基于FRT-MLVD的无源雷达机动目标徙动补偿算法
2019-07-26 02:33赵勇胜胡德秀靳科刘智鑫赵拥军
通信学报 2019年7期
赵勇胜,胡德秀,靳科,刘智鑫,赵拥军
(战略支援部队信息工程大学数据与目标工程学院,河南 郑州 450001)
1 引言
无源雷达(PR, passive radar)是一种利用环境中非合作辐射源电磁信号作为外辐射源的特殊双基地雷达系统,该体制雷达自身并不辐射电磁波,而是被动地接收目标反射/散射的外辐射源电磁信号来探测目标[1]。这种与传统有源雷达截然不同的工作方式,使PR系统具备多种优点,包括隐蔽性高、不占用频率资源、抗干扰及抗摧毁能力强、体积小、成本低、易部署等。因此,多年来该体制雷达一直是雷达领域的研究热点。
无源雷达接收机通常布设两副天线,分别用于接收外辐射源直达信号和目标回波信号[2]。相比于噪声干扰,无源雷达接收的目标回波信号通常非常微弱。因此,无源雷达需要对回波信号进行相参积累,从而提高回波的信噪比。目前,无源雷达最常用的相参积累方法是互模糊函数(CAF, cross ambiguity function)[3]。然而,对于一些高速机动目标,如弹道导弹、高超声速飞机、高空高速巡航导弹、临近空间飞行器等[4],在积累时间内会发生严重的距离徙动(RM, range migration)和多普勒徙动(DFM, Doppler frequency migration)。此外,无源雷达在探测远距离小雷达截面积(RCS, radar cross section)目标时,为了提高积累增益,需要尽可能地延长积累时间。随着积累时间的延长,目标运动参数导致的距离徙动和多普勒徙动将越发显著。而距离徙动和多普勒徙动的存在将导致回波能量分散和检测性能恶化。因此,研究无源雷达的相参积累徙动补偿方法成为提高无源雷达目标探测能力的关键。
目前,对于徙动补偿的研究多集中在脉冲体制的主动雷达系统[5-9],而对于无源雷达系统的目标徙动问题的研究则较少。但近年来,随着人们对于无源雷达关注度的提升,陆续出现了一些针对无源雷达目标徙动问题的研究。这些研究可以分为2种思路:一种是通过在无源雷达信号模型中引入速度和加速度影响因子,来修正互模糊函数,从而延长相参积累的时间,但是这类算法的计算复杂度高,难以满足无源雷达信号处理的实时性要求[10-12];另一种是对信号进行分段处理,段内为快时间,段间为慢时间。文献[13-14]将信号分段后,沿快时间匹配滤波,然后通过 Keystone变换(KT, Keystone transform)校正了目标的距离徙动,但该算法未考虑目标机动性,仅适用于匀速目标。文献[15]在信号模型中考虑了目标的加速度,并利用Keystone变换和时频变换分别校正了距离徙动和多普勒徙动,但其忽略了加速度引起的距离弯曲及速度距离徙动校正时在加速度指数项新引入的快时间频率和慢时间的耦合关系。文献[16]针对匀加速目标,提出了一种基于Keystone变换结合傅里叶变换分段计算的高速机动目标检测方法,其对分段后的信号利用Keystone变换校正目标速度引起距离徙动,再对慢时间进行二次分段,并结合傅里叶变换的分段计算完成径向加速度差的距离徙动和多普勒徙动校正,使相参积累时间不再受速度和加速度的限制。但是,上述研究并不适用于变加速运动目标。对于变加速运动目标,其第二加速度对信号长时间相参积累的影响不可忽略[17]。因此,有必要进一步针对无源雷达中变加速运动目标的相参积累问题进行研究。
为了对变加速运动目标进行相参积累,不仅需要校正补偿速度和加速度引起的距离徙动和多普勒徙动,还需要校正补偿目标第二加速度引起的三阶距离徙动和多普勒徙动(又称为多普勒弯曲),这对信号处理提出了更高的要求。广义Radon傅里叶变换(GRFT, generalized Radon Fourier transform)理论上可以实现任意高阶运动目标的参数估计和徙动校正,但是存在的盲速旁瓣和计算量过大的缺陷,限制了其在实际中的应用[18]。本文针对无源雷达系统的变加速运动目标长时间相参积累检测问题,首先提出了一种频域序列反转变换(FRT,frequency reversing transform),该变换可以有效去除目标信号中的距离徙动,将信号能量积累至同一距离单元内。该距离单元内的信号可以看作二次调频(QFM, quadratic frequency modulated)信号。QFM信号是一种常见的非平稳信号,它的初始频率、调频率、二次调频率是表征QFM信号频率特性的基本参数,且估计问题一直备受关注并形成了一系列的有效算法[19-22],其中,改进吕分布(MLVD,modified Lv’s distribution)算法能够以高分辨率对QFM信号进行快速参数分析,并具有良好的抗噪声性能[22]。因此,本文在去除距离徙动后,利用MLVD算法估计目标加速度和第二加速度,最后,在补偿目标加速度和第二加速度引起的距离徙动和多普勒徙动后,利用Keystone变换校正了目标速度引起的距离徙动,实现了目标回波的长时间相参积累。相比于现有的徙动补偿算法,本文所提算法充分考虑了第二加速度对距离徙动和多普勒徙动的影响,对变加速运动目标具有良好的积累效果,仿真实验验证了所提算法的有效性。
2 信号模型
考虑如图1所示的双基地无源雷达目标探测模型。其中,外辐射源和接收机的位置向量分别为xT和xR,基线距离向量为l=xT-xR。运动目标在初始时刻的位置向量为x(0),此时到外辐射源和接收机的距离向量分别为r1(0)=x( 0)-xT和r2( 0)=x( 0)-xR。假设目标做变加速运动,其速度为v,加速度为a,第二加速度为k,则t时刻目标运动至位置,此时到外辐射源和接收机的距离向量分别为
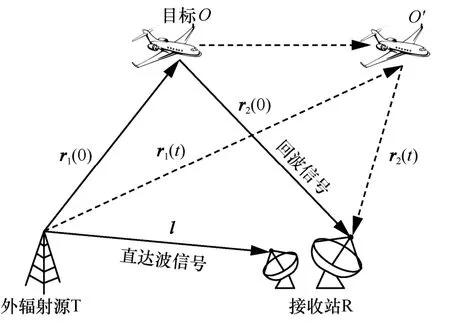
图1 无源雷达目标探测模型
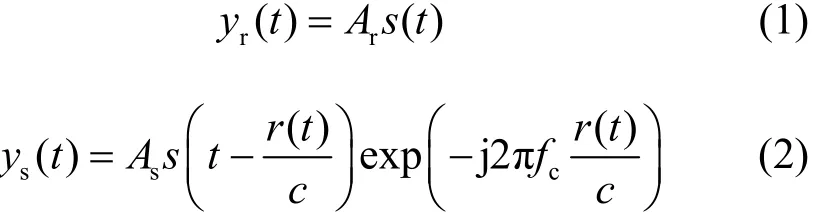
基于上述假设,t时刻外辐射源的直达波与其经过目标反射后的回波信号到达接收站的路径差为r(t) = | |r1(t) | |+| |r2(t)||-||l||。假设外辐射源发射的基带信号为s(t),载频为fc,信号传播速度为c,则t时刻接收到的外辐射源直达波信号yr(t)和目标回波信号ys(t)可以表示为
通过重叠分段的方式[13],人为地划分快慢时间,可将2路信号划分为等效脉冲序列,即


其中,tf为快时间,tm=mTr(m= 0 ,1,… ,M-1)为慢时间,Tr为等效脉冲重复时间。需注意的是,在划分快慢时间时,需保证在一个慢时间内,目标的距离和多普勒变化分别小于距离分辨率和多普勒分辨率。接下来,对2路信号进行脉冲压缩。对式(3)
和式(4)分别进行傅里叶变换(FT, Fourier transform),得
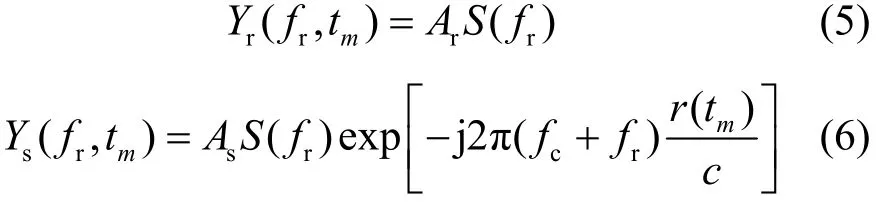
其中,S(fr)=FT[s(tf)]。将式(5)的共轭和式(6)相乘并进行傅里叶逆变换(IFT, inverse Fourier transform),得
其中,A1为信号幅度其峰值位于tf= 0 处。
将r(tm)进行泰勒级数展开,得

目标的初始双基地距离,a1、a2、a3分别为目标的双基地速度、双基地加速度与双基地第二加速度[11-12],a0~a3具体计算式为
其中,n⊥为双基地椭球在目标位置x(0)处切面的
单位法向量(即双基地意义上的径向向量),β为目标初始时刻的双基地角度。需要指出的是,式(11)中目标速度分量v在积累时间内也会造成一定的双基地加速度分量,但其通常远小于目标加速度a引起的双基地加速度分量,因此可以忽略[14]。同样地,式(12)中目标速度v、加速度a引起的双基地第二加速度分量也被忽略,即双基地第二加速度主要由目标加速度k引起。更具体地说,目标的双基地速度a1、双基地加速度a2、双基地第二加速度a3分别主要由目标速度v、加速度a、第二加速度k在径向上的投影决定。因此,对于变加速目标,在进行相参积累时,可以将目标的瞬时双基地距离泰勒级数展开式近似为三阶多项式[23-24]

结合式(7)和式(13)可以看出,目标的距离徙动包括目标双基地速度引起的线性距离徙动,以及双基地加速度和第二加速度引起的二阶和三阶距离徙动(距离弯曲)。目标的多普勒徙动包括目标双基地加速度引起的线性多普勒徙动,以及目标双基地第二加速度引起的二阶多普勒徙动(多普勒弯曲)。距离徙动和多普勒徙动的存在,都会使回波能量在积累时间内分散在不同的距离和多普勒单元,导致积累增益降低。
3 基于FRT-MLVD的目标运动参数估计算法
为了消除距离徙动,本文提出了一种频域序列反转变换,该变换可以实现慢时间tm与距离频率fr的解耦合,从而消除距离徙动,将信号能量集中至同一距离单元。然后利用改进吕分布方法对该距离单元内的回波信号进行处理,实现对目标运动参数的估计。
3.1 基于FRT的距离徙动消除
将p(tf,tm)沿tf维进行傅里叶变换至距离频率fr维,得

其中,A2为信号幅度。
本文提出的频域序列反转变换定义为:将P(fr,tm)在fr维进行序列反转,也就是将fr维由反转排列为,从而得到频域反转序列为
将式(14)中的P(fr,tm)和式(15)中的频域反转序列相乘,得从式(16)可以看出,将P(fr,tm)和其频域反转序列相乘后,指数项中关于距离频率fr的部分被对消掉,从而将慢时间tm与距离频率fr之间的耦合解除,使目标的距离徙动得到校正。
3.2 基于MLVD目标加速度和第二加速度估计
将式(16)沿fr进行IFT,得
其中,A3为信号幅度,s′(tf) = I FT {S(fr)4},其峰值位于tf= 0 处。也就是说,利用FRT消除距离徙动后,信号能量落在了距离单元tf= 0 内。为便于分析,只考虑该距离单元内的信号,即

其中,A4为信号幅度,从式(18)可以看出,R(t)是关于t的2mm二次调频信号。这里,采用MLVD算法估计QFM信号的参数。
首先,式(18)的对称参数自相关函数为其中,τm为时延变量。根据文献[25-26],将ϖ的值设置为0.089M,α的值设置为 1。将式(18)代入
式(19),得

可以看到,式(20)的指数项中慢时间tm与时延变量mτ存在耦合。为了消除该耦合关系,采用如式(21)所示的变量代换。

其中,h为尺度变换因子,需满足αh=1,因此将h设置为1[26]。将式(21)代入式(20),得
显然,通过变量代换后,慢时间tm与时延变量mτ的耦合被去除。此时,对式(22)沿tn维进行快速傅里叶变换(FFT, fast Fourier transform),可得
其中,ftn为对应于tn的频域变量,δ(·)为狄拉克函数。对式(23)沿τm维进行FFT,可得
其中,fτm为对应于τm的频域变量,Qτm(ftn,fτm)的唯一峰值出现在,通过搜索Qτm(ft
n
,fτm)的峰值所在位置,可估计出QFM信号的调频率φ2和二次调频率φ3参数,从中可进一步估计出目标双基地加速度a2和双基地第二加速度a3。
3.3 目标双基地距离和速度估计
接下来,利用估计出的目标运动参数a2和a3构建补偿函数,如式(25)所示。

将补偿函数Pref(fr,tm)与式(14)相乘,得

可以看到,式(26)的指数项中慢时间tm与距离频率fr存在耦合。为了消除该耦合关系,采用如下的Keystone代换

将式(27)代入式(26),得
显然,经过变量代换后,慢时间tm与距离频率fr的耦合被去除。此时,对式(28)沿fr维进行IFT,沿tn维进行FT,得

由式(29)可知,R7(τ,f)在位置出现唯一峰值,通过搜索该峰值所在位置,可估计出目标的初始双基地距离a0和双基地速度a1。
4 仿真实验
为评估本文所提算法的相参积累效果,进行仿真实验。仿真场景为:外辐射源信号的载频fc= 1 GHz ,带宽B= 1 MHz ,采样频率fs= 5 GHz,划分的脉冲重复时间Tr= 1 .3ms,积累脉冲数1 024。待探测目标作变加速运动,其运动轨迹满足r(t) ≃ 10 000 + 1 000t+ 5 0t2+15t3。
4.1 FRT-MLVD 算法对目标回波信号的积累效果
利用本文所提算法对回波信号进行积累,结果如图2所示。
图2(a)给出了分段信号的脉冲压缩结果,可以看出,由于目标运动的影响,积累时间内出现了严重的距离徙动。图2(b)给出了FRT处理后的结果,可以看到,距离徙动被去除,回波信号能量被集中到同一距离单元内。取该距离单元内的信号进行MLVD处理,图2(c)给出了MLVD的积累结果,可以看出,信号在调频率-二次调频率空间内形成高分辨率单一峰值,通过搜索峰值所在位置,即可估计出目标的加速度和第二加速度。利用估计出的目标加速度和第二加速度构造参考信号,从而补偿目标加速度和第二加速度引起的距离和多普勒徙动,图2(d)给出了补偿二次和三次的距离徙动后残留的徙动情况。比较图2(a)和图2(d)可以看出,仅含有目标速度引起的线性徙动,说明MLVD估计出的目标加速度和第二加速度这2个参数的准确度很高,距离弯曲和多普勒弯曲被几乎完全消除。通过Keystone变换对补偿后的信号进行校正,图2(e)给出了Keystone变换校正的结果,与图2(d)比较可以看出,图2(e)残留的线性徙动被校正,回波信号能量被集中到同一距离单元内。图 2(f)给出了对慢时间维进行FFT后的相参积累效果,从其局部放大图可以看出,信号能量被集中到了同一距离和速度单元内。
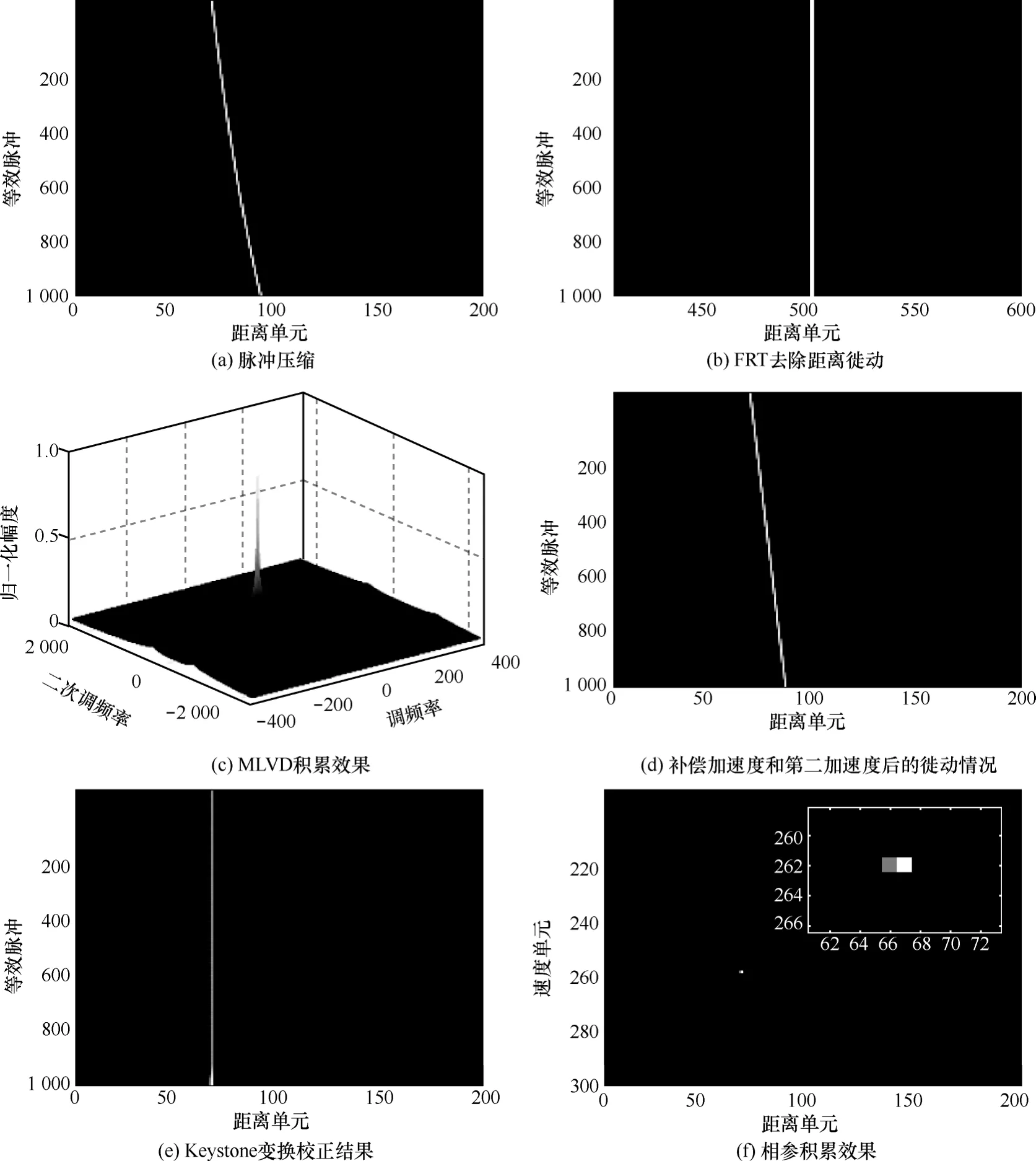
图2 本文所提算法对目标积累效果
4.2 不同信噪比条件下算法的估计精度
为了突出本文所提算法对回波信号积累效果的优越性,将本文所提算法与目前已有的几种无源雷达的目标回波积累算法进行了比较,如图3所示,包括互模糊函数(CAF)算法[3]、Keystone变换(KT)算法[14]、包络插值结合分数阶傅里叶变换(EI-FRFT,envelope interpolation-fractional Fourier transform)算法[15]和 Keystone变换结合傅里叶变换(KT-FT,Keystone transform-Fourier transform)算法[16]。回波信号的信噪比设置为-15 dB。
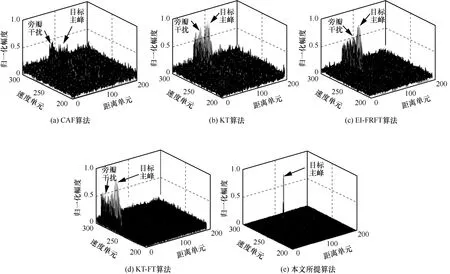
图3 不同算法回波积累效果比较
从图3可以看出,仅有本文所提算法将回波信号的能量集中在一点,积累后回波信号的能量最强。CAF算法由于并未考虑任何徙动的影响,因此其积累效果最差,在目标主峰附近的旁瓣干扰非常大,甚至出现了高于目标主峰的伪主峰。KT算法由于考虑了目标速度造成的徙动,因此与 CAF算法相比,伪主峰被消除,但是在目标主峰附近,仍存在着严重的旁瓣干扰。EI-FRFT算法相比于 KT算法,旁瓣干扰得到一定程度的抑制,这主要得益于其信号模型中进一步考虑了目标加速度造成的徙动。相比于EI-FRFT算法,KT-FT算法的旁瓣干扰得到进一步的抑制,但由于其算法模型中仅考虑了目标加速度的影响,忽略了第二加速度的影响,因此其积累后的目标主峰附近仍存在较强的旁瓣干扰。由于CAF算法、KT算法、EI-FRFT算法和KT-FT算法等现有算法均未考虑目标第二加速度造成的徙动,积累后的目标主峰附近均存在一定程度的旁瓣干扰,这将给目标检测造成严重的虚警和漏警。本文所提算法充分考虑了目标速度、加速度、第二加速度的影响,旁瓣干扰得到抑制,信号能量被更加集中在主瓣内。
4.3 不同信噪比条件下算法的检测概率
接下来,比较几种算法的目标检测性能。采用CFAR检测,将虚警率设置为Pf= 1 0-4,目标检测概率由1 000次蒙特卡罗仿真统计得到。回波信噪比设置为-50~10 dB,在该信噪比范围内,统计几种算法的检测概率,结果如图4所示。
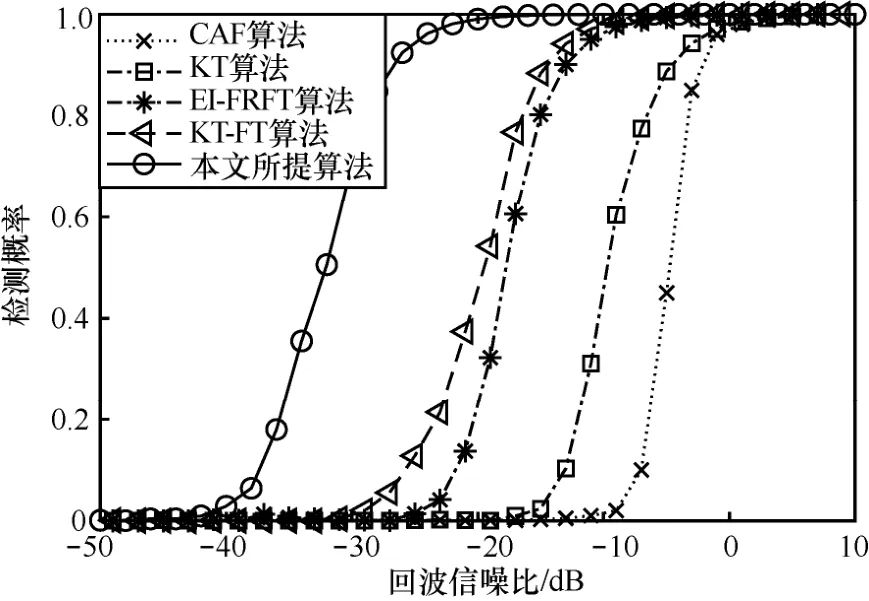
图4 不同算法的检测性能曲线( P = 1 0-4)f
从图4可以看出,同等条件下,本文所提算法的检测概率显著优于现有算法。CAF算法由于完全没有考虑徙动的影响,因此其积累后检测性能最差。KT算法由于考虑了目标速度引起的距离徙动,检测概率有所提升。EI-FRFT算法与KT-FT算法相比,检测性能进一步提升,但由于忽略了第二加速度的影响,目标检测性能仍不甚理想。本文所提算法的目标检测性能显著优于CAF算法、KT算法、EI-FRFT算法和KT-FT算法,这主要得益于本文所提算法充分考虑了目标第二加速度的影响,回波积累的能量更加集中于主瓣内,避免了旁瓣干扰引起的能量损失,因此检测概率更高。
5 结束语
本文研究了无源雷达中复杂运动目标回波信号的长时间积累问题。复杂运动目标的速度、加速度、第二加速度等参数,在回波积累过程中将产生严重的距离徙动和多普勒徙动,如不能有效补偿,将导致回波积累的能量分散和检测性能的恶化。为此,本文提出了一种基于频域序列反转变换(FRT)和改进吕分布(MLVD)的无源雷达目标回波长时间相参积累算法。本文所提算法的基本思想是,首先利用FRT去除距离徙动,将回波能量积累至同一距离单元内,然后利用MLVD对该距离单元内的回波信号进行处理,估计出目标的加速度和第二加速度参数,再利用估计出的加速度和第二加速度参数构造参考信号,从而补偿目标加速度和第二加速度引起的二次和三次徙动,最后利用KT校正了目标速度引起的线性徙动,并将目标回波积累至一点。仿真实验证明了本文所提算法的回波积累效果要显著优于现有算法。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
北京航空航天大学学报(2021年9期)2021-11-02
空间科学学报(2020年3期)2020-07-24
国学(2020年1期)2020-06-29
医学新知(2019年4期)2020-01-02
电子制作(2019年12期)2019-07-16
家庭影院技术(2018年11期)2019-01-21
北京航空航天大学学报(2017年6期)2017-11-23
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18