
车辆运行实时数据采集系统设计
2019-08-02 03:00张帆
微型电脑应用 2019年7期
张帆
(陕西国防工业职业技术学院 计算机学院, 西安 710300)
0 引言
随着我国汽车产业的扩大,汽车运输量逐步提升。而随着汽车运输的不断增加,汽车的安全性开始日益受到人们的重视,特别是客运专线运输车辆的安全,更是受到人们的高度关注。对汽车运动来讲,是一个非常复杂的过程。要保障汽车的稳定运行,需要各个系统的协调、配合,并且影响汽车安全运行的因素很多,如机械因素、道路因素、人为因素等等。因此,加强对车辆的安全运行检测,特别是加强对汽车关键设备参数的采集和监控,是提高汽车安全运行的重要途径。但是,通过对目前文献的检索发现,针对车辆运行实时数据的采集中,大部分集中在对车辆的速度、温度、进气压力等进行采集。如梁浩(2018)在其发表的文章中,则通过CAN总线技术完成对温度、速度等基本车辆参数的采集;马伟(2015)则采用LabVIEW对电动汽车的电池数据进行采集。通过以上的文献看出,目前针对汽车车辆运行参数的采集中,只是对其运行的基本数据进行了采集,而没有对汽车运行的姿态、导航等参数进行采集。对此,在上述研究基础上,本文以客运车辆为例,提出一种专门采集车辆姿态参数的采集系统,并对其实现进行了详细的设计。
1 系统设计目的与需求分析
本文所设计的车辆运行数据实时采集系统主要致力于对汽车运行基本参数、姿态参数以及导航参数进行采集,以此对车辆安全适应性进行深度的评估。由此,本文构建的系统其主要有以下几方面的需求:
(1) 采集系统能够对车辆运行过程中的各项数据进行检测,包括车辆行驶速度、三轴加速度、横摆角速度等,并且系统所检测到的频率不能够低于20 Hz;
(2) 采集系统除了需具备数据采集与提取功能以外,还需具备数据实时存储、数据表格生成以及匹配道路线形信息等功能;
(3) 整个系统在设计过程中应以模块化思想为前提,系统应具备较高的易集成性;
(4) 需对整体设计成本进行控制,不得超过系统实际应用价值。
2 总体方案设计
根据上述的需求,本文将系统整体架构方案设计为如图1所示。

图1 系统总体框架
该整体方案中,系统主要由采集端、CAN通信、PC端,其中采集端又包含视频参数采集、导航参数采集、基本参数采集和姿态参数采集。
在图1的姿态采集方案中,姿态特征参数的可靠性与准确性主要取决于陀螺仪及加速度计等惯性器件输出参数的精度,并且对车辆运行数据实时采集系统稳定整体性能起到极大的控制与影响作用。因此,为提高采集测量的精度,首先确定了车辆的各角度范围,其中,车辆俯仰角、横滚角以及航向角测量范围控制在±90°;测量精度控制在±0.2°。导航系统则选择GPS/INS组合导航系统。同时,在采集后数据的传输方面,基本参数采集后的传输采用CAN总线技术;视频参数的采集采用Net;姿态参数采集采用I2C,而姿态参数与电脑的通信,则采用串口通信模式。
3 采集功能设计
3.1 功能结构
根据上述的需求分析,以及结合车辆运行数据采集系统构建的相关原则,本文将该系统的整体结构设计为如图2所示。

图2 系统总体架构设计
在该电路模块中,具体是对包括速度、油门大小、踏板、方向盘转角、加速度等进行详细的采集。
通过图2看出,本文将整体整个采集系统分为两个部分:数据采集与传输、数据存储与处理。同时在对系统结构的搭建中,按照模块化设计的思想,将不同类型的参数采集按照不同的模块进行采集。因此,上述的两个部分可以归纳为硬件部分设计和软件部分设计。同时,由于本文采用的是GPS/INS组合导航,所以姿态参数模块和导航参数模块是相互联系的。由此,在开展车辆运行数据实时采集系统的硬件电路设计时,必须对姿态参数模块与导航参数模块之间后期的融合进行考虑。另外为了使系统后期数据处理能够获取到道路性数据和视频参数,在系统的硬件电路部分设计时,需预留对应的硬件接口。
3.2 各功能模块具体业务
① 方向盘转角接受模块
该模块主要作用于对车辆运行方向盘转动角度进行采集,这两大模块之间借助无线通信方式取得联系。
② 车辆运行基本参数模块
该模块中包含车辆多种状态下的参数状态,具体包括车辆运行速度、踏板、刹车等。车辆运行基本参数采集模块主要负责对车辆运行基本参数以及车辆方向盘转角进行采集。在完成数据采集工作之后,将借助CAN总线将各节点中传感器采集参数上传至系统采集板中,便于系统上位机部分通信与存储。
③ 姿态参数采集模块
该模块主要包括三轴加速度、三轴陀螺仪等传感器,主要通过I2C总线与ARM处理器之间进行通信,系统与上位机之间的数据传输则借助串口进行实现。
4 系统详细设计
4.1 硬件选择
4.1.1 陀螺仪和惯性加速度计
在本文中,结合市场中的有关陀螺仪和惯性加速度的产品,选择Sensonor公司生产的高性能传感器STIM300,如图3所示。

图3 STIM300
该型号中集成了惯性加速度计和陀螺仪的功能,具体参数见表1所示。
4.1.2 GPS定位装置
对GPS的选择,主要是依据定位精度。定位精度的计算见如式(1)。
CEP=vtsin(Δθ)
(1)
其中,CEP表示定位精度;v表示物体的运动速度;Δθ表示偏移姿态角度。
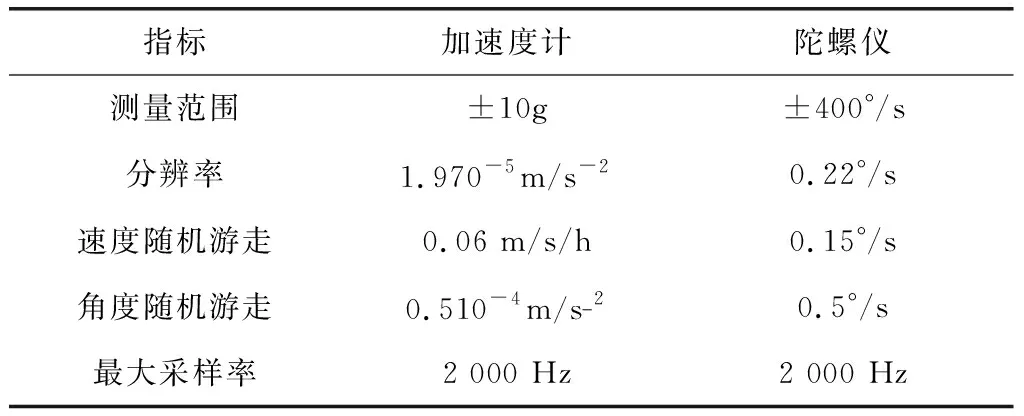
表1 STIM300技术参数
而根据精度的要求,本文则选择Trimble BD982定位装置。之所以选择该型号的装置,是因为该装置可实现长时间的定位。
4.2 硬件电路设计
依据上述的硬件选型,本文主要对采集模块进行设计,包含模拟量采集电路、频率量采集和开关量采集模块等,以此对车辆在运行过程中的基本参数与姿态参数进行采集,并通过GPS秒脉冲时钟对所有数据时间进行同步。
4.2.1 模拟量采集电路
在模拟量采集电路模块,将通过时间及数值连续变化的物理量对模拟量进行定义。在开展非电量的测量、处理以及控制工作之前,还需对非电量信号进行转换,使其由非电量信号转换为模拟电信号。标准的模拟点压信号与模拟电路信号应为0-10 V及4-20 mA。在本文中,选择LM324完成对信号的放大。具体电路如图4所示。

图4 模拟量采集电路
在模拟量采集电路中,检测端与检测电路输入端之间保持连接关系,检测信号在经过LM324之后将被放大,并与CPU中ADC通道进行连接,以此达到非电量量化与检测的目的。
4.2.2 开关量采集电路
开关量主要是指控制继电器在接通状态以及断开状态时所对应的值,也就是数值“1”与“0”。除此之外,开关量也被视为非连续信号的采集与输出。在实际生活中对汽车某些特定器件状态进行描述时,主要通过开关量对其状态进行记录。其中,汽车车灯与车门等器件仅有两种状态量,这些器件通常皆采用开关量对其状态进行记录。因此,本文将开关量采集电路设计为如图5所示。

图5 开关量采集电路
4.2.3 频率量采集电路
频率量测量是借助传感器对物理量进行转换,将原本具备周期变化特性的物理量变为电信号,再利用电子频率计获取到工频、声频及振动频率等。当前,在频率量测量领域中主要具备3种测量法,分别为无源测频法、有源测频法以及电子计数法。本文在对这三种方法进行研究后,选取电子技术法进行频率量测量。电子计数法又包括测频率法以及测周期法两种。其中,测频率法主要是对被测信号脉冲进行计数,通常用作于高频信号的测量工作中;侧周期法主要是对某一周期内某一基准时钟脉冲进行计数,通常被应用至较低频率信号的测量工作中。考虑到本文所采集的车辆信号属于低频率信号,本文采用电子计数法中的测频率法开展频率量测量。具体频率量采集电路如图6所示。
5 软件部分设计
在软件设计部分,本文采用uCLinux系统。同时,重点就数据传输、系统主程序等进行设计。
5.1 系统主程序设计
在系统运行中,主要对各个模块进行初始化,将采集到的数据上传到上机位处理。具体流程则设计如图7所示。
在主程序启动中,首先对各个模块进行初始化,然后将传感器采集到的数据存储,并通过导航解算方法,定位采集数据的坐标,最后将数据输出。
5.2 数据传输
在数据传输模块,本系统采用串口与上位机进行数据传输。具体串口程序软件流程如图8所示。
6 车辆采集界面实现
在本文的开发中,是以STM32作为主要的开发板,所以在开发前需要搭建Linux系统,同时安装GNU工具包,从而实现对系统的开发。同时以某客运车辆为例,经采集得到的数据采集界面如如图9所示。

图6 频率量采集电路

图7 系统主程序设计
通过上述的界面图线,展示了不同采集参数的状态值,进而通过这些状态值,可及时了解当前车辆运行的情况。如通过黄色的曲线,可清晰的看出车辆在不同时间的加速度大小,当加速度较大的情况下,说明车辆在加速,并且变化较大。

图8 串口程序软件流程

图9 车辆数据采集界面
7 总结
通过上述的设计看出,本文构建的专门用于汽车运行参数采集的系统,可全面采集汽车的各项运行参数,从而通过这种参数的采集,保障系统安全运行提供了借鉴。但本文在接下来的工作中,还需要重点就车辆的导航坐标变换进行研究,以提高测量的准确度。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
电脑爱好者(2021年12期)2021-06-22
天天爱科学(2020年6期)2020-09-10
学生天地(2020年3期)2020-08-25
电子制作(2019年24期)2019-02-23
汽车观察(2018年9期)2018-10-23
电子制作(2018年17期)2018-09-28
理科考试研究·初中(2017年4期)2017-11-04
探索科学(2017年4期)2017-05-04
哈尔滨理工大学学报(2016年2期)2016-09-12
