完初始值后,虽然车辆的一次通过率并不高,但各参数的数值基本均在合格范围边界波动,且波动的幅度并不大,如下图(标注★为不合格项):

图3 左侧前束NG,右侧前束、主销后倾角NG
同时,在四轮定位的调校过程中发现,前束、外倾、主销后倾角存在联动关系,且成一定的比例(1:-0.05:-0.2),即前束数值调整1,主销后倾角数值变化为-0.2,外倾值变化为-0.05,利用该比例关系,当发现如图3所示的情况是,左侧仅需调整前束螺母(-0.4+0.4=0),外倾角变(+0.075-0.02 =+0.055),主销后倾角变为(+0.561-0.08=0.481),均在合格范围内;而右侧也可通过单调整前束(-1.287+1.287=0),外倾角变为(=0.181-0.233=-0.052),主销后倾角变为(+0.8-0.257 =+0.54),也均在合格范围内。这种情况仅仅只需调整两个前束螺母就可以满足参数需求,极大的提高了四轮定位的检测节拍。
1.3 省力优化方案
无论下摆臂螺栓是否需要调节,因为底盘线工位偏心螺栓仅预紧(方便四轮定位调整时松开不费力),而偏心螺栓又属于关键项,有定扭要求,一般摆臂的力矩在200N左右,使用定扭扳手定扭不但费时,而且员工的劳动强度也较大。因此使用定扭电枪定扭不仅可以满足工艺要求,同时也可以减轻员工劳动强度,提高定扭效率。但是由于力矩较大,定扭电枪的总体质量较重,且反作用力大,必须设计省力化工装配合定扭电枪使用,才可达到预期的效果。
一般主机厂四轮定位调整工位都设置在地坑内,且站位平台狭长,设计难度较大。如图4:

图4
本文设计的省力化工装,结合生产实际,将基座固定在塌台外侧,减少与员工操作空间的干涉,并且利用悬臂作为反力臂,避免加增反力杆导致定扭电枪在操作时与车架干涉,操作不便。如下图5:
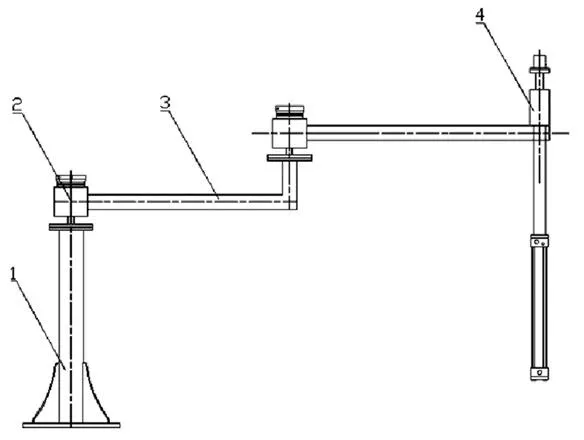
图5 1—基座,2—轴承,3—悬臂,4—弯头定扭电枪
当摆臂螺栓调整合格后,使用省力化工装结合定扭电枪,可迅速将螺栓拧紧至规定力矩,比人工使用定扭扳手劳动强度大大降低,效率也有很大的提高。
2 结束语
相较于传统四轮定位调整及定扭工艺,本次采用的偏心螺栓初始值设定+人工微调+助力臂定扭,可将四轮定位的整体节拍提升50%以上,极大的提升了效率,减轻了员工的劳动强度。
[1] 刘云泊,顾承扬.浅析如何提升总装车间后桥四轮定位一次合格率[J].汽车实用技术, 2018(17): 256-259.
[2] 洪翎,王强,刘道全.乘用车总装检测线工艺设计及应用[J].机械制造与自动化, 2017(03): 89-90.
[3] 黄永毅,蒋玲丽,周浩浩.四轮定位设备一致性控制改进[J].时代汽车, 2018(12): 113-117.
[4] 胡国武.前束外倾锁紧螺母拧紧力矩值保存和追溯[J].时代汽车, 2018(12): 151-153.
[5] 刘冬梅,王五林,曲大义,杨希锐,贾彦峰.基于悬架系统的四轮定位参数优化分析[J].青岛理工大学学报,2017(06): 102-107.
Efficiency improvement of four-wheel positioning of double fork armindependent suspension
Luo Xiaolong, Xiong Wu, Li Haining, Zhang Dean
( Jiangxi ISUZU Motors CO., LTD, Jiangxi Nanchang 330800 )
An efficient adjustment scheme is proposed for the four-wheel positioning of the double-fork arm independent suspension, which adopts the method of eccentric bolt initial value setting, manual fine-tuning and booster arm setting and torsion adjustment, greatly improving the four-wheel positioning beat and reducing the labor intensity of employees.
Double cross arm; Four-wheel positioning; Efficiency improvement
U468.2
A
1671-7988(2019)14-156-02
U468.2
A
1671-7988(2019)14-156-02
罗晓龙,硕士,机电工程师,就职于江西五十铃汽车有限公司,研究方向:汽车总装工艺的优化。
10.16638/j.cnki.1671-7988.2019.14.050
猜你喜欢
测井技术(2022年3期)2022-11-25
数字技术与应用(2022年3期)2022-04-14
汽车零部件(2022年3期)2022-03-29
北京航空航天大学学报(2021年4期)2021-11-24
汽车工程(2021年5期)2021-06-09
汽车实用技术(2020年15期)2020-10-20
汽车实用技术(2020年8期)2020-07-09
意林(2020年10期)2020-06-01
汽车实用技术(2019年16期)2019-09-11
故事作文·高年级(2018年8期)2018-08-14
