
锰矿智能视频监控的运动目标检测技术探讨
2019-08-02 03:00李艳红
微型电脑应用 2019年7期
李艳红
(西安外事学院 工学院, 西安 710077)
0 引言
锰矿开采安全环境的构建直接关系着企业的正常运营,利用高科技手段解决传统意义上各种瓶颈问题已经成为相关研究人员的主要方式,利用视频监控技术,实现对动态目标检测来解决对矿藏生产过程中人员管理、安全预警等问题。
自动视觉检测、追踪和计算可变数量的物体是矿藏开采过程中的关键安全和管理手段,构建满足该技术条件的系统架构,需要专用切昂贵的硬件设备、复杂的安装流程以及专业化人员的实时监督。国内外相关的研究人员开发了基于各种条件的自动检测和跟踪算法,以尽量减少监督的必要性。文献[1]中采用基于背景减法技术的移动物体检测器,该手段通常不需要训练阶段,也不需要复杂的系统参数设置;然而,文献[2]中提出由于虚警,噪声检测,缺失检测以及分裂和合并检测等缺点使跟踪阶段变得复杂。另外,检测和跟踪对象之间的对应关系是未知的,为了解决这些问题,已经提出了不同的数据关联技术。在文献[3]中采用了使用重叠标准来简化虚拟检测生成的策略。在文献[4]中,引入了一个模拟分裂和合并检测的概率模型,该模型使用马尔科夫链蒙特卡罗方法(Markov Chain Monte Carlo Method ,MCMC)来计算批处理过程中的关联假设。以上所提出的解决策略的主要问题在于它们的计算成本很高,因此需要专用且昂贵的硬件才能实时工作。文献[5]使用关于场景几何的先验信息,例如地板位置和摄像机校准来限制数据关联和跟踪问题,然而,该方法使系统安装和设置变得更加复杂。
本文提出了一种自动视觉对象检测和跟踪框架,以可靠地将视频监视和基于计数的应用引入到实际的企业管理中。该框架基于现成的设备,如IP网络、网络摄像机和PC,不需要特殊的安装和配置要求;检测阶段基于参数背景减法技术,该技术检测输入视频流中的移动区域;后处理阶段通过估计和拟合代表移动物体到上一组移动区域的一组椭圆来改进检测。跟踪阶段使用贝叶斯模型来模拟对象轨迹,为了得到改目的,使用粒子滤波技术来预测表示最可能的对象位置的一组假设。使用似然函数来验证这些假设,从而完成对目标真实值得评估,因此,可以大大节省计算成本。此外,似然函数的设计也是为了解决嘈杂、错误和遗漏的检测问题,为该算法的框图如图1所示。

图1 算法执行框图
1 移动目标探测技术研究
移动物体的检测是基于混合的高斯背景减法技术,该技术执行场景背景的在线学习;学习的背景被用于通过检测与背景模型不兼容的图像区域来估计移动对象。背景使用高斯混合来逐个像素建模,这种移动物体探测方法具有检测和去除阴影的能力[6-8]。
移动目标探测技术的输出是一组独立的图像区域,理想情况下与移动物体具有一一对应关系。然而,采用同样任何其他背景减法技术,所得到的移动物体检测可以包含两个或更多区域,而实际的目标检测仅对应于一个物体,该类方式被称为是分裂检测;此外,可包含与两个或更多对象相对应的区域,称为合并检测。对于分裂和合并检测,是的轨迹估计和对象计数在实际应用中具有较大的技术挑战,井上目标视频监控图像分析结果图如图2所示。
本文所提的方法通过将一组椭圆拟合到背景减法算法的输出来解决之前的分裂和合并检测的问题,定义使得每个椭圆表示独立的对象。一个椭圆可以包含前景检测的一个或多个独立移动区域,用于诊断分割检测;另一方面,前景的移动区域可以与两个或更多个椭圆相关联,用于解决合并检测和对象遮挡等问题。
将椭圆拟合到前景检测的过程通过结合期望最大化算法来估计椭圆及其参数的数量。通过该算法可实现两个目标:第一个是将每个对象的椭圆数量限制为1,因为原始算法使用连接椭圆的分层集合来表示对象轮廓;第二个是根据可能的物体尺寸和方向的预定范围来帮助估计限制它们的值的椭圆参数。此外,前两次适应降低了拟合过程的复杂性,使算法更适合实现实时限制。采用该方式进行的先前运动区域检测的椭圆拟合过程图如图3所示。

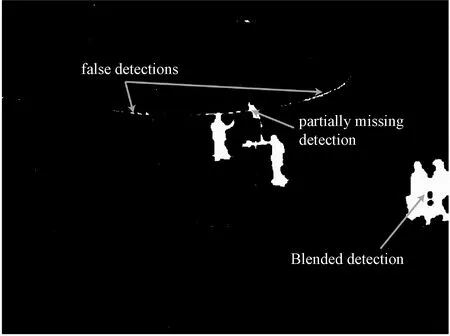
图2 区域检测图

图3 区域检测的椭圆拟合过程图
1.1 贝叶斯追踪模型
采用向量状态符号表示有关移动对象的跟踪信息,如式(1)。
xt=[xt,n|n=1,…,N0]
(1)
其中N0表示在时间t内移动对象的数量,xt,n表示第n个移动对象的目标信息,其定义如式(2)。
xt,n=[r,v,e]t,n
(2)
其中r,v,e分别包含对象的位置,速度和椭圆边界。对象的位置和速度通过相对于图像平面进行表示。如物体占据的图像区域近似为椭圆,其椭圆集合中心为rt,n,其余参数(长轴、短轴及方向)存储在et,n中。
使用贝叶斯方法定义状态向量xt,该方法通过后验概率密度函数(Probability Density Function,PDF)计算状态向量,定义如式(3)。
z1,t=[z1,zt]
(3)
在每个时间步中,zt代表移动物体检测阶段获得的一组物体测量值。后验PDF可以使用贝叶斯定理递归表示。如式(4)。
(4)
其中p(xt|z1:t-1)是先验概率,p(zt|xt)为概率,p(zt|z1:t-1)只是一个归一化因子。先验概率根据动态模型将运动物体进行时空演化,它可以被认为是对移动物体当前状态的预测,用式(5)。
(5)
其中p(xt-1|z1:t-1)是前一时间戳的后验概率,p(xt|xt-1)是将物体动力学模拟为具有高斯不确定性的恒定速度模型的转移概率,其定义如式(6)所示。
p(xt|xt-1)=N(xt;Axt-1,∑x)
(6)
其中N(x;μ,σ)为多元高斯函数,A是对恒速模型进行编码的矩阵,∑x是表示物体动力学不确定性的协方差矩阵。
似然项使用当前时间步zt处的测量来估计最可能的对象配置。目标可能性的计算需要估计对象与测量之间的关联,以正确更新每个对象的跟踪信息。为了有效地完成这项任务,基于计算物体和测量之间的最佳区域重叠,本文提出了一种新颖的数据关联:即对象相对应的椭圆集合与对应于测量的椭圆集合之间的重叠越大,潜在状态向量的可能性即越高,其中重叠区域由测量和检测的所有椭圆区域的并集表示,如式(7)。

(7)
其中Nd是测量对象的数量,Im是通过与该测量关联的椭圆内的1到第m个像素转换成的二进制数,并且In是通过将与第n个对象相关联的椭圆内的那些像素设置为1而形成的二进制。
使用这种重叠测量,通过高斯函数表示目标识别可能性,该高斯函数比较重叠和所有测量的总面积之间的面积如式(8)。
(8)
其中Cd是用于计算组成图像区域的像素数量的基数函数,∑z是协方差矩阵,用来表示与区域重叠过程有关的不确定性。
1.2 目标对象的输入/输出
由于场景中物体的输入和输出,状态矢量xt的大小可能随时间而变化。新物体的入口与不与任何现有的被跟踪物体重叠的测量相关联,这种模糊性由二项式分布建模,该分布估计在给定不与任何对象重叠的一组测量值的情况下,在N个新对象已进入场景中的概率。二项式分布的参数根据预期的假警报的数量来设置,通常是取决于场景特征和对象检测器的系统参数。
离开场景的对象的估计与任何现有测量重叠的对象的数量有关。然而该情况下,检测系统可能只是无法检测到这些物体,通过Gamma分布用于模拟这种模糊性。
1.3 实验模拟
本文使用数据集PETS2006和PETS2010的序列对移动物体的视觉检测进行了测试。这两个数据集的序列通过多个相机采用不同的角度进行获取,其中PETS2006的序列为井下探测情况,而PETS2010的序列为井上情况。
在实验的第一阶段通过井下人数的识别评估了所提出框架的性能;第二阶段对所提出的框架和文献[9]中所提出的方法获得的跟踪结果进行了比较,与文献[9]中所提出的方法的相关点是:移动物体的检测单元不包括用于去除阴影的阶段,也不包括用于将椭圆(表示真实物体)拟合到获得的移动区域的后处理阶段;跟踪是基于确定性方法达到更接近模式,不能管理对应于不同模式的不同假设。
如图4所示。
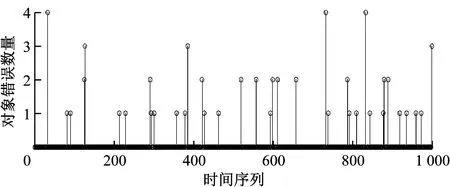
图4 计数误差随时间的分布图
为PETS2006数据集序列“S1-T1-C”(摄像机编号3)的前1000帧的计数误差随时间的分布图,顺序上错误的数量仍然很低。
如表1所示。
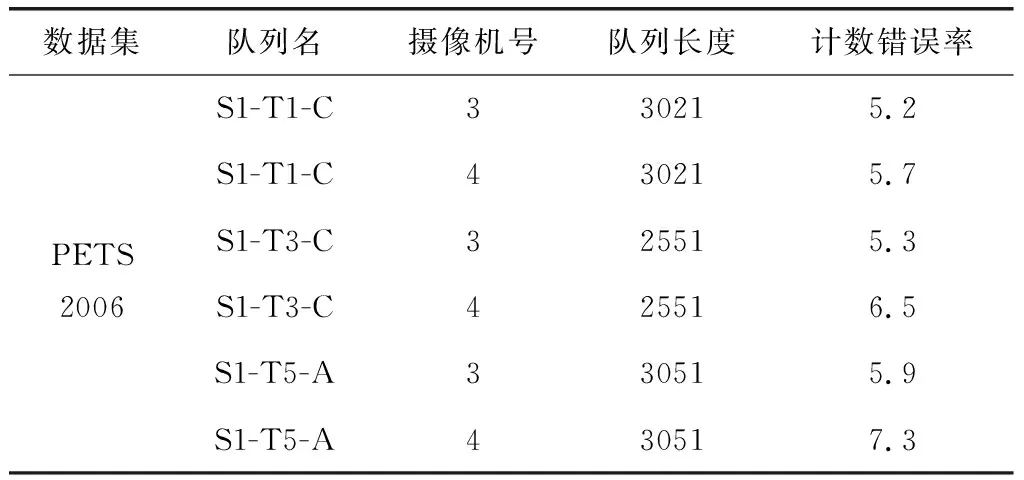
表1 对象计数性能表
为使用数据集PETS2006的几个序列提供了全局对象计数结果,结果表示为整个序列中计数错误的百分比。 正如可以观察到的那样,尽管使用的物体检测器与文献中可用的其他物体相比较简单,但所提出的算法具有很高的准确性。
如表2所示。
为采用文献[9]中所提出的检测方法进行检测的结果记录表,两种检测方法均运行在四核2.53 GHz CPU计算机上,结果表明本文所提出的算法相比文献[9]中的算法在移动对象识别率上有较大的优势。

表2 对象计数性能表
2 总结
本文提出了一种基于矿藏开发过程中使用的监视和计数应用的视觉检测和追踪框架,通过应用现有的硬件设备,采用较为简单的安装配置手段,以及无监督的运行环境。通过该手段将处理分裂和合并检测的移动检测算法和可以处理多模式分布(错误检测和缺失检测)的新贝叶斯跟踪模型相结合,通过实验证明该方法与文献[9]中所提出的一种典型的移动目标识别手段由较高的性能优势。
猜你喜欢
数学杂志(2022年5期)2022-12-02
廉政瞭望·下半月(2021年5期)2021-07-20
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
中等数学(2020年8期)2020-11-26
小学生学习指导(低年级)(2020年4期)2020-06-02
新教育论坛(2019年14期)2019-09-10
数学大王·低年级(2019年8期)2019-08-27
意林(2018年3期)2018-03-02
福建中学数学(2016年4期)2016-10-19
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
