
应用STL模型的敏感器视场遮挡区域分析方法
2019-07-31 08:05王裕夫裴胜伟黄华
航天器工程 2019年3期
王裕夫 裴胜伟 黄华
(中国空间技术研究院通信卫星事业部,北京 100094)
随着卫星有效载荷技术的发展,卫星星表的产品越来越多,体积越来越大。特别是某些产品部件,例如可展开天线,在卫星发射时收拢在卫星舱板上,在轨时展开。展开后可能会对敏感器的视场造成遮挡。遮挡使敏感器视场减小,影响其正常工作,导致整星的姿态确定受到影响[1-3],为了在卫星设计初期综合考虑整星的布局以及相应产品部件的结构形式,有必要研究星上产品部件对敏感器视场的遮挡问题。
针对卫星上的遮挡分析,文献[4]采用计算机软件SolidWorks,来分析遮挡物对敏感器视场的遮挡情况。文献[5]提出一种用于轴对称形状组合体航天器的帆板遮挡分析方法。文献[6]采用图像检测的方法分析了航天器太阳翼遮挡的情况。以上文献中,遮挡分析主要是采用几何分析,分析方法需要对位置关系以及遮挡部件单独建模,遇到涉及转动或者复杂的遮挡部件,人工操作工作量大,效率低,在定量给出敏感器视场所受遮挡的具体范围及遮挡率方面存在一定困难。
本文将遮挡部件的三维模型转化为STL网格化数据(STL是美国3D System公司1988年开发的用于快速成型制造技术的表面模型数据交换标准[7-8]。),然后对遮挡部件的STL网格化坐标数据进行处理后,与敏感器视场范围均转换成平面夹角数据,将部件的遮挡问题转化为判断网格坐标点位置范围的问题。STL网格化数据可以直接从实际部件的三维模型得到,包含了分析遮挡所需的全部几何数据,无其它冗余信息。采用STL网格化数据后,可以适应星上所有产品遮挡敏感器视场的分析,在对各种布局情况分析时,可以避免以往分析方法的反复、复杂建模过程,显著提高工作效率,便于进行工程设计,可有效的应用于敏感器视场遮挡分析。
1 视场遮挡区域分析
本文提出的遮挡分析方法主要由3部分组成:数据提取、数据处理、数据分析。如图1所示。其中,数据提取部分是将遮挡部件的三维模型转化为STL网格化模型文件,并提取出遮挡部件的STL网格化数据;数据处理部分是将遮挡部件的STL网格化坐标数据进行处理后,与敏感器视场范围均转换成平面夹角数据;数据分析部分则是将遮挡部件的平面夹角数据与敏感器视场范围的平面夹角数据进行对比,分析敏感器视场被部件遮挡的情况,并绘制敏感器视场遮挡图,计算遮挡率。
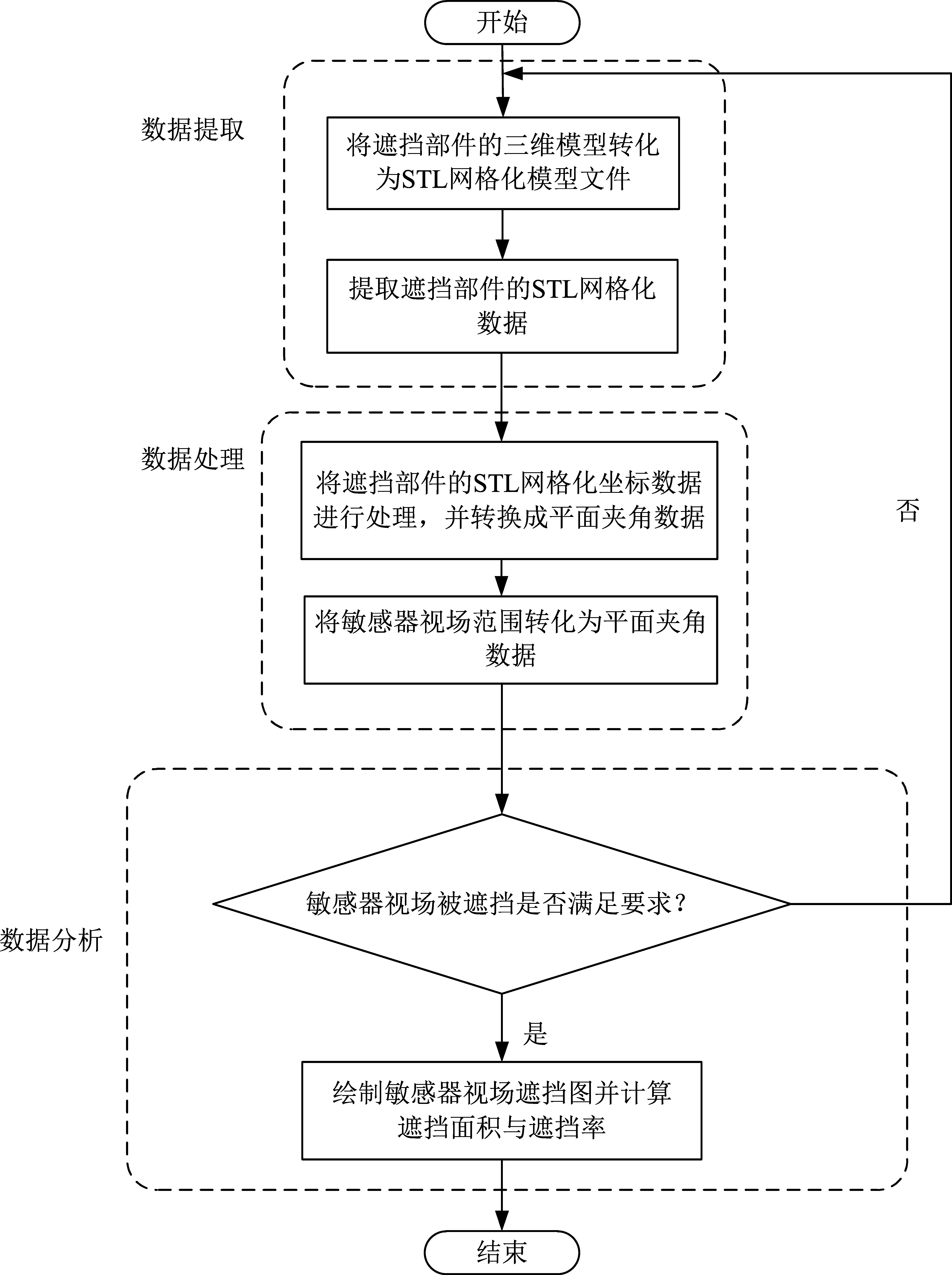
图1 敏感器视场遮挡分析流程图Fig.1 Flow chart of the occlusion analysis of optical sensor
1.1 数据提取
1)STL简介
目前,CATIA、Pro/E等三维建模软件均能输出以STL表示的三维实体模型,该模型是利用空间三角形的拼接来对原有三维模型表面进行逼近的数学模型,每个三角形用3个顶点来表示,每个顶点采用(x,y,z)来定位。另外,STL数据中还包含每个三角形的法向矢量数据。STL文件的美国信息交换标准代码(American Standard Code for Information Interchange,ASCII)格式数据如下:
solid STL文件开始
facet normalxyz三角形开始,三角形法向矢量
outer loop
vertexx1y1z1三角形第一点坐标
vertexx2y2z2三角形第二点坐标
vertexx3y3z3三角形第三点坐标
endloop
endfacet 三角形结束
各个三角形信息
endsolid STL 文件结束
上述数据格式中,x、y、z反映了三角形法向矢量与基准坐标系(生成STL时选择的坐标系)3个坐标轴的夹角。x1、y1、z1、x2、y2、z2、x3、y3、z3分别为三角形三个顶点在基准坐标系下的坐标值。详见图2所示。
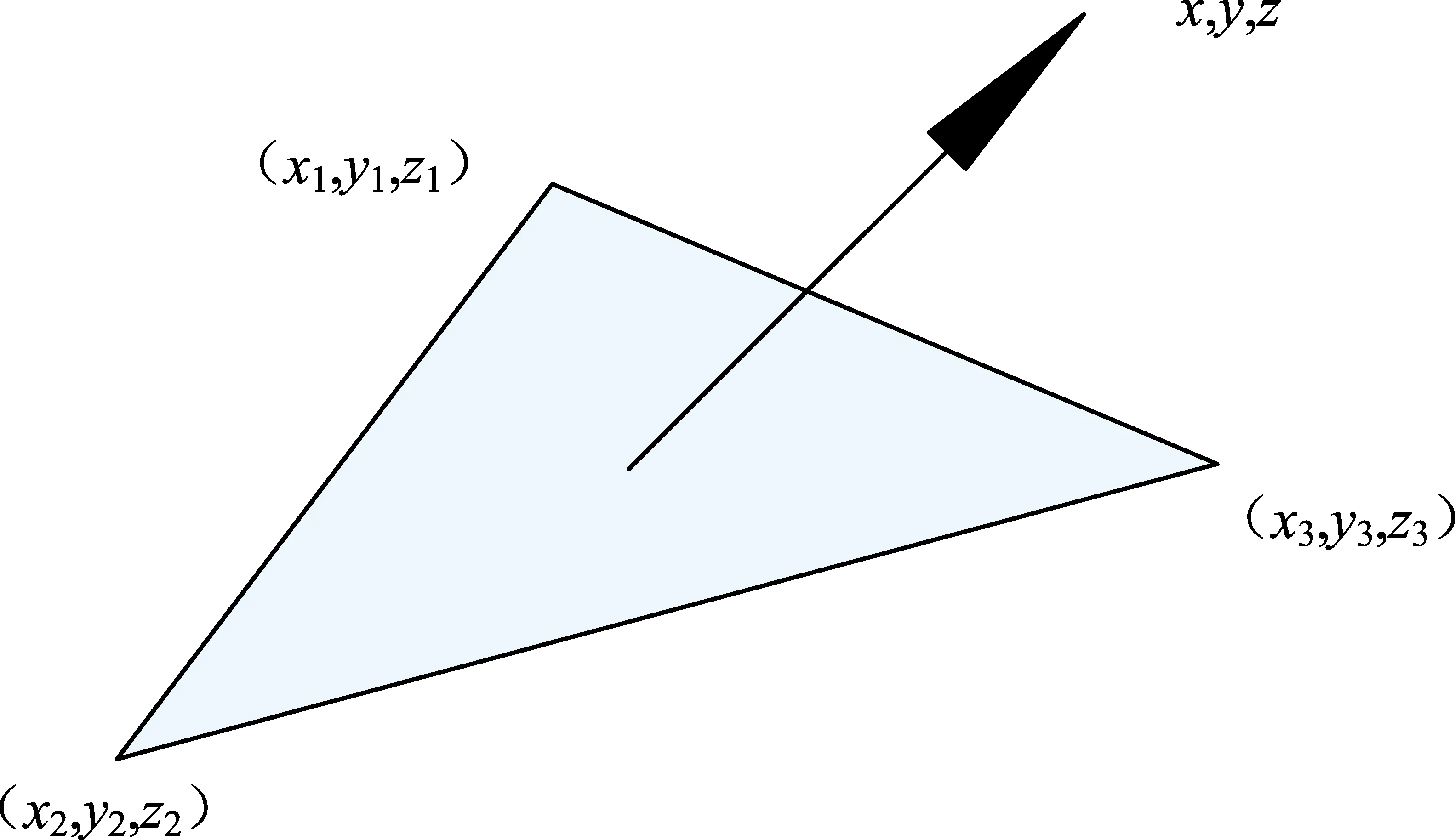
图2 STL数据中的三角形网格示意Fig.2 Triangle mesh of STL data
2)遮挡部件的STL网格化数据提取
为考虑卫星上真实的遮挡部件和敏感器视场的实际情况,采取的方法为:由遮挡部件的三维模型提取STL网格化数据。后文的模型均假定遮挡部件的三维模型与卫星上实际应用产品一致。
在三维模型中,选取敏感器视场的坐标系作为参考坐标系,这样生成的STL网格化数据中的矢量和位置信息均相对于敏感器视场。提取得到的遮挡部件的STL网格化模型文件中三角形网格顶点的位置信息,将顶点i的位置信息以直角坐标系的坐标形式存为(xi,yi,zi),其中i为1~n,n为所有顶点的总数。
1.2 数据处理
首先,将数据提取得到的所有遮挡部件的三角形网格顶点i的坐标(xi,yi,zi)利用公式
(1)
(2)
转换成遮挡部件的三角形网格顶点i与敏感器视场中心点O的连线与xz平面的夹角αi和遮挡部件的三角形网格顶点i与敏感器中心点O的连线在xz平面的投影线段与x轴的夹角βi,将所有顶点对应的夹角以平面坐标的形式存为(αi,βi),得到遮挡部件的平面夹角数据;所述的(x0,y0,z0)为敏感器中心点坐标。敏感器视场示意图见图3。
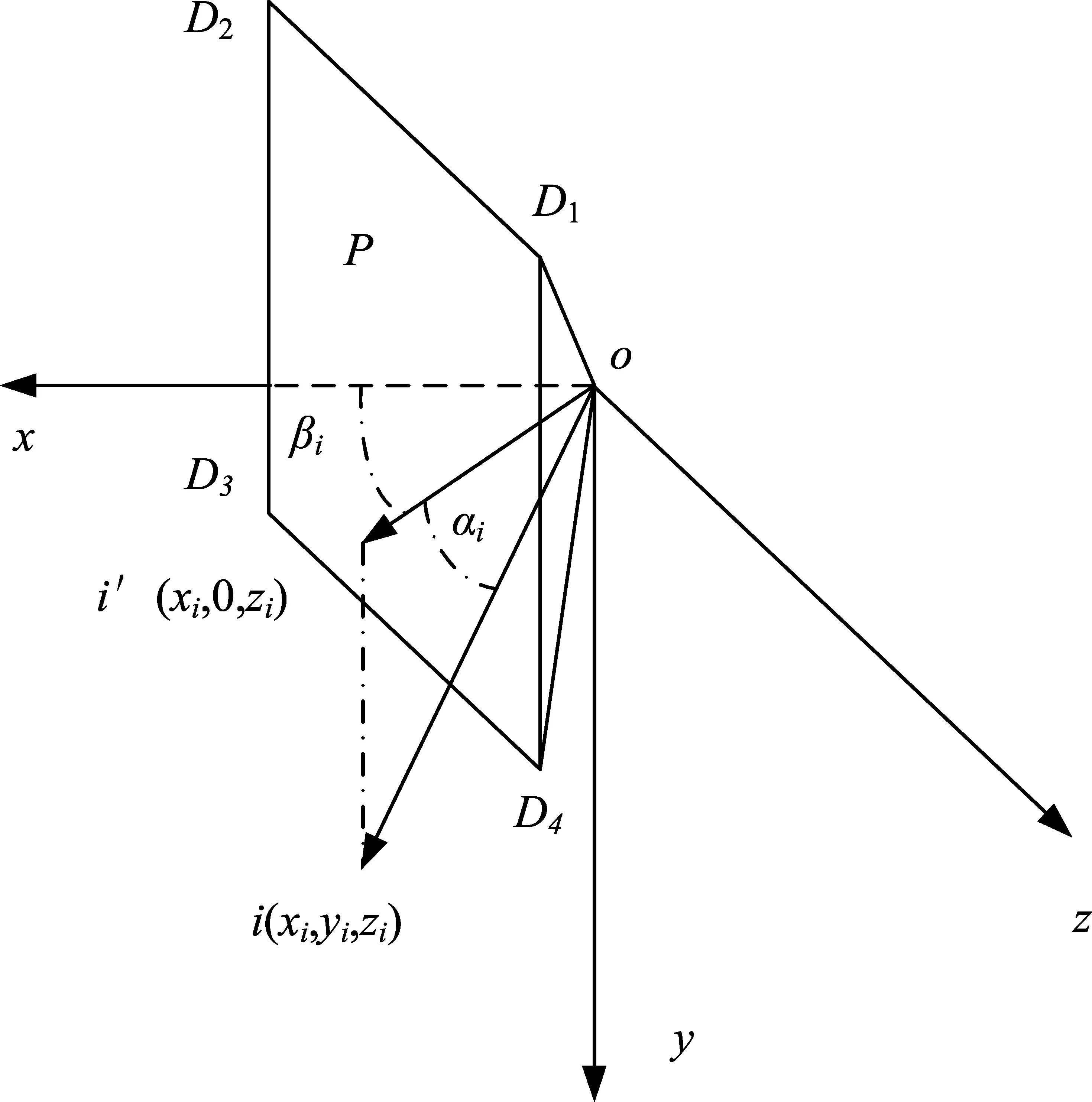
图3 敏感器视场示意图Fig.3 View field of optical sensor

以上数据处理及遮挡图绘制利用自编程序快速实现。
2 计算应用
设定某遮挡部件以及敏感器视场参数后,在三维建模软件中完成三维模型的建模,遮挡部件进入敏感器视场锥域,对敏感器视场产生了遮挡,如图4所示。然后按照图1所示流程分析敏感器视场所受遮挡的情况。根据图1所示流程,在分析敏感器视场遮挡区域时需要3个输入条件:遮挡部件的STL网格化数据、敏感器视场范围以及遮挡部件与敏感器之间的相互位置关系。

图4 遮挡部件对敏感器视场的三维遮挡示意图Fig.4 3D Pictures of the occlusion view field
以有效视场为±60°×±60°的某敏感器受某部
件遮挡为例进行计算分析。计算得出遮挡率K为17.83%,其视场遮挡图如图5所示,阴影区域为视场被遮挡部分,从图5中可以分析出,敏感器视场的第一象限遮挡的最严重,第二象限有少部分被遮挡,第三、四象限则未被遮挡。这种情况下,敏感器由于受遮挡严重,不能够正常工作。因此,对该部件与敏感器的位置关系进行优化,再次计算遮挡率K为1.02%,调整后遮挡图如图6所示。从图6中对比可以看出,位置优化后几乎无遮挡,敏感器能够正常工作。
本次优化如果采用常规方法进行二次建模分析,整个时间至少需要一个工作日,而利用本文方法进行位置优化后的视场遮挡再分析,花费工作时长不到1 h,证明本方法切实高效。
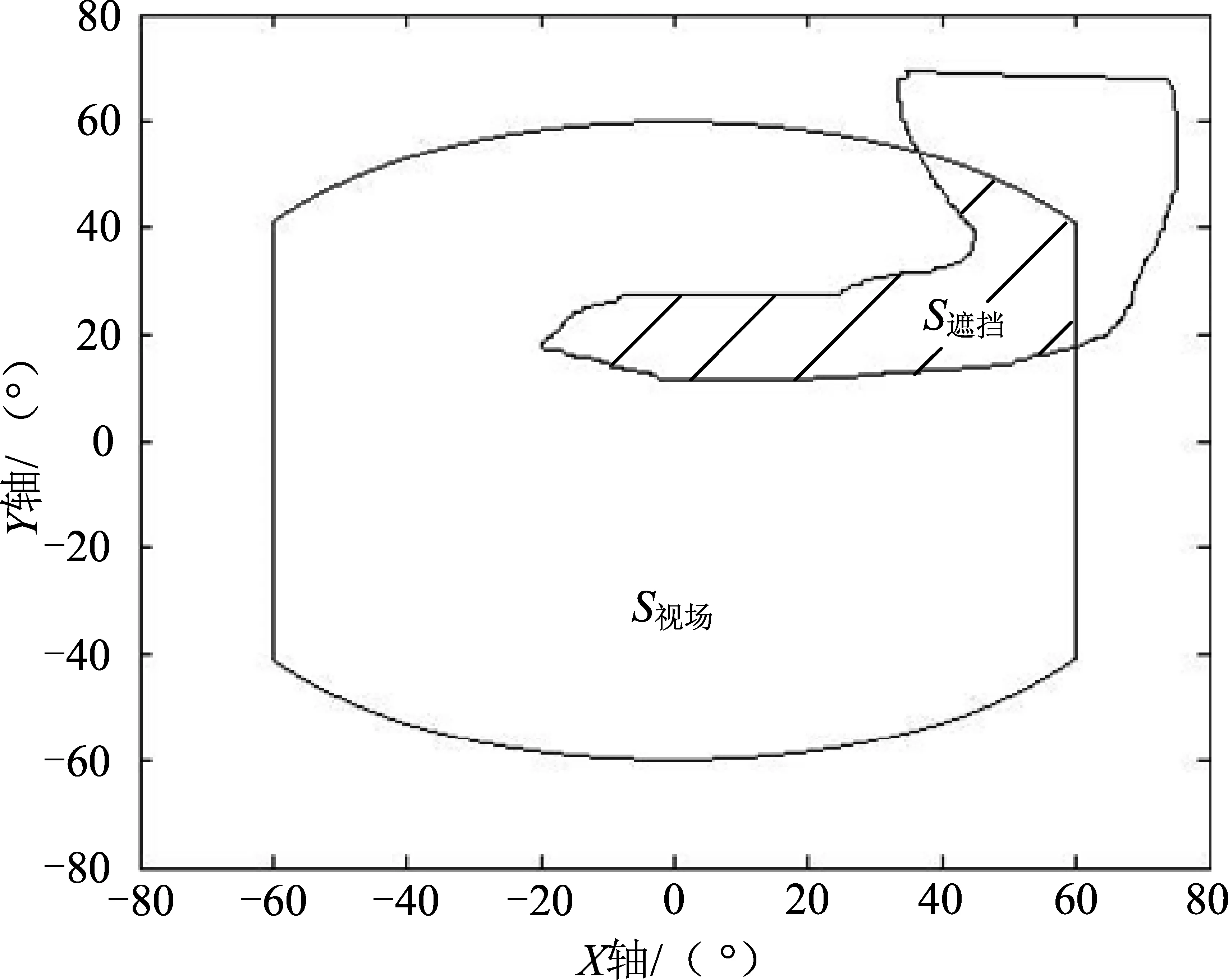
图5 遮挡部件对敏感器视场的遮挡图Fig.5 Pictures of occlusion view field
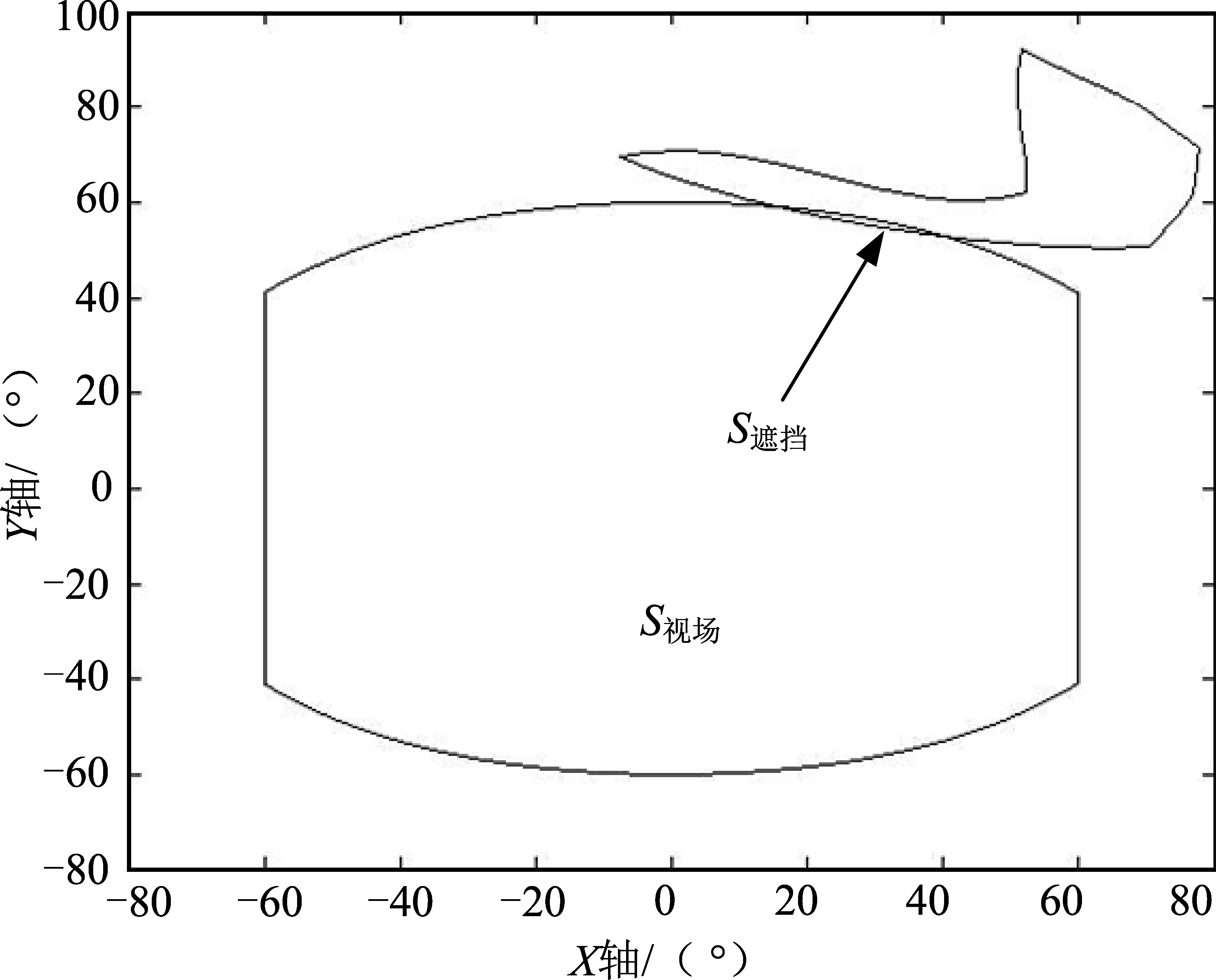
图6 遮挡部件对敏感器视场的遮挡图(优化后)Fig.6 Pictures of occlusion view field(after optimization)
3 结束语
针对卫星上的遮挡分析问题,本文提出了一种基于STL网格化模型的敏感器视场遮挡区域确定方法。对于某种静态的敏感器与遮挡部件位置状态,此方法首先是将遮挡部件的三维模型转化为STL网格化模型文件,并提取出遮挡部件的STL网格化数据。然后将遮挡部件的STL网格化坐标数据进行处理后,与敏感器视场范围均转换成平面夹角数据。之后,则将遮挡部件的平面夹角数据与敏感器视场范围的平面夹角数据进行对比,定量给出敏感器视场所受遮挡的详细分布范围以及遮挡率,相比以往方法,显著提高了工作效率,便于工程设计。针对活动部件在运动过程中的遮挡分析,可以选取运动过程中的某些典型位置进行分析,以增强本方法的适应性。可作为卫星研制工作中敏感器视场遮挡分析的有效手段。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
语数外学习·高中版上旬(2020年8期)2020-09-10
新高考·高一数学(2019年1期)2019-04-15
科学与财富(2018年28期)2018-11-16
小学生学习指导(中年级)(2018年9期)2018-09-07
中学生数理化(高中版.高一使用)(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
航空知识(2017年4期)2017-06-30
新高考·高二数学(2014年7期)2014-09-18
