几种典型编队的多机无源定位布站分析
2019-08-05 09:39王程民平殿发
舰船电子工程 2019年7期
王程民 平殿发 张 涵
(海军航空大学 烟台 264001)
1 引言
在空中电子对抗领域中,谁能快速、隐蔽、准确、及时地掌握敌方各类型辐射源具体位置,谁就能反制对方,夺取战场制信息权,进而夺取战争的胜利。无源定位系统本身不主动辐射电磁波,通过被动侦收目标辐射源信号实现对目标的探测及定位,具有电磁隐蔽性好,战场生存能力强的特点,能够很好地进行对辐射源的定位任务[1~3]。近几年来机载无源定位技术研究有了深入发展,由于其探测距离远,隐蔽性好,随机布站灵活等优点,受到了各军事强国的高度重视。
战机在执行空中作战任务中,由于具体任务,态势情况等不同,其具体编队样式也会不同。本文以五架战机执行协同无源定位任务中四种典型的编队队形为布站模型,采用无源时差定位原理,以“几何精度稀释”(GDOP)高低为评价标准,分析对比不同编队队形定位精度并得出结论,为提高多机协同无源定位能力提供理论参考。
2 无源时差定位原理分析
时差定位(Time Differenceof Arrival,TDOA)几何上也称为双曲线(面)定位,是通过测量辐射源信号到达不同观测站的时差构建时差观测方程,联立多个时差观测方程即可计算出辐射源位置[4]。无源时差定位由于定位精度高、稳定性好等优点,在实际机载多平台无源定位系统中被普遍采用。在三维空间中,主副站间观测到的一个时差对应一个双曲面,多个观测站得到的多个双曲面相交即可得到辐射源位置。

图1 五机无源时差定位原理示意图
以五机为例,如图1所示,执行无源定位任务战机共有三架,其中 S0为主机,S1,S2,S3,S4为辅机,目标辐射源为T,其中Si=(Xi,Yi,Zi),i={0,1,2,3,4},目标T=(X,Y,Z)。由图1所示,S0分别与S1,S2,S3,S4确定的时差定位曲线相交于T,用公式表达其定位方程为[5]

式中,r0表示目标到主平台的距离,ri(i=1,2,3,4)表示目标到副平台的距离,Δri表示目标到主平台与到各副平台的距离差,c表示电磁波的传播速度,Δr0i表示信号到主平台与到各副平台的时间差。通过求解联立方程组(1)就可求得目标辐射源T的位置坐标。
3 无源时差定位精度理论推导
本文所指无源时差定位精度是以几何精度稀释GDOP(Geometric Dilutionof Precision,GDOP)为指标,通过对比GDOP值高低来衡量定位精度,GDOP 值越大,定位精度越低,反之越高[6~8]。文献[9~11]给出了GDOP详细的推导过程,并对影响因素参数进行了分析,应用其结论,给出五机GDOP推导公式:
对式(1)的等式两边微分,得下式:

式中
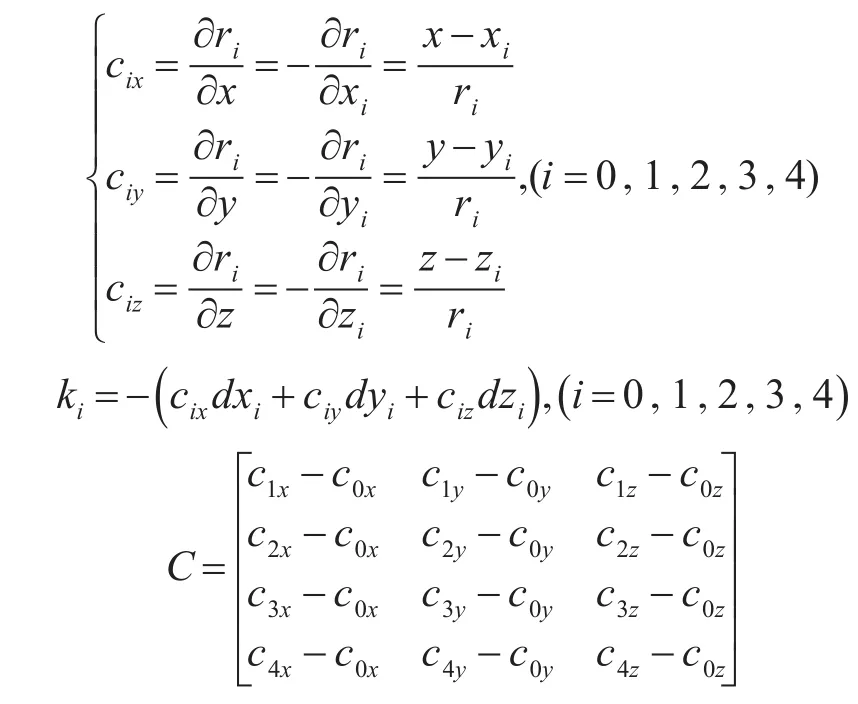
令
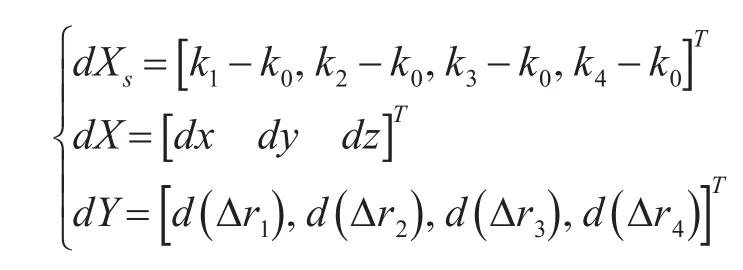
可得式(3)的矩阵表达式为

整理上式,则定位误差估计值如下式:

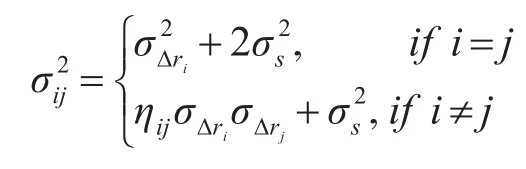
求解得到协方差:

式中


式中,L4是4×4阶方阵。
这里假设各平台位置的三坐标分量测量误差相等,即


式中,I4为4阶单位矩阵。令:

式中:
误差的协方差矩阵为

所以定位误差在x,y,z三个分量的方差为

则五站时差无源定位精度GDOP表达式为

4 布站影响因素分析
在一定的战场背景中,多机无源定位系统定位精度影响因素主要有:辐射源目标位置误差、定位系统中各站位置误差、到达时间误差以及各测量误差[12]。在其他条件一定的情况下,定位系统中各站位置即多机编队布站形式对误差的影响较大,可以通过分析不同编队布站形式对特定定位区域内的GDOP值大小来评判各个编队布站优缺点。
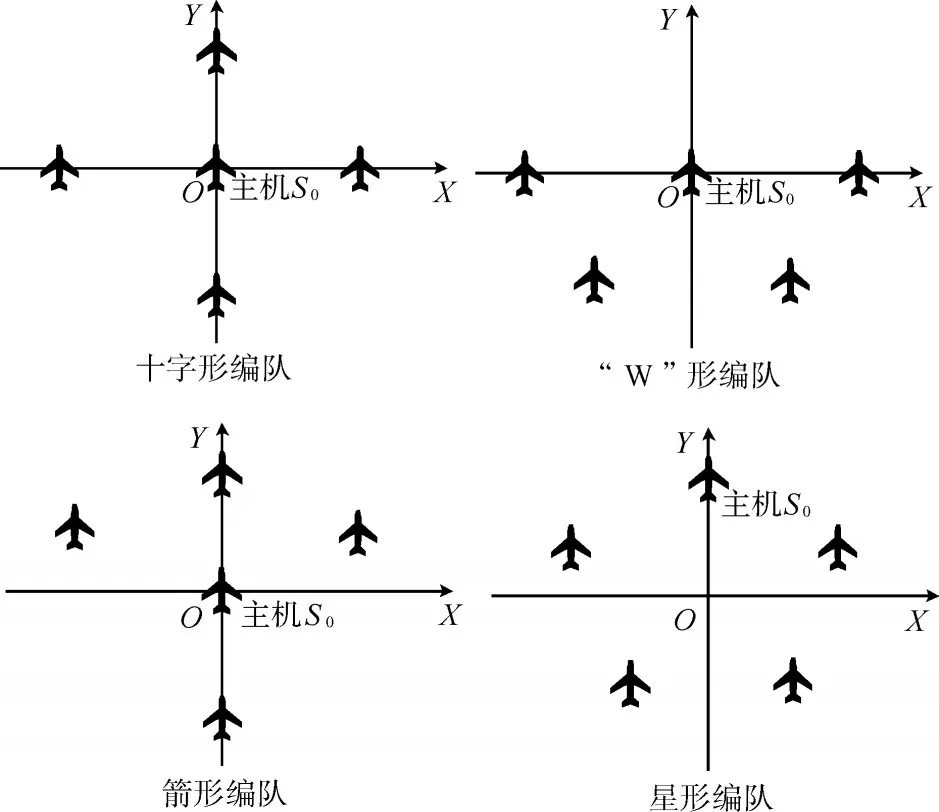
图2 四种典型编队
本文选取某些特定战场环境下五机执行协同无源定位任务中四种典型编队布站形式,分别对其在一定定位区域内的GDOP进行仿真,进而分析编队布站优缺点。
五机编队布站的四种典型形式是:十字形编队、“W”形编队、箭形编队和星形编队。如图2所示。
5 仿真结果与分析
5.1 不同编队布站对定位精度影响

图3 不同编队布站GDOP图
仿真条件设定:为确保能够定位,假设主机高度低于辅机,四个辅机同高,因为由上节公式推导GDOP的可知,当定位系统中五机处于同一高度时无法对目标进行定位。假设时差测量误差为20ns,站址误差为2km,主副机高度差500m,主副机间距16km。在(500km×500km)的范围内,进行200次蒙特卡洛仿真实验,得到四种典型编队的GDOP分布图,如图3(a)、(b)、(c)、(d)所示,图中“o”表示主机位置,“*”表示各辅机位置。
通过观察四种不同编队GDOP图,可以得到以下结论:
1)编队布站队形不同,其GDOP分布也不相同,并且不同的布站形式对一定范围内定位精度影响较大。
2)十字形编队定位精度分布近似圆形,四周分布比较均匀,比较适合在巡逻搜索阶段,对于不确定方位辐射源目标进行全方位侦查定位。
3)“W”形编队在X轴方向上定位精度较差,但是在上下Y轴方向上定位精度优于十字形编队,特别是在Y轴负方向上定位精度较高,适合在火控引导阶段组成“M”形编队前出两架战机,进行精确定位制导。
4)箭形编队在225°和315°方向定位精度较差,但是在Y轴方向定位精度较好,特别是在Y轴正方向定位精度明显优于其他编队队形,比较适合在初次定位确定目标方向后变换队形进行二次高精度定位。
5)星形编队在五边形各边垂直方向上定位精度较高,在主副机基线延长方向上定位精度较差,其定位精度与方向优越性在某些方向上不及其它三种编队队形。但是星形编队由于其构型特点在变换编队队形方面具有优越性,可以在短时间内变换成其它三种编队队形。
5.2 主副机高度差对定位精度影响
仿真条件设定:其他条件不变,以十字编队为例,固定四辅机高度,通过降低主机高度,拉大主辅机高度差,分别取主副机高度差h=100m,h=300m,h=500m和h=1000m时的GDOP分布图,如图4(a)、(b)、(c)、(d)所示,图中“o”表示主机位置,“*”表示各辅机位置。
通过分析主副机不同高度差仿真图可以得到以下结论:在编队队形以及定位区域一定的情况下,在一定范围内随着主副机高度差增加,定位精度增高,但是由于飞机飞行高度有上限和下限,高度差不能无限增大,而且通过仔细对比图4(c)、(d)两个图发现,到达一定程度后高度差增大,定位精度不会有明显增高。

图4 主副机不同高度差的GDOP图
5.3 主副机间距对定位精度影响
仿真条件设定:其他条件不变,以十字编队为例,分别取主副机间距d=5km,d=10km,d=15km和d=20km时的GDOP分布图,如图 5(a)、(b)、(c)、(d)所示,图中“o”表示主机位置,“*”表示各辅机位置。
通过分析主副机不同间距的仿真图可以得到以下结论:随着主副机间距增大,在仿真设定定位范围内不可定位区域逐渐减小,在可定位区域内定位精度逐渐增高。但在未来实战战场中,由于受到复杂电磁环境干扰,以及数据传输和通信联通距离的约束,机载无源定位系统中各机之间的距离不可能无限增大。

图5 主副机不同间距的GDOP图
6 结语
本文对五机执行协同无源定位任务中四种典型编队GDOP进行仿真,通过仿真结果可以得出:
1)十字形编队定位精度分布比较均匀,比较适合在巡逻搜索阶段,对于不确定方位辐射源目标进行全方位侦查定位。
2)“W”形编队在Y轴方向上定位精度优于十字形编队,特别是在Y轴负方向上定位精度较高,适合在火控引导阶段进行精确定位制导。
3)箭形编队在Y轴正方向定位精度明显优于其他编队队形,比较适合在初次定位确定目标方向后变换队形进行二次高精度定位。
4)星形编队在定位精度与方向优越性方面不及其他三种编队队形,但是便于队形重组。
5)对于某种特定编队仿真结果显示在一定范围内定位精度随着主副机高度差增加而增高,随主副机间距增大而增高,但是由于飞机飞行高度限制和通信距离限制,主副机高度差和间距不能无限增大。
猜你喜欢
舰船电子工程(2022年7期)2022-09-06
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2020年10期)2020-11-14
中国航海(2019年2期)2019-07-24
电子制作(2019年23期)2019-02-23
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
科学与财富(2018年12期)2018-06-11
北京航空航天大学学报(2017年6期)2017-11-23
中国科技纵横(2017年5期)2017-05-12