基于多QoS约束条件的广域信息管理系统任务调度算法
2019-07-26 02:33李罡吴志军
通信学报 2019年7期
李罡,吴志军
(1. 天津大学电气自动化与信息工程学院,天津 300072;2. 白城师范学院机械工程学院,吉林 白城137000;3. 中国民航大学电子信息与自动化学院,天津 300300)
1 引言
1997年,欧洲航空安全组织向美国联邦航空局提出广域信息管理系统(SWIM, system-wide information management)概念[1],国际民航组织(ICAO, International Civil Aviation Organization)于2002年接受了这个概念[2]。SWIM是一个集成度很高的大规模网络系统,它可以对内部资源进行整合和管理,从而提高系统信息的利用率和资源的共享率。SWIM作为一个信息共享平台,为不同的民航业务子系统提供统一的数据传输和交换机制,并以提高子系统业务处理效率为目的,实现民航各相关单位之间的信息共享性和互通性[3]。在空管、航空公司、机场等空中交通运输参与者之间实现一体化、标准化、灵活的通信、导航、监视、运行、气象、情报数据的发布与共享,满足未来民航高效协同运行的需求。
为了提高广域信息管理系统的资源利用与共享率,需要解决系统任务调度问题,对用户提出的需求找到合适节点进行任务处理,并且应在SWIM任务调度过程中综合考虑用户的服务质量(QoS,quality of service)需求。蚁群算法具有并行性和顽健性的特点,可以很快取得高质量的解,已经成功解决了很多不同类型的调度问题。本文在总结现有的网络任务调度技术并结合 SWIM 自身特点的基础上,以多QoS约束条件为立足点,利用蚁群优化(ACO, ant colony optimization)算法提出了一种改进传统蚁群算法的SWIM任务调度算法QoS-ACO,保证用户任务调度QoS要求尽可能地得到满足,提高SWIM整体性能。
2 相关工作
目前,国内外专家学者在大型网络系统的任务调度方面进行了很多研究,如针对现在比较流行的云计算、网格等网络系统的研究。Min-Min算法[4]、Max-Min算法[5]、Max-Int算法[6]和遗传算法(GA,genetic algorithm)[7]等任务调度算法都是经典的研究成果,在网络系统任务调度中得到应用并取得了比较好的效果。此外,Buyya等[8]还提出一种基于经济模型的优化调度模型,为研究任务调度算法提供了新的思路。但这些算法也存在一些局限性和不足,它们都是基于最小化调度目标的思想提出的,而在任务调度算法的设计和改进中很少考虑到用户对服务质量的需求。
现在也有一些针对服务质量方面的任务调度方法研究。Castillo等[9]在解决资源调度过程中所产生的碎片问题和服务质量研究中,应用了数学几何方法建立资源预留调度机制。刘宴兵等[10]提出的S-GTSA(grid task scheduling algorithm based on QoS similarity)在任务调度过程中应用了服务质量相似度,在一定程度上满足了用户的QoS需求,但在任务完成时间跨度方面的考虑不够全面。邓见光等[11]针对云计算中的 QoS任务调度问题进行了研究,对任务调度的多QoS目标约束条件进行形式化建模,提出了一种多QoS目标约束的云计算任务调度策略。文献[12]研究了一种基于离散粒子群优化的可重构系统任务调度方法,在任务调度过程中配置阈值,有效隐藏了任务的配置时间,提高了系统执行性能,但其目标单一,缺少对其他QoS参数的考虑。文献[13]设计的任务调度策略较合理,在任务调度过程中考虑的服务质量参数也比较全面,提高了系统任务调度效率,避免了系统负载不均衡现象的发生。
网络应用的广泛普及和网络技术的更新发展对任务调度的研究提出了新的要求,也对任务调度的服务质量提出了更高标准。本文分析、参考了大量分布和异构环境下的网络任务调度算法,在前人研究工作的基础上,结合广域信息管理系统自身的特点,针对SWIM中任务调度服务质量在任务完成时间、安全性和可靠性方面需求的特殊性进行了研究。通过采用并改进传统蚁群算法,提出了基于多QoS约束条件的广域信息管理系统任务调度算法QoS-ACO。仿真实验结果表明,所提出的QoS-ACO任务调度算法具有很好的综合QoS性能,在任务调度完成效率和满足客户服务质量需求方面的效果都比较好。
3 多QoS约束条件SWIM任务调度模型
3.1 SWIM任务调度模型
服务质量的约束条件有很多,在本文SWIM任务调度模型和QoS-ACO算法中,主要从以下3个方面进行考虑。
1) 时间。完成用户提交任务所需要的时间。
2) 安全性。在 SWIM 节点上可以获得的安全等级。
3) 可靠性。任务被成功执行的概率。
SWIM分为以下三层。
1) SWIM共享数据应用层(SDA, shared data application)。实现空管、机场和航空公司等客户端发出服务请求。
2) SWIM公共信息管理层(CIM, common information management)。负责系统中资源配置、负载均衡监控和队列管理等内容。
3) SWIM公共数据传输层(CDT, common data transport)。实现对分布的共享航空飞行等资源数据的采集。
在CIM中,SWIM任务调度中心能完成请求服务的任务调度、任务解析、任务分配以及建立服务虚拟机等功能。用户通过任务调度中心可以完全透明化地接入SWIM资源环境中。任务调度中心对系统资源和用户的需求进行统一分配和管理,针对不同任务的各自特点和资源需求,在任务调度模块中执行相应的任务调度算法。任务解析模块解析任务特点、获取特性,把任务调度分配到合适的服务资源上进行执行,保证QoS需求得到满足。由于服务节点在整个SWIM中的分布异构性,分配调度模块结合采集到的共享资源数据,按照任务解析模块对任务的分配要求来匹配资源,把最终的资源节点信息发送到虚拟机模块上,由其对用户提供所需的服务。多QoS约束条件SWIM任务调度模型架构如图1所示。
3.2 相关定义
为更好地描述QoS-ACO算法,首先进行如下一般性定义。
2) SWIM总调度任务集T= {t1,t2,t3,… ,ti,… ,tn},包括n个调度任务,ti为系统中第i个调度任务。
3) 预期执行时间矩阵(ETC, expected time to compute),为调度任务ti在资源节点sj上的预期完成时间。
4) 搜索表Tabu记录蚂蚁任务完成信息。
3.3 多QoS约束条件参数
为实现系统任务调度的QoS目标,采用隶属度函数思想将任务完成时间、安全性和可靠性进行目标约束化处理,具体过程如下。
1) 任务调度完成时间目标约束化处理
系统中参与任务调度的所有的调度任务完成时间为任务调度总完成时间。任务在不同节点上的执行时间会因系统的网络异构性和资源节点的性能差异性而不同,所以任务的调度策略会直接影响系统任务的总完成时间。用资源节点上最后一个任务的完成时间来表示该节点的任务完成时间Ti,如式(1)所示。

其中,tig为资源节点i上最后一个任务的完成时间。NTG{Ti}为系统中所有的资源节点任务完成时间的集合,以该集合中的最大值表示系统调度任务的总完成时间TIM,如式(2)所示。

所以,实现TIM值的最小化就可以达到优化系统总完成时间的目的。
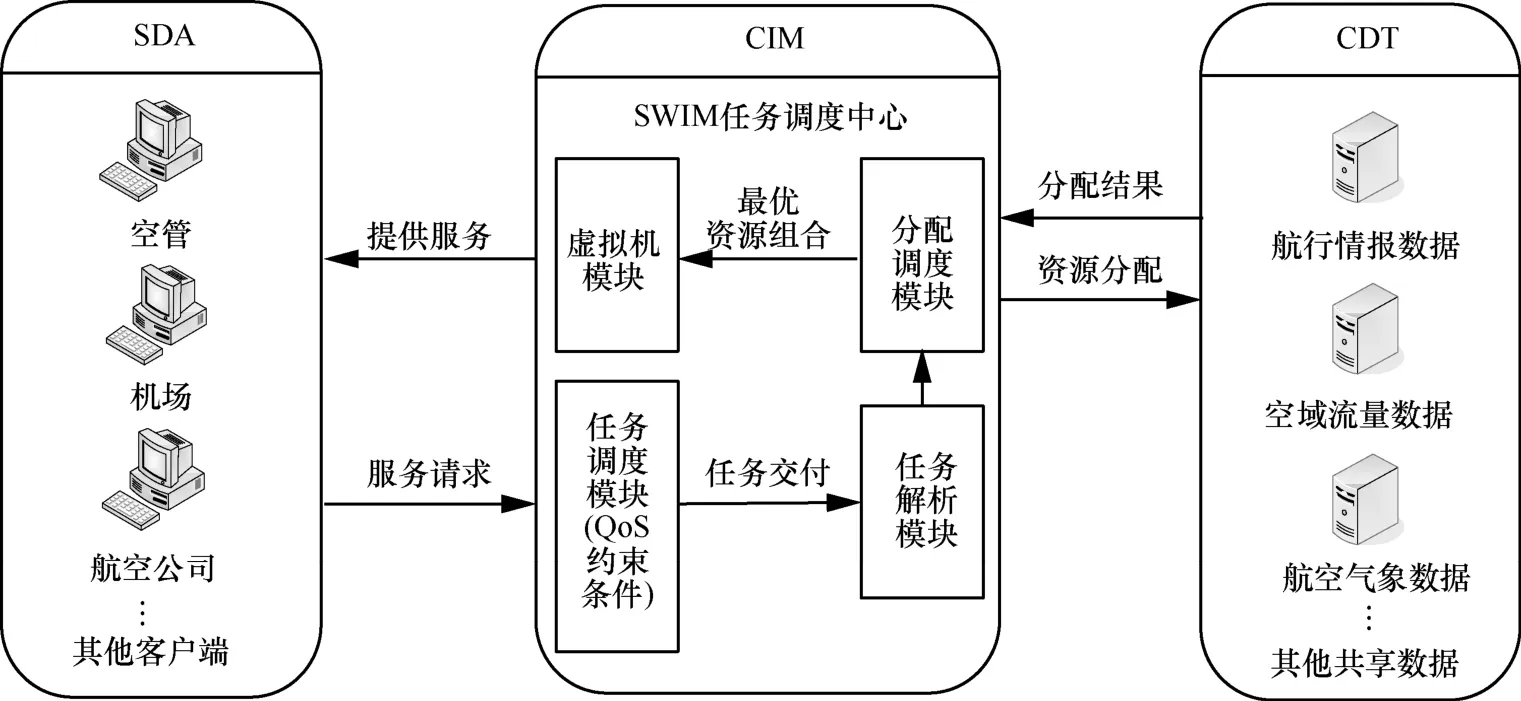
图1 多QoS约束条件SWIM任务调度模型架构
2) 任务调度安全性目标约束化处理
安全性定义为
其中,n为安全参数个数;li为第i个安全数的权重;当满足系统任务调度第i个安全参数时,seci=1,否则seci=0。
3) 任务调度可靠性目标约束化处理
任务调度的可靠性可以等效为在系统任务完成时间最小化的前提下,完成所有任务调度的成功率。系统中节点i完成全部任务过程中的任务调度成功率用指数率来表示,其表达式为

假设所有任务调度成功率互不影响,则系统全部资源节点完成所有任务的成功率为

3.4 多QoS约束条件求解
SWIM多 QoS约束条件求解分为以下几种情况。
1) 把任务ti调度到资源节点sj上进行处理时获得的服务质量时间参数效用等效为时间评价函数,如航空飞行计划任务在航行情报信息资源中进行分配时获得的 QoS时间性效用。假设Tmaxti为任务ti的最长完成时间,T(ti,sj)为任务ti调度到资源节点sj上需要的完成时间,λ为常数,则时间评价函数为

2) 把某个任务ti调度到资源节点sj上进行处理时获得的服务质量安全性参数效用等效为安全性评价函数,如航空飞行计划任务在航行情报信息资源中进行分配时获得的 QoS安全性效用。假设为任务ti应具有安全等级的最小值,为资源节点sj具有的安全等级,Smax是系统资源节点具有的最高安全等级,则安全性评价函数为

3) 把任务ti调度到资源节点sj上进行处理时获得的服务质量可靠性参数效用等效为可靠性评价函数,如航空飞行计划任务在航行情报信息资源中进行分配时获得的QoS可靠性效用。本文用调度任务完成的成功率来表征其可靠性,假设Rminti为任务ti完成成功率的最小概论值,为把任务ti调度到资源节点sj上进行处理所获得的可靠性,则可靠性评价函数为

假设系统资源节点sj的固有非成功率为Fsj,任务ti在资源节点sj上进行处理所需要的完成时间为T(ti,sj),则

用户满意度评价标准的计算式为

其中,E(ti,sj)为调度任务ti的服务质量总体效用评价函数,作为用户满意度的评价标准,用此函数值对蚁群优化算法中的信息素进行更新;时间、安全性和可靠性评价函数对应的权值分别用常数ϕ1、ϕ2和ϕ3来表示,且ϕ1+ϕ2+ϕ3= 1。
对总体效用评价函数E(ti,sj)进行线性加权处理,最终得到用户对任务完成服务质量的总效用评价函数,其计算式为

系统资源调度的目标就是确保总效用评价函数E值最大,以提高任务完成的服务质量,也用此函数来评价任务调度算法的性能。
4 基于多 QoS约束条件的蚁群优化任务调度算法
本文根据 SWIM 核心服务的特点对蚁群算法进行改进,使用SWIM中业务调度QoS总效用评价函数来更新蚁群算法中的信息素,提出了面向SWIM的多QoS约束条件蚁群优化任务调度算法QoS-ACO,在保障完成SWIM业务调度的同时,能够最大化用户满意度,提高SWIM核心服务的质量。
4.1 QoS-ACO算法优化规则
Dorigo等[14]通过观察自然界中的蚂蚁觅食行为产生了任务调度灵感,并于 1991年首次提出了蚁群算法,模拟蚂蚁觅食行为来达到全局寻优目的。假设t时刻蚂蚁k从资源节点i转移到资源节点j的概率值为利用该值来选择要调度的下一个任务。的计算式为
通过式(12)可知,影响资源节点选择的 2个关键因子是τij(t)和ηij(t),对这2个因子的改进是算法优化研究的重点。本文提出的面向SWIM任务调度的多QoS约束条件蚁群优化任务调度算法,就是在传统蚁群算法基础上对τij(t)做出相应改进,使用SWIM中业务调度QoS总效用评价函数E来更新蚁群算法中的信息素。
蚁群算法中更新信息素τij的计算式为

本文使用SWIM中业务调度QoS总效用评价函数E来更新信息素ijτ,其计算式为
为保障完成所有任务的时间最小,利用预期完成时间获得启发函数。从式(16)可知,预期完成时间的值与ηij(t)成反比关系。成正比关系,因此通过降低预期完成时间可以提高转移概率[15]。
把改进后的信息素浓度函数式(13)和启发函数式(16)代入任务转移概率式(12)中,得到优化蚁群算法 QoS-ACO后的任务ti被调度到资源节点sj的概率值本文提出的QoS-ACO算法计算复杂度为O( NCmaxn3),其中, N Cmax为循环次数,n为任务总数。本节涉及的函数及参数描述如表1所示。
4.2 QoS-ACO算法优化流程
QoS-ACO算法主要利用蚁群算法优化任务调度安排,依据任务在资源节点上的总效用值来选择节点处理调度任务。本文设计的QoS-ACO算法需要在完成调度任务的同时最大化用户的满意度,尽量获得比较高的总体评价。因此使用QoS总效用评价函数来更新蚁群算法中信息素,并且期望完成所有任务的时间最小,使用预期完成时间来计算蚁群算法的启发函数。最终依据任务转移概率的值,选择一个信息素浓度函数值高的资源节点来处理分配的任务。
SWIM 任务调度的关键是保证总体效用评价函数E(ti,sj)值最大,并将所有调度任务合理分配到相应的资源节点上进行处理。假设给定一个由n个任务组成的SWIM任务调度,其算法流程如图2所示,具体步骤如下。
1) 参数初始化。任务数量为n,资源数量为m,蚂蚁数量为q,最大的循环次数为tmax,初始时间t设置为0,在SWIM中假设有n个航空飞行计划任务,m个航行情报信息资源。
2) 初始化搜索表Tabu。
3) 利用Pijk(t)的值来确定接下来的调度任务,并选择具有最大效用的资源节点进行任务处理。
4) 把新的调度任务添加到搜索表中进行更新。
5) 根据式(13),使用总效用评价函数E来进行蚁群算法的信息素更新,并把筛选出具有最佳调度结果的蚂蚁信息进行保存。
6) 重复以上步骤直至t>tmax,算法结束[16]。
5 仿真实验及结果分析
为验证本文所提出算法的可行性和性能,在参考了民航某空中交通管理局已经部署的广域信息管理系统结构基础上,利用网络仿真软件NS-2搭建仿真实验环境。SWIM局部任务调度结构如图3所示。
5.1 实验环境及参数设置
在 NS-2网络仿真平台搭建的实验环境主要由调度器模块、服务器模块、客户端模块和路由器模块构成。调度器模块扮演调度者的角色,路由器模块负责路由转发,客户端模块和调度器模块通过路由器模块完成交互,调度器的功能是发现客户可以访问的资源,把任务映射到资源上后执行任务,最后收集结果。服务器模块为具有不同处理能力的服务节点,接收调度器模块分配的任务并执行,同时定期向调度器模块汇报自己的运行状态。网络测试拓扑如图4所示。
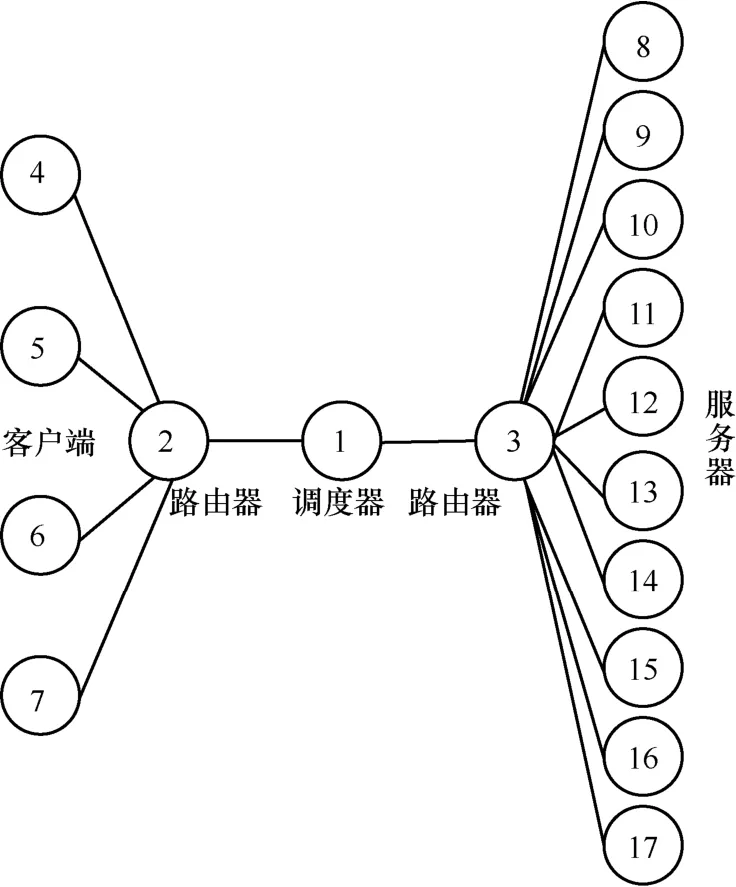
图4 仿真实验网络拓扑结构
仿真实验设计了具有一个调度器模块、2个路由器模块、10个服务器模块和4个客户端模块的拓扑结构模型。在模型中,节点1为系统调度器;节点2和节点3为路由器;节点4~节点7为客户端;节点8~节点17为服务器。
本实验选取了任务完成时间、安全性和可靠性作为三维QoS约束,在NS-2环境的仿真平台上对改进的蚁群优化算法进行仿真实验,并进行如下参数设置。
1) 任务完成时间。在任务调度过程中,任务的完成时间一定要小于用户定义的最大时间,任务的执行期限计算式为

其中,iγ为1~6的随机值,eti是任务ti的平均完成时间,kti是任务的到达时间。任务完成时间评价函数如式(6)所示。
2) 安全性。安全性级别设置为{poor, low, medium, high}4个等级,安全性评价函数如式(7)所示。
3) 可靠性。每个服务节点可以成功完成任务的概率。可靠性评价函数如式(8)所示。
4) QoS总效用评价函数的权值参数设置为:1ϕ=0.4,2ϕ=0.3,3ϕ=0.3。
5) 参考文献[17]中的ACO算法设置:α=1.0,β=2.0,μ=0.5。
6) 设置节点之间的链路带宽为200 Mbit/s,单向时延为20 ms。
7) 通过NS-2编译器创建调度服务器、调度路由器、用户和资源节点服务器对象。
8) 运用NS-2的解释器连接调度服务器,将调度路由器加载到其相邻节点。
仿真实验测试参数如表2所示。
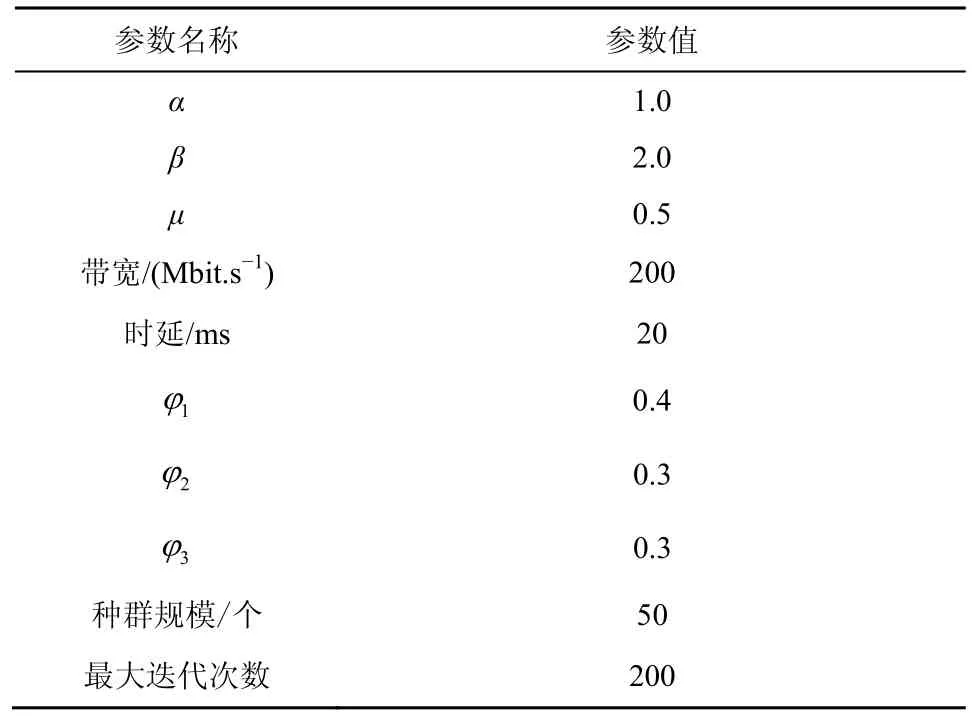
表2 仿真实验测试参数
5.2 实验结果及分析
仿真实验通过任务完成时间、安全性、可靠性和 QoS总效用值 4个评价指标对本文提出的QoS-ACO算法进行综合评价,并在相同条件下将QoS-ACO算法与经典的Min-Min算法[4]、启发式粒子群优化(PSO, particle swarm optimization)算法[18]进行比较分析,验证QoS-ACO算法的有效性。采用在 SWIM 资源节点数目m和任务数n不同情况下进行2种实验。
1) 资源节点数量m固定,任务数量n变化。在构建的SWIM仿真系统中,资源节点个数m=10,任务数量为n,1≤n≤400,比较3种算法在任务完成时间、安全性和可靠性值方面的性能,并通过总效用值来验证QoS-ACO算法的优越性。
2) 任务数量n固定,资源节点数量m变化。在构建的SWIM仿真系统中,任务数量n=200,资源节点个数为m,1≤m≤40,比较3种算法在任务完成时间、安全性和可靠性值方面的性能,并通过总效用值来验证QoS-ACO算法的优越性。
为使验证结果更加准确,每种实验进行 1 000次,取实验结果的平均值,并利用Matlab进行处理对比分析。
5.2.1 任务完成时间
任务完成时间可以反映出算法的高效性。在NS-2上运行QoS-ACO算法、PSO算法和Min-Min算法,经过路由选择操作后确定最终路径完成任务调度。通过Wireshark统计分析工具对得到的trace文件进行统计和分析,并利用Matlab对结果进行处理,得到3种算法的任务完成时间,如图5和图6所示。

图5 任务完成时间随任务数变化

图6 任务完成时间随资源节点数变化
从图 5可以看出,在蚁群寻径的初期,QoS-ACO算法、PSO算法和Min-Min算法在任务数量不多的情况下,任务完成时间相差不大。但随着任务数量的增多,QoS-ACO算法的任务完成时间明显小于PSO算法和Min-Min算法。从图6可以看出,在资源节点数量增加的情况下,QoS-ACO算法的执行调度任务时间始终小于PSO算法和Min-Min算法。这是由于在QoS-ACO算法中采用了预期完成时间来计算启发函数,调度路径空间得到扩展并分布均匀。虽然扩展路径空间在初期会带来总时延问题,但在之后的路径寻找过程中,蚂蚁会倾向于信息素浓度高并且完成时间最小的路径。由此可以得出结论,QoS-ACO算法可以提高任务的执行效率,使蚂蚁具有更强的任务调度能力。
5.2.2 安全性
安全性是任务调度的前提和保障。通过在NS-2上运行测量QoS-ACO算法、PSO算法和Min-Min算法的任务安全性数据得到 trace文件,通过Wireshark统计分析工具对得到的trace文件进行统计和分析,并利用Matlab对结果进行处理,结果如图7和图8所示。

图7 任务安全性随任务数变化

图8 任务安全性随资源节点数变化
从图7和图8可以看出,随着任务数量和资源节点数量的增加,QoS-ACO算法的任务安全性值始终高于 PSO算法和 Min-Min算法。这是因为QoS-ACO算法中的蚁群信息素更新是通过QoS总效用评价函数,而安全性评价函数为总效用评价函数的一部分,为保证总效用评价函数最大,就需要在任务调度过程中对其安全性进行考虑。由此可以得出结论,QoS-ACO算法可以保障蚁群在任务调度过程中资源的安全性。
5.2.3 可靠性
可靠性反映整个系统完成所有任务调度的成功性。在NS-2上运行得到QoS-ACO算法、PSO算法和Min-Min算法任务可靠性数据的trace文件。运用Wireshark统计分析工具对得到的trace文件进行统计和分析,并利用 Matlab工具对结果进行处理,结果如图9和图10所示。

图9 任务可靠性随任务数变化

图10 任务可靠性随资源节点数变化
从图9和图10可以看出,随着任务数量和资源节点数量的增加,QoS-ACO算法的任务可靠性值始终高于PSO算法和Min-Min算法。这是因为QoS-ACO算法中的蚁群信息素更新是用QoS总效用评价函数,而可靠性评价函数为总效用评价函数的一部分,为保证总效用评价函数最大,就需要在任务调度过程中对其可靠性进行考虑。由此可以得出结论,QoS-ACO算法可以提高任务调度完成的成功率,提升系统的任务调度性能。
5.2.4 总效用值
为提高用户对任务处理的满意度,需要保证服务质量总效用评价值最大,本文通过式(11)对任务调度算法的QoS总效用进行评价。在NS-2仿真平台中进行对比实验,并把每个任务依次提交至仿真系统中进行调度处理,实验结果如图 11和图 12所示。

图11 不同任务数下总效用值

图12 不同资源节点数下总效用值
从图11和图12可以看出,在任务数量增加和资源节点数量增加这 2种情况下,QoS-ACO算法所获得的总效用值都明显优于PSO算法和Min-Min算法。这主要是因为QoS-ACO算法考虑了用户对任务完成时间、安全性和可靠性3个服务质量方面的要求,并从这3个方面建立各自的约束条件,根据式(10)得到任务调度的QoS总效用评价函数,并使用该值对QoS-ACO算法中的蚁群信息素进行全局更新。由此可以得出结论,QoS-ACO算法在保障系统调度任务完成的前提下,可以提高系统对用户的服务质量。
5.3 比较分析
目前,在SWIM任务调度方面的研究及成果不是很多,针对SWIM任务调度算法的研究也很少。而在其他大型网络系统应用领域关于任务调度算法的研究已经取得了一定的成果,例如Min-Min算法[4]和启发式任务调度PSO算法[18]等。因此,将本文提出的 QoS-ACO算法与上述算法进行性能比较,结果如表3所示。

表3 部分任务调度算法任务调度性能比较
表3中性能比较结果数据中3组数值分别表示各自检测项目的最优值、平均值及两者差的绝对值,一般用最优值和平均值之差的绝对值来总体衡量检测项目的性能,其值越小则性能越好。从表3可以看出,本文提出的QoS-ACO算法在完成时间、安全性和可靠性方面的性能指标都优于 Min-Min算法和启发式任务调度PSO算法,且算法总效用值最高。
6 结束语
服务质量是衡量 SWIM 任务调度策略好坏的重要指标,本文以多QoS约束条件为立足点,实现SWIM任务最优调度目标;提出的基于多QoS约束条件 SWIM 任务调度蚁群优化算法,综合考虑了SWIM中用户的QoS需求;通过对蚁群算法的改进,使用SWIM中业务调度QoS总效用评价函数来更新蚁群算法中的信息素,保证在有效完成调度任务的同时,最大化满足用户的QoS需求。仿真实验表明,在多约束条件QoS任务调度模型中,QoS-ACO算法在任务完成时间、安全性、可靠性和总效用值方面比PSO算法和Min-Min算法有一定的优势,可以获得较好的任务调度结果,能够解决SWIM资源共享问题,满足用户对服务质量需求,提高了航空运营质量和效率。但QoS-ACO算法在以下方面需要进一步研究和完善。
1) 由于蚁群算法普遍存在过早收敛的现象,尤其是当任务数达到一定数量时,总效用值会过早收敛。因此本文提出的QoS-ACO算法也存在不足,在后续的算法改进中,会借鉴其他启发式算法优点,如模拟退火算法和遗传算法等。根据这些算法的不同特点进行综合应用,优劣互补,提高算法整体任务调度性能。
2) 本文提出的QoS-ACO算法,只考虑了服务质量中的任务完成时间、安全性、可靠性和总效用值这几个方面,还需要更全面地考虑SWIM中的其他QoS需求,以及系统负载均衡等因素,不断地改进和完善任务调度策略。
3) 蚁群算法中参数设置很重要,如果设置不当会导致求解速度变慢,影响结果质量。在下一步的SWIM任务调度研究工作中,还将考虑任务的动态性,动态调整算法中的相应参数。
4) 本文提出的 QoS-ACO算法只是在模拟的SWIM环境下,利用网络仿真工具进行仿真实验,而没有在实际SWIM应用环境下测试。后续工作应在真实的SWIM环境下进行实验测试,进一步验证所提QoS-ACO算法的有效性。
猜你喜欢
计算机测量与控制(2022年2期)2022-03-30
建材发展导向(2021年7期)2021-07-16
中国药学药品知识仓库(2021年18期)2021-02-28
数字通信世界(2020年3期)2020-04-06
少儿美术(2019年7期)2019-12-14
冰雪运动(2018年3期)2018-12-29
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17