
螺旋桨附连水效应的数值计算方法研究
2019-07-30 06:46:54吴文伟
船舶力学 2019年7期
吴 帅 , 林 焰 , 吴文伟
(1.大连理工大学 船舶CAD工程中心,辽宁 大连116024;2.中国船舶科学研究中心,江苏 无锡214082)
0 引 言
螺旋桨在流体中振动时,流体会反作用于螺旋桨,从而使桨产生轴向加速度和周向角加速度,会导致形成纵向附连水质量和附连水转动惯量(极转动惯量)。其中,在船舶推进轴系的振动和校中分析计算中,这两个参数的计算正确与否,会直接影响轴系振动固有特性分析的准确程度[1-4]。所以,准确计算螺旋桨的附连水质量和转动惯量,成为分析轴系振动特性的关键一环。
目前,对螺旋桨附连水效应的研究,国外进行的试验和理论研究比较多。对于纵向附连水质量,一般分为桨转动和停止两种情况,国内基本利用国外的经验公式和经验系数来进行附连水效应的估算。Burrill等[5]做了大量螺旋桨模型试验,推导了纵向平动附加质量公式和相配的公式经验系数;Schwanecke[6]推导了商船的螺旋桨附连水转动惯量计算公式;Brooks[7]通过理论方法和试验研究了螺旋桨轴向振动的附连水质量;Parsons等[8]用专门的升力线和升力面理论对B系列桨的数值计算进行了统计分析,得到了螺旋桨轴向附连水质量和附连水转动惯量的计算公式和相应的公式系数;Harrington[9]基于桨的叶厚和叶宽建立了螺旋桨重量的计算公式,并用于桨附连水效应的估算;Donald等[10]对以往螺旋桨附连水效应的估算方法进行了概述性分析,并在Burrill估算公式的基础上进行了改进,并跟Burrill的试验结果数据进行了对比,具有很好的匹配性;Korotkin[11]对船舶结构的附连水质量进行了研究,对螺旋桨的附加质量进行了理论推导,讨论了确定螺旋桨附加质量的方法;Hutchison等[12]研究了导管螺旋桨的附加质量计算;邹冬林等[13]用面元法研究了船舶螺旋桨的附连水质量与阻尼;中国船级社CCS[14]规定了螺旋桨附连水效应考虑的经验系数。
对于螺旋桨的附连水效应分析,由于试验成本很高,所以采用数值模拟显得非常重要。本文通过Catia实现了螺旋桨的三维建模,利用Abaqus有限元分析软件进行了螺旋桨附连水转动惯量(极转动惯量)和纵向附连水质量的分析,同时利用多个经验公式进行了估算,将仿真和估算结果进行了对比和分析。
1 螺旋桨附连水效应分析

式中:M为整个系统质量(包含螺旋桨及其附连水质量);x¨为螺旋桨的振动加速度;F0为激振力大小;M0为螺旋桨质量(或者真空中的质量);m为螺旋桨的附连水质量。
由该理论可以知道,只需要计算出真空中和水中两种情况下的频率响应,针对某一频率处的加速度,求出对应的质量,取差值就可以得到附连水质量。如果将质量替换为转动惯量,激振力替换为激振扭矩,则同样可以计算附连水转动惯量,此处不再通过公式重复叙述。
将结构部分和流体部分均利用有限元法离散,从而建立并利用谐响应稳态分析法求解流体和固体耦合的振动方程,对整个系统施加一个外部激振力,从而将整个系统简化为一个单自由度强迫振动系统[14]:

该种激励情况,振动中振幅非常小,导致阻尼C和位移x的值也很小,可以忽略不计,那么振动方程可以简化为:

考虑附连水效应的整个系统质量:
2 螺旋桨附连水效应计算经验公式
(1)Parsons[8]基于升力线、升力面等理论,对B系列螺旋桨进行了数值计算和统计分析,提出了计算经验公式:

式中:因子CIE和CWER的计算公式为

上面公式中的系数取值如表1和表2所示。

表1 Parsons公式CIE计算经验系数Tab.1 Empirical coefficients of CIEin Parsons formula

表2 Parsons公式CWER计算经验系数Tab.2 Empirical coefficients of CWERin Parsons formula
升力面修正系数LSC的计算公式:


式中:IE为附连水转动惯量,kg·m2;WEL为纵向附连水质量,kg;D为螺旋桨直径,m;ρ为水的密度,kg/m3;为螺距比;EAR为盘面比。
描述桨叶几何特征的比率AR:
(2)Donald等[10]考虑到Burrill的评估公式在许多情况下计算螺旋桨的附连水效应时不够精确,对其公式进行了改善,系数取值如表3和表4所示。附连水转动惯量IE:

轴向附连水质量WEL(桨停车状态):



表3 Donald/Burrill公式CIE计算系数Tab.3 Empirical coefficients of CIEin Donald/Burrill formula

表4 Donald/Burrill公式CWEL计算系数Tab.4 Empirical coefficients of CWELin Donald/Burrill formula
可以通过一个新的关系来修正螺旋桨从“停车”(locked)到“旋转”(rotation)的附连水质量。该修正因子可以由下面公式得到:

(3)Schwanecke[6]提出了用于商船螺旋桨附连水转动惯量评估的公式。
附连水转动惯量IE:

3 螺旋桨及桨水耦合有限元模型
本文采用的螺旋桨模型为某多用途船的螺旋桨设计,其主要设计参数和材料属性如表5所示。

表5螺旋桨设计参数及材料属性Tab.5 Design parameters and material property of propeller
根据螺旋桨的参数,利用张宏伟[16]的螺旋桨三维坐标转换公式,可以推导出桨的三维坐标,利用Catia建立螺旋桨的三维几何模型,导入Abaqus后,进而建立桨、水域的三维模型,最后划分网格完成螺旋桨有限元模型、桨-水耦合有限元模型,如图1-4所示。为降低边界对计算的影响,水域模型的半径大约为桨模型半径的6倍,水域外部边界条件设定为无反射边界;内部跟桨毂接触部分,由于桨旋转和轴向振动过程中桨毂引起的附连水效应微小,所以不考虑桨毂外形引起的附连水效应,即无需对桨毂与水建立相互作用。同时,为了模拟水在桨毂表面的边界条件,将该桨毂表面可形成的圆柱形设定为固定边界,作为水域内边界,来模拟水不能越过桨毂。但是为了方便在桨叶上施加作用力和真实模拟整个桨体,仍需要建立桨毂模型,通过建立参考点与桨毂内表面耦合,在参考点上施加激励载荷可以得到桨的振动响应;内部跟桨叶接触部分,由于桨附连水效应主要由叶片导致,所以通过将叶面和接触水绑定来模拟实际情况。为了满足计算精度和降低成本,水域模型采用内细外粗,桨叶接触水两部分,划分的网格大小相同。水域采用了声学四面体单元AC3D10,螺旋桨采用实体四面体单元C3D10。利用Abaqus的模型分析功能,可以得到螺旋桨的质量和转动惯量分别为11 190 kg和14 000 kg·m2,图纸提供的桨质量和转动惯量分别为11 560 kg和14 110 kg·m2,误差大小分别为3%和0.7%,在5%以内满足分析要求,可以利用此模型进行螺旋桨附连水效应的分析计算。螺旋桨有限元模型由18 389个C3D10单元构成,水域由167 743个AC3D10单元构成。

图1螺旋桨三维几何模型Fig.1 3D model of the propeller

图2螺旋桨有限元模型Fig.2 Finite model of the propeller

图3桨水耦合三维几何模型 Fig.3 3D model of the propeller-water coupling
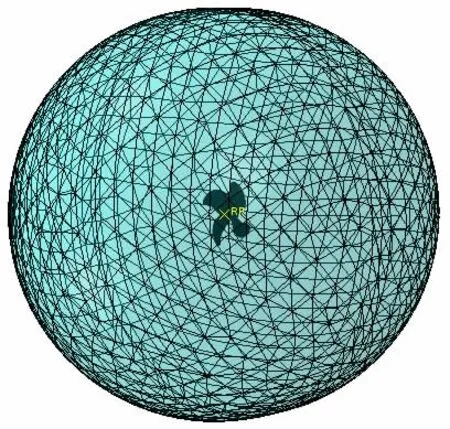
图4桨水耦合有限元模型Fig.4 Finite model of the propeller-water coupling
4 螺旋桨附连水效应的计算分析
4.1 附连水转动惯量的计算分析
为了施加激振载荷,在桨毂的内表面中心处,建立一个与桨毂内表面耦合的参考点,这样可以在该点处施加绕桨轴的激励扭矩。计算时,空气中和水中对螺旋桨的激励扭矩均设定为 10 000 N·mm,激励频率为 1~80 Hz。通过频率响应计算,可以计算出螺旋桨耦合前后在各个频率处的加速度。当螺旋桨在远离共振频率的频率段时,就可以通过比较参考点处耦合前后的某频率处的加速度,计算出该频率下的附连水质量。考虑到共振频率附近,由于失真很大,会导致该方法失效,所以尽可以远离共振区选择低频区的频率点。另一方面,螺旋桨处的自身激励频率主要为叶片次激励频率。根据本文中螺旋桨的额定转速,可以计算出激励频率为9.733 Hz,仿真中均为整点频率,所以选择10 Hz来进行对比分析。真空中和水中的频率响应分析结果如图5和图6所示。可以看出由于水的耦合作用,导致螺旋桨的共振频率点降低,即固有频率降低,符合实际的振动情况。

图5真空中参考点角加速度响应曲线Fig.5 Angular acceleration response curve of reference point in vacuum
利用两种情况下10 Hz频率点处的角加速度,结合激励扭矩,可算出转动惯量。根据两个结果的差值,得到附加转动惯量,并跟Abaqus分析得到的桨转动惯量对比,得到相对系数,如表6所示。
利用前面介绍的经验公式进行螺旋桨附加转动惯量的估算,同仿真结果进行对比,结果对比如表7所示。相对系数为附加转动惯量与真空中桨惯量的比值,整体系数为水中桨转动惯量和真空中桨惯量的比值,相差百分比以计算的最小结果为基准,即Donald/Burrill的计算结果。

图6水中参考点角加速度响应曲线Fig.6 Angular acceleration response curve of reference point in water

表6 Abaqus仿真得到附加转动惯量Tab.6 Added inertia obtained in Abaqus

表7四种计算方法结果对比Tab.7 Comparison of the results of the four methods
通过上表可以看出,Abaqus计算结果处于经验公式计算范围内,而且相差百分比为3.28%,在5%以内,相对来说比较合理。
4.2 纵向附连水质量的计算分析
考虑到软件的计算能力有限,本文只分析螺旋桨“停车”(locked)状态下的纵向附连水质量。针对此种情况,同样在参考点处施加轴向激励载荷。计算时,空气中和水中对螺旋桨的激励力均设定为x轴向力10 N,激励频率为1~80 Hz,跟前面附连水转动惯量的分析类似,选择10 Hz来进行对比分析。真空中和水中的频率响应分析结果如图7和图8所示,同样可以看出由于水的耦合作用,导致螺旋桨的纵向共振频率点降低,即固有频率降低,符合实际情况。
利用两种情况下10 Hz频率点处的加速度,结合激励力可算出质量,根据两个结果的差值,得到附加质量,并与Abaqus分析得到的桨质量对比,得到相对系数,如表8所示。
同样,利用前面介绍的经验公式进行螺旋桨附加质量的估算,rotation和locked这两种状态都用计算公式计算,同仿真结果进行对比,结果对比如表9所示。相对系数为附加质量与真空中桨质量的比值,整体系数为水中桨质量和真空中桨质量的比值,相差百分比分别在两种状态下(rotation和locked)以计算的最小结果为基准。

图7真空中参考点加速度响应曲线Fig.7 Acceleration response curve of reference point in vacuum

图8水中参考点加速度响应曲线Fig.8 Acceleration response curve of reference point in water

表8 Abaqus仿真得到附加质量Tab.8 Added mass obtained in Abaqus
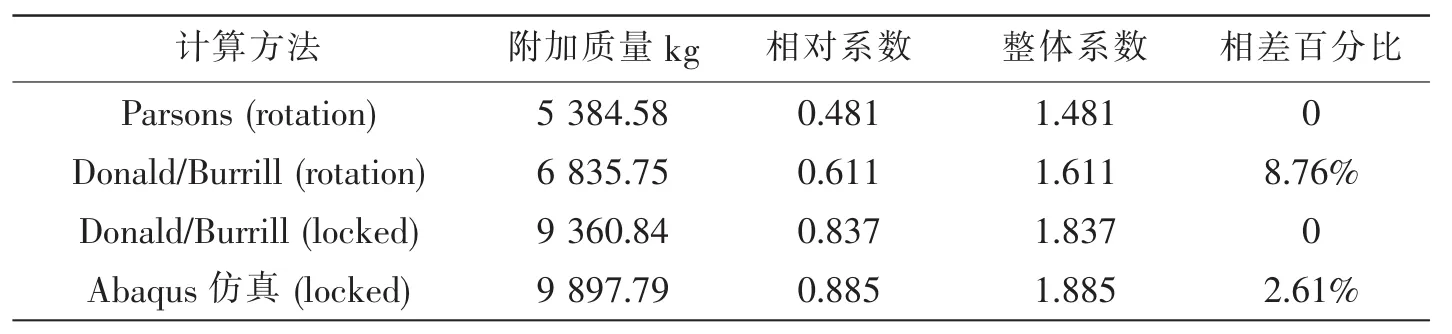
表9各计算方法结果对比表Tab.9 Comparison of the results of the different methods
通过上表可看出,Abaqus结果与Donald/Burrill(locked)很接近,相差百分比为2.61%,在5%以内,比较合理;还可看出Parsons(rotation)和Donald/Burrill(rotation)计算结果有些偏差,而且可以得到“旋转”状态下的附连水质量小于“停车”状态下的结论。
5 结 论
本文通过对螺旋桨的附连水效应进行仿真计算,并跟经验公式的计算结果进行对比分析,可以得到如下结论:
利用谐响应稳态计算方法对螺旋桨进行频率响应分析,选取低频区的非共振频率点,可以计算出螺旋桨的附连水转动惯量(极转动惯量)和纵向附连水质量。通过跟经验公式计算结果对比分析,可以得到,数值仿真和经验公式结果误差在5%以内,满足计算要求;而且,还得到螺旋桨在旋转情况下纵向附连水质量比停止情况小的结论。因此,在对螺旋桨的附连水效应数值精度要求高的情况下,可以利用该方法进行计算。
猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
航空发动机(2020年3期)2020-07-24 09:03:16
测控技术(2018年5期)2018-12-09 09:04:24
精密制造与自动化(2018年1期)2018-04-12 07:42:50
设备管理与维修(2016年5期)2016-03-16 02:20:46
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
振动、测试与诊断(2014年4期)2014-03-01 01:14:01
