基于小波变换的断路器振动信号去噪处理
2019-07-30 11:10:32黄典庆黄新波朱永灿张峻歆
广东电力 2019年7期
黄典庆,黄新波,朱永灿,张峻歆
(西安工程大学 电子信息学院,陕西 西安 710048)
断路器机械特性主要包括操作机构和传动机构的机械特性及操作机构的电气特性等,对其数据处理技术的研究和故障机理的分析是诊断和评估断路器运行状态的基础。在断路器运行过程中,电路噪声与储能电动机负荷扰动引起采集信号畸变,导致计算得到的特征参数偏离实际值,影响断路器实际运行状态的判断[1-2]。为了对高压断路器的运行状态进行准确判断,首先要求采集到的断路器机械特性信号必须精准。目前对高压断路器数据进行处理的方法主要有线性平滑法、有限长单位冲激响应(finite impulse response,FIR)滤波法[3]、中值滤波法[4]和一阶差分法等[5-7]。小波是一种能够从频域与时域两个方面对信号进行检测的方法,具有很好的频率跟踪能力,且可得到较为稳定的变换分量,因此可以有效获得信号中的基波分量。文献[8]提出基于小波变换的信号奇异性检测理论处理振动信号,得到小波变换故障特征参数的多尺度提取方法;文献[9]采用小波包和短时能量分析的方法处理振动信号,分析高压断路器合闸同期性且取得良好的效果;文献[10]将小波包能量谱与操动机构电流驱动信号相结合,分析与提取低压断路器合闸同期性特征矢量,以识别低压断路器三相不同期合闸故障。
目前常用的数据处理方法对高压断路器诊断起到一定作用,但数据处理方面的片面性给高压断路器的故障诊断和预测带来很大问题。本文采用小波去噪算法,通过小波在多分辨率下进行分解与处理,可达到分离不同频率的干扰信号、衰减扰动信号的目的。首先介绍了小波去噪算法的原理,其次将小波去噪技术应用于对断路器机械特性采集信号的去噪处理,通过搭建试验平台中的传感器获取相应的机械特性信号,最后针对数据采集过程中产生的干扰进行处理,并与未经处理信号进行对比分析,以验证本文去噪处理方法的有效性。
1 小波去噪算法
电力系统中的信号总是受到各种噪声的影响,因此在诊断之前必须首先对数据进行有效地预处理,以确保数据规律性挖掘和故障特征提取的准确性。小波变换能较好地区分信号中的突变部分和噪声,克服传统数字滤波方法处理宽带噪声明显的局限性,可在低信噪比的情况下灵活、有效地去噪并检测出有用信号,小波去噪已成为数据分析的一个重要应用领域。
1.1 小波去噪算法原理
小波去噪是指对采集到的信号经过小波分解后,能够得到幅值较小的高频信号以及幅值较大的低频信号。通过阈值函数的映射之后得到一系列的小波系数预测值,利用这些预测值进行重构进而达到去噪的目的。本文针对高压断路器动作信号特性,对小波函数进行分解,为了获得最优的频率分辨率与去噪效果,采用Daubechies6小波进行分解。
确定适用的小波函数及其分解层数n(即尺度),依次运算得到相应的尺度系数(近似部分)与小波系数(细节部分)。小波分解结构如图1所示,

图1 小波分解结构Fig.1 Wavelet decomposition structure
Y为含噪信号的离散序列,cAj与cDj分别为尺度j(j1,2,…,n)上的尺度系数与小波系数。
1.2 小波阈值的选取方法
小波去噪阈值选取的主要方法有固定阈值、自适应阈值、启发式阈值、极大和极小阈值。阈值选取具体过程为:母小波函数能够将原始信号分解为n个细节di和n个概貌ai,如果di的阈值为W,则
(1)

(2)
式中:φ(x)为尺度函数;k为实数;2x-k为多分辨分析的标准正交基;Pk为尺度系数。在小波构造中无需知道尺度函数和小波函数的具体形式而仅需知道Pk就可以进行小波分解和恢复方面的计算。
利用D.L.Donoho等提出的通用阈值公式获取的阈值λ[11]给高压断路器的故障诊断和预测带来很大的问题。进行小波包系数处理时:采用硬阈值函数降噪,易产生伪吉布斯现象[12];采用软阈值函数降噪,易造成边缘模糊等失真现象[13]。因此,针对软、硬阈值法的缺陷[14],结合分解后各频带的小波包系数的能量分布特点,构造新阈值函数为:
(3)
式中:w为小波系数值;wλ是施加阈值后的小波系数值;c为任意正常数;λ为设定的阈值。该阈值函数可通过改变c值来得到处于软、硬阈值函数之间的任何函数。阈值函数如图2所示。
2 断路器振动信号去噪过程
2.1 状态参量分析
智能变电站断路器需要监测的参数主要包括:分合闸线圈电流波形、行程、储能电动机电流、开关触头温度、SF6气体密度和压力。通过对各种监测信息的综合判断,可实现对分合闸速度、弹簧机构弹簧压缩状态、传动机构、电动机操作机构储能完成状况等的监测,并可实现越限报警。目前,高压断路器机械特性在线监测技术存在着信号传感器设计与安装问题,断路器系统故障无法定位的问题,数据处理的问题,在线监测装置模块寿命过短、价格过高的问题。针对以上问题,未来高压断路器机械特性的在线监测技术的发展趋势将是结合现代检测技术、微处理技术、在线监测模块智能化等要求,朝着集成化、通用性、高可靠性、智能型的目标发展。
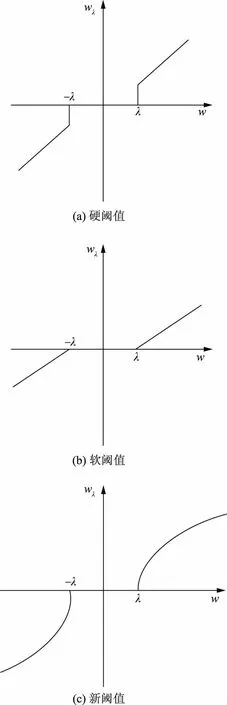
图2 阈值函数Fig.2 Threshold function
2.2 信号去噪过程
①选定一个正整数n≥2;
②选定一个多项式
P(y)=Pn(y)+ynR(1/2-y)≥0, 0≤y≤1;
(4)


(5)
图3为数据处理流程,小波去噪算法包含小波分解、对分解得到的高频系数的阈值量化处理和小波重构3个部分。采集所有通道的模拟量并确定分解层数,同时选定尺度方程与小波阈值。作为信号分解的母小波,将采集到的信号按照分解算法进行处理,滤除高频的噪声信号系数,得到有用信号,将这些有用信号进行重构,即可得到去噪处理后的信号。
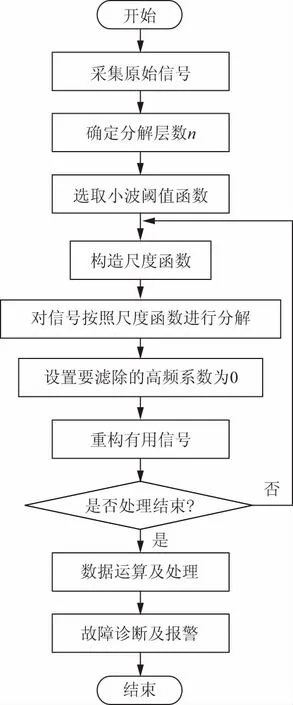
图3 数据处理流程Fig.3 Data processing flow chart
3 试验平台搭建
设计一套由信号获取、数据采集、数据处理、故障诊断模块组成的测试装置,如图4所示。信号获取模块为对应的模拟信号传感器,用来获取所需要的信号量;数据采集模块由STM32F407以及相关外围电路组成,实现数据的A/D采样流程;数据处理模块为嵌入到微控制单元(microcontroller unit,MCU)中实现的小波去噪算法,将得到的特征参量结合故障诊断算法进行分析判断,最终得到反映断路器运行状态的信息并上传至上位机进行显示报警[18]。
试验平台如图5所示。三相调压器是由3台单相调压器接成星形而组成的,其先进的数字控制技术改善了电网功率因数,有效节省用电量,可以产生直流220 V电源给高压断路器的分合闸线圈、储能电动机以及机械特性监测终端供电,正常情况下,流过分合闸线圈的电流为0.8~1.0 A。微机保护装置集成度高,体积小,重量轻,便于集中组屏安装和分散安装于开关柜上,能够控制断路器进行分合闸操作。监测终端采集断路器动作时的数据,将经过处理的信号通过CAN总线上传至上位机,从而实现对断路器状态的实时监测。
4 试验分析
4.1 小波去噪实例
采用Daubechies6小波分别对断路器动作时的分合闸线圈电流信号、三相触头分合闸行程信号进行处理,所得结果如图6—9所示。

CAN—控制器局域网络,controller area network的缩写。
图4 断路器机械特性监测终端
Fig.4 Monitoring terminal for mechanical characteristics of circuit breaker

图5 试验平台Fig.5 Test platform

图6 去噪前后分闸线圈电流信号对比Fig.6 Contrast of current signals of opening coil before and after denoising
由图6可以看出:整个分闸过程伴随着由于电源波动带来的小幅度尖峰;在29 ms处的噪声尤为明显,该噪声是分闸线圈断电瞬间对电路产生的扰动;经过处理后,该噪声能被完全滤除,曲线光滑,有利于特征点的选取。
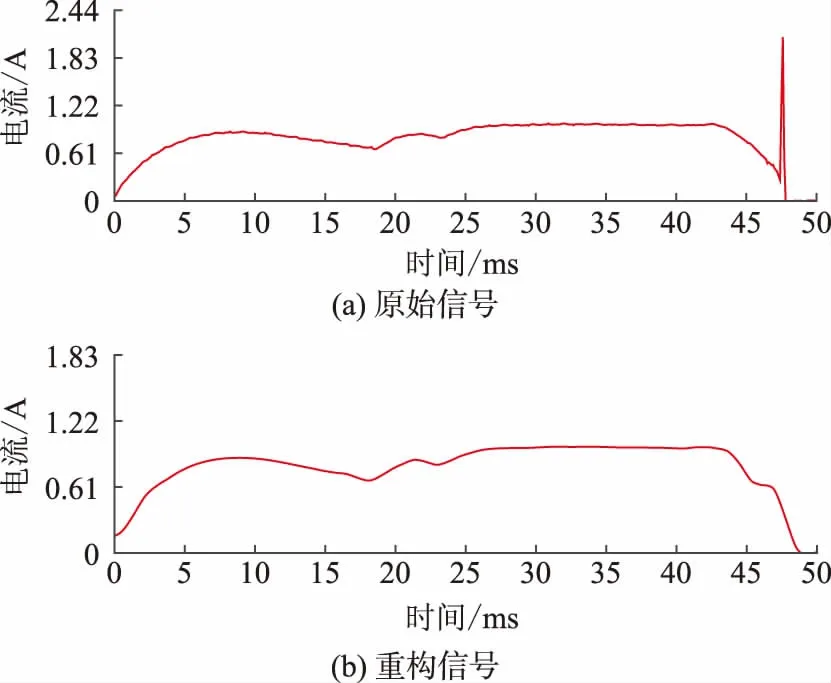
图7 去噪前后合闸线圈电流信号对比Fig. 7 Contrast of current signals of closing coil before and after denoising
由图7可以看出,在48 ms附近存在很大的信号噪声,换算所得的线圈电流信号达到2.1 A,超过给定范围。对去噪后的合闸线圈电路进行运算,得到实际的工作电流是0.6 A。若不对该噪声信号进行处理,将导致系统误报警甚至诱发断电故障。
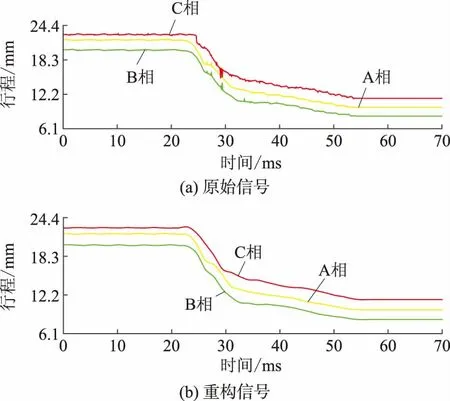
图8 去噪前后三相触头分闸行程信号对比Fig.8 Contrast of opening displacement signals of three-phase contact before and after denoising
由图8可以看出,三相触头分闸信号均在28 ms处存在不同程度的尖峰噪声,其中C相最为严重。原始信号所得的分闸最大速度达到2.45 m/s,触头的超行程是2.1 mm,不满足该型号断路器的正常运行范围,将被误判为触头机械故障。经过去噪处理后,计算所得分闸最大速度为1.11 m/s,触头超行程为3.8 mm,计算结果属于该型号断路器正常运行范围。
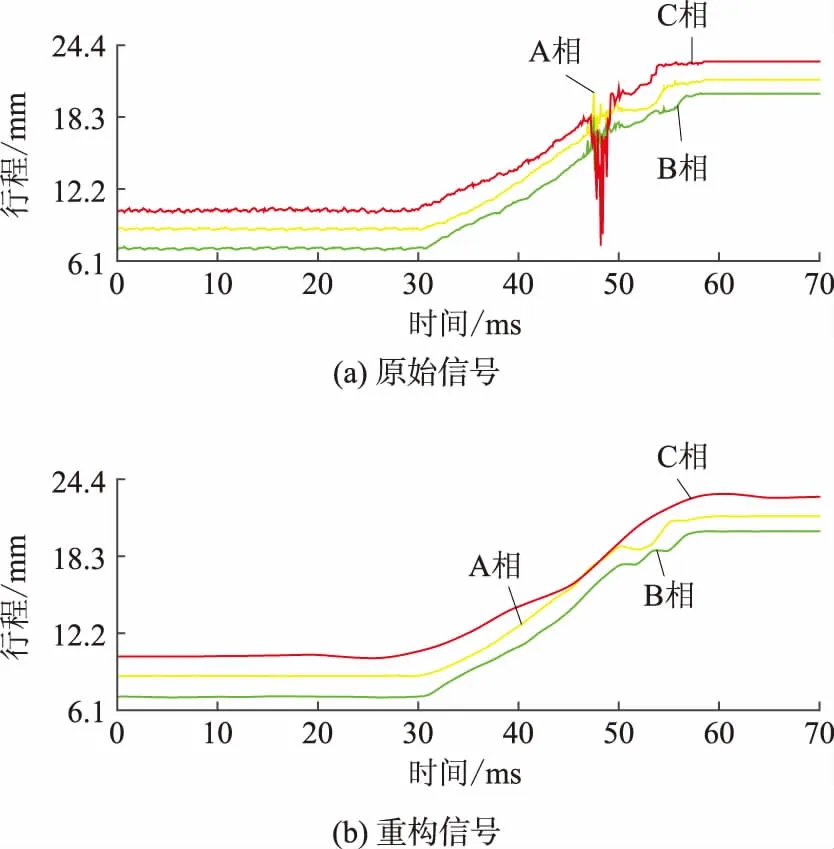
图9 去噪前后三相触头合闸行程信号对比Fig.9 Contrast of closing displacement signals of three-phase contact before and after denoising
由图9可以看出,三相触头信号均在48 ms附近存在不同程度的尖峰噪声,经过滤波处理之后的信号噪声均被滤除屏蔽,极大地改善了曲线平滑度,有利于合闸特征点的选取。信号经过处理之前,触头在48 ms左右的开距发生极大变化,不满足该型号断路器的正常运行范围,将被误判为触头机械故障。信号经过处理后,触头的开距在9.7 mm附近波动,得到的开距、超行程信号更加准确。受影响最大的合闸弹跳时间由最初的3.4 ms变为1.1 ms。合闸不同期时间由原来的3.1 ms降至0.9 ms,极大地提高了特征参数的准确性。
综合以上分析,Daubechies6小波能够滤除高频杂波,平滑波形,排除因采用干扰信号进行计算造成的系统误判和非计划停电事故,为特征参量的计算提供准确参考。
4.2 数据处理结果应用
对采集到的数据进行运算,可得到高压断路器的分合闸速度、三相不同期时间、分合闸时间、合闸弹跳时间、分闸反弹幅值等机械参数[19-20]。为了验证高压断路器特征参数的精度,对某10 kV真空户内高压断路器的各项数据进行分析。出厂参数指标见表1,原始数据、实际数据、去噪处理后数据对比见表2。
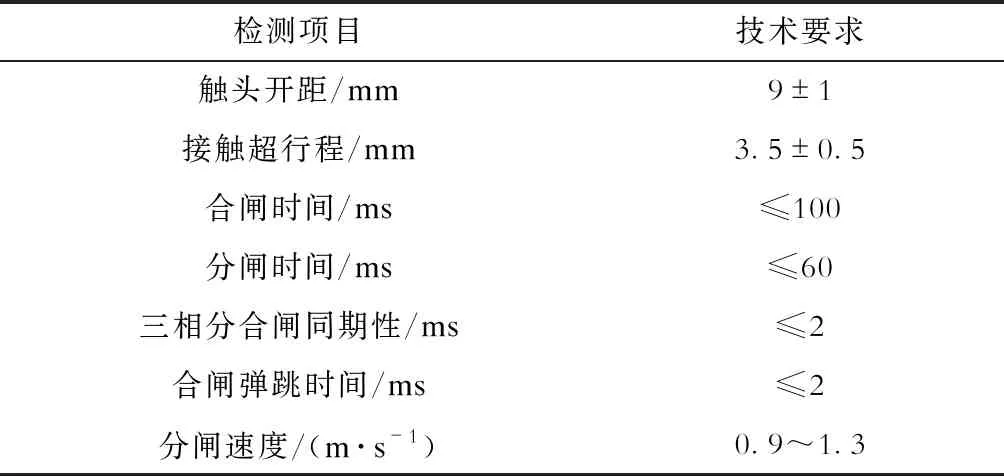
表1 出厂参数指标Tab.1 Factory parameter index
由表2可知,受噪声影响的断路器特征参数主要有触头超行程、开距、最大分合闸速度、合闸弹跳时间、分合闸不同期时间等[21-22]。由未经去噪处理的原始数据计算所得特征参数与实际数据相比,计算精度不满足实际要求,可能发生误报警甚至误动作,给电网的可靠运行带来隐患[23-25]。而由处理后数据计算得出的触头开距优化到出厂时设定的9.5 mm。通过曲线斜率计算触头分合闸平均速度与最大速度,其中三相触头的分闸合闸最大速度由于受到尖峰影响,曲线斜率发生突变,最大分闸速度达到2.45 m/s,最大合闸速度达到3.49 m/s;受到畸变信号的影响,触头合闸弹跳时间达到3.4 ms,合闸不同期时间达到3.1 ms。上述所有参数均超出了断路器正常运行的参考范围。经过处理后,曲线的毛刺被滤除,特征点选取清晰简单,计算得出的最大分合闸速度、合闸弹跳时间与合闸不同期时间均回归到正常值。同时,经过处理的数据基本稳定在实际数据小幅度变化范围之内,且经处理所得的试验数据完全满足出厂性能指标[26-27]。
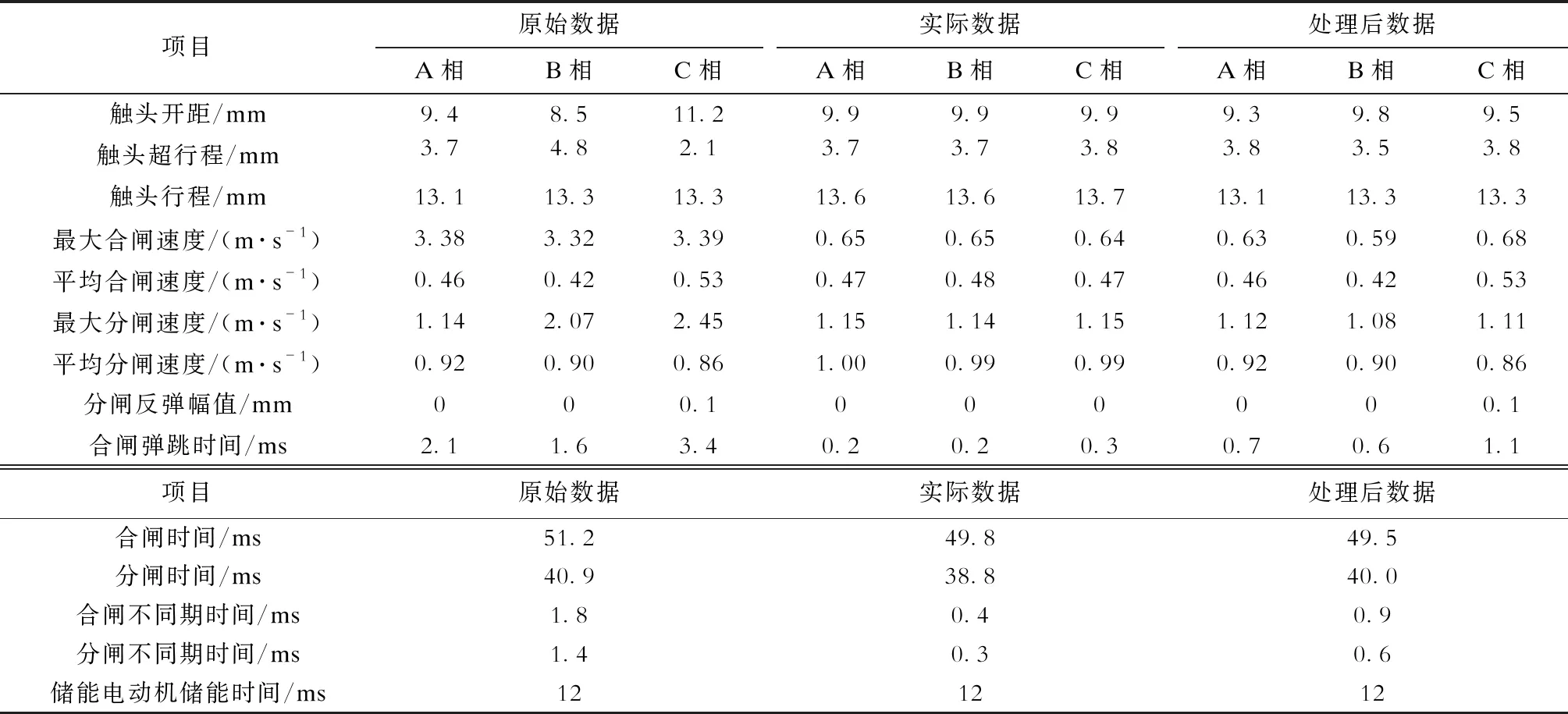
表2 原始数据、试验数据与处理后数据Tab.2 Original data, test data and processed data
5 结论
a)电动机负荷瞬时通断与电路噪声的产生,使得断路器的采集数据受到尖峰脉冲的干扰,难以准确选取特征点进行运算。本论文将各个算法的分析处理结果与运用小波算法处理得到的结果进行对比,说明利用Daubechies6小波去噪法能剔除电噪声与尖峰脉冲,可有效提取断路器动作过程的特征点,排除了因采用被干扰的信号进行计算造成的系统误判和非计划停电事故。
b)本文所搭建的断路器状态实时监测平台安装适应性良好,能够准确判断故障的发生部位,使用合理的通用性材料使得监测设备的寿命得到明显提升。
c)本文利用小波去噪算法对断路器机械特性原始信号中的噪声进行了有效剔除,与实际数据比较,所得的试验数据误差范围满足精度要求,使沉降曲线更为光滑、更有规律性,更好地反映了断路器的工作状态,具有良好的工程应用价值。
猜你喜欢
科技与创新(2022年11期)2022-06-14 01:45:56
科技风(2021年19期)2021-09-07 14:04:29
设备管理与维修(2020年23期)2021-01-04 00:15:14
电子制作(2019年13期)2020-01-14 03:15:32
制造技术与机床(2017年10期)2017-11-28 05:20:43
电子制作(2016年11期)2016-11-07 08:43:37
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
电测与仪表(2014年8期)2014-04-04 09:19:38
河南科技(2014年4期)2014-02-27 14:07:19