基于LM98640的TDI-CCD暗场扣除方法
2019-07-25 10:00:00宁永慧郭汉洲赵庆磊
液晶与显示 2019年6期
宁永慧,郭汉洲,余 达,赵庆磊
(1. 中国科学院长春光学精密机械与物理研究所,吉林 长春 130031;2. 长春国科医工科技发展有限公司,吉林 长春 130031 )
1 引 言
科学级TDI-CCD是航天遥感领域主要应用的一种光电探测器。影响TDI-CCD成像性能的重要参数,如信噪比(SNR)、调制传递函数(MTF)、图像动态范围(DR)等,是空间遥感系统设计领域重要的研究内容。此外,TDI-CCD暗场下的成像性能直接影响图像的动态范围和景物层次的分辨能力,也受到越来越多的关注,成为空间相机的重要设计参数之一。
优化暗场噪声抑制方法,对提升低照度下的景物细节,实现阴影区域、云层下景物的实时成像监测具有重要作用。为了更好地实现对暗场噪声的抑制,研究人员对暗电流的产生机理[1]、信噪比[2]、电路结构[3-4]进行了分析,通过模拟偏置扣除或图像处理[5-7]的方法抑制暗场响应。这些方法重点对系统设计原理和噪声进行了分析,对暗电流的处理方法讨论尚不够深入。
本文基于视频处理器LM98640,设计了一种数字负反馈的模拟处理方法。通过统计暗场下的图像灰度,实时调整LM98640的偏置参数,将模拟扣除和数字处理相结合,实现暗场噪声的电路抑制。
2 TDI-CCD暗场噪声
2.1 暗电流
TDI-CCD暗电流(暗电平)表征的是TDI-CCD无光照条件下产生的电子数。暗场灰度是指CCD相机在暗场成像时,经过AD量化后输出的图像灰度值。从半导体器件角度来看,暗电流是由于光电二极管转移栅的不一致性而产生的直流偏置差异,多表现为固定图形噪声。在工程实践中,通过像元校正可实现噪声抑制。像元校正主要修复像元间差异,而本文讨论的暗场扣除,主要是抑制暗电流的平均值。
暗电流产生的原因主要有以下几点:
(1)耗尽的硅衬底中,电子从价带至导带的本征跃迁;
(2)少数载流子在中性体内的扩散;
(3)Si-SiO2界面引起的暗电流。
因此,暗电流的大小主要和器件温度有关。通常,温度每升高7 ℃,暗电流增加1倍。所以,要保持探测器具有稳定的暗场指标,需要对探测器的工作温度进行严格控制。
TDI-CCD输出图像信号经过预防电路、前置放大电路、视频处理电路后输出数字图像。以TDI-CCD满阱电压2 V为例,若要求暗电流均值低于10 mV,在电路1倍增益、10 bits量化的电子学系统中,量化后的暗场灰度为5 LSB。
根据TDI-CCD探测器设计结构(图1),在有效像元前会有若干暗参考像元用于表征探测器在暗场条件下的响应值。在探测器数据多通道输出结构中,不同通道的暗电流水平会有差异。而受到结构限制,仅有首尾通道能够刻画出真实的暗像元。不同通道的暗参考像元差异,可能导致暗场扣除的效果不同。
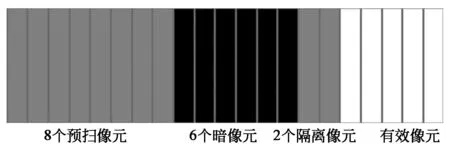
图1 TDI-CCD的像元结构图Fig.1 Pixel structure diagram of TDI-CCD
2.2 暗场噪声扣除的常用方法
暗场噪声扣除可以通过设计视频处理器电路或设置视频处理器工作参数实现。在TDA9965中,通过Vref引脚串联积分电容,实现暗电平的电荷累积,然后通过时序控制,以一行图像为单位,扣除该累计电平,实现暗电流抑制。电路如图2所示。由于每行图像均要扣除当前累积的偏置电平,所以会给图像列向(沿轨方向)带来高频噪声,影响图像的后期处理。
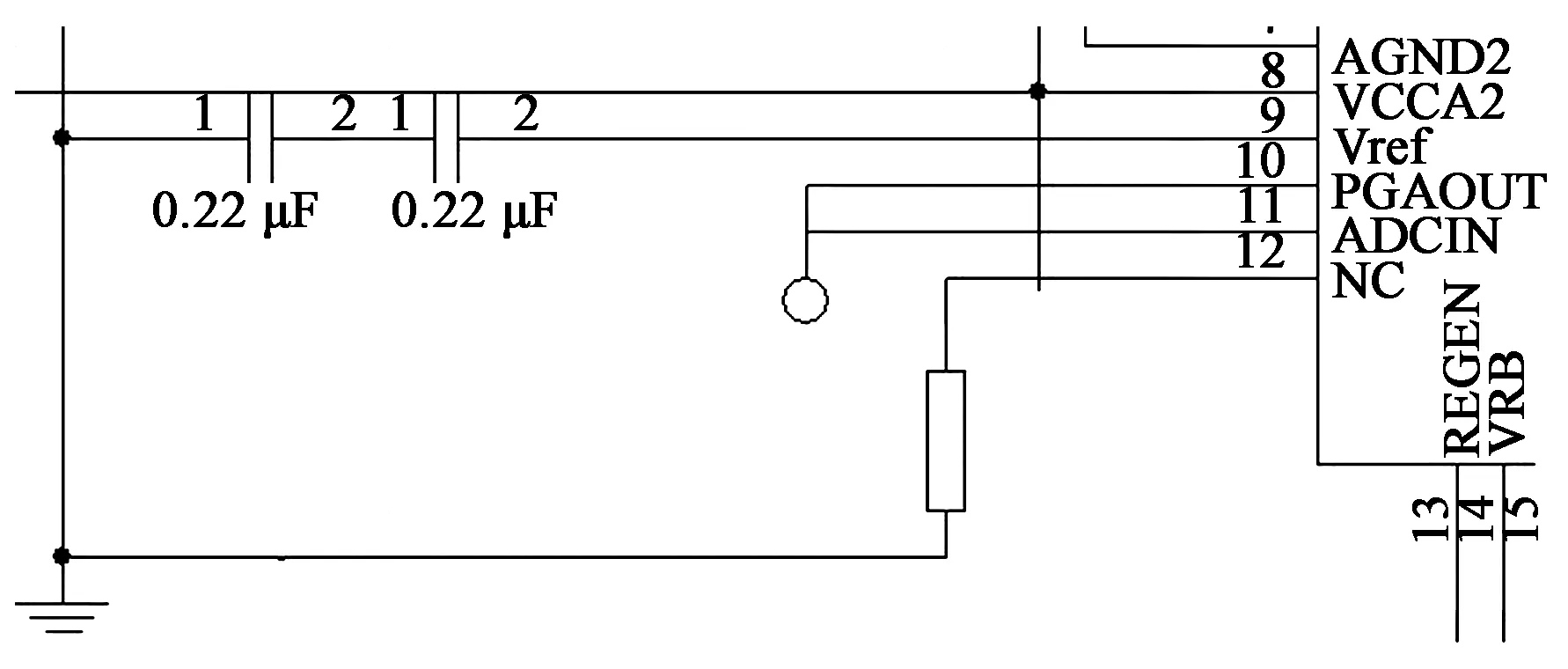
图2 TDA9965的硬件偏置电路Fig.2 Offset circuit of TDA9965
在视频处理器XRD9859中,通过设置芯片自动校正模式实现暗场抑制。该模式仅在上电时,通过设置合适的偏置值,保证探测器具有合理的暗场值。这种方法不能动态抑制暗电流,无法消除暗电流随温度升高而增大所带来的影响。
另一种方法是检测图像灰度,将图像数据和暗场数据分别进行采集,在图像数据中扣除暗场数据,实现暗场数字扣除。数字扣除损失了传感器的真实动态范围,暗电平水平越高,损失的动态范围越大,不利于图像信息保存。
3 反馈式暗场扣除
视频处理器LM98640的暗电流抑制电路,在相关双采样(CDS)模式下,对暗电流校正效果较差。因此,需要设计数字反馈式暗场扣除方法,实现暗电流抑制。
LM98640内部共有64个寄存器,与视频信号处理相关的寄存器有精调偏置寄存器FDAC、粗调偏置寄存器CDAC、增益寄存器PGA。视频信号从采样到输出的处理链路结构如图3所示。
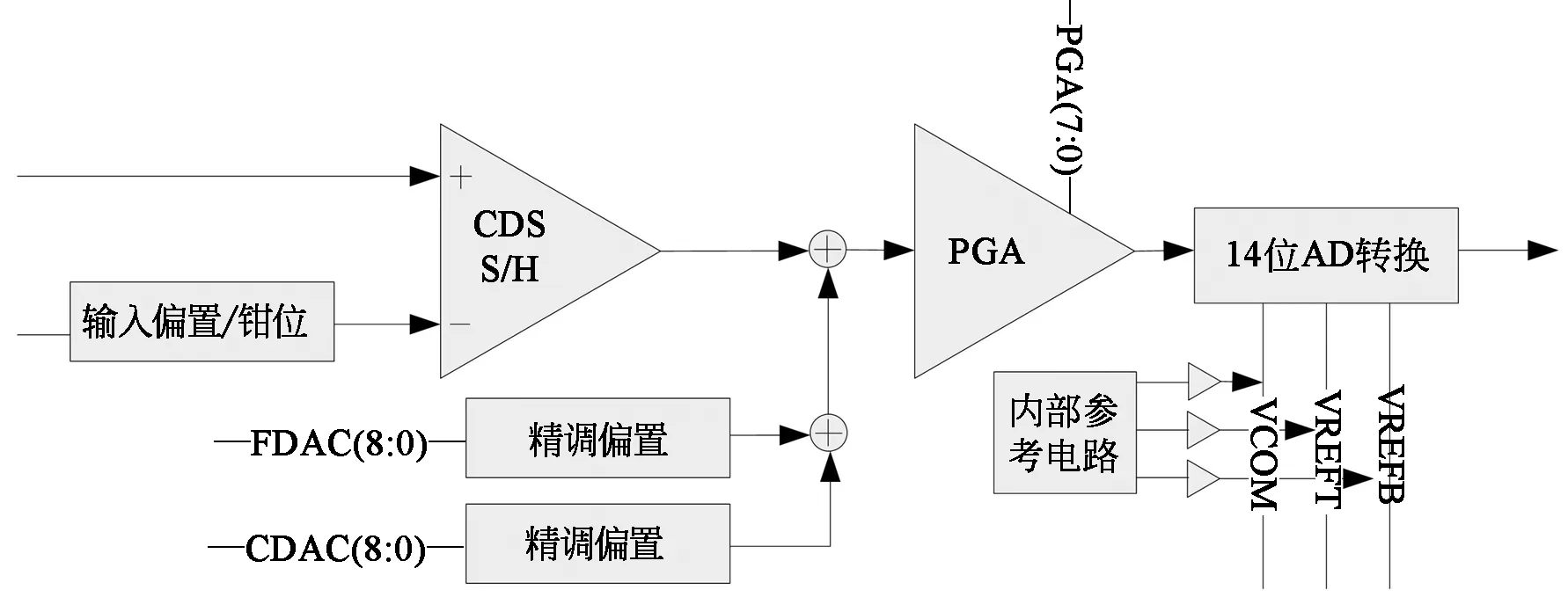
图3 信号处理框图Fig.3 Diagram of image signal processing
暗电流经过CDS后,进行偏置调整,然后通过PGA放大,最后进入ADC单元完成AD转换,获得14 bits量化的图像数据。
CDS模式下可设置1倍增益或2倍增益,当设置为1倍增益时,偏置设置值与输出码值关系如表1所示。

表1偏置参数设置对应关系表Tab.1 Relationship between the offset parameters and the actual voltages
PGA增益码值与增益倍数之间的关系如式(1)所示。式中,G表示增益,Gbin表示增益的二进制码值。
G=180/(277-Gbin)
,
(1)
当CCD探测器的满阱电压大于视频处理器的最大输入电压时,通过设置LM98640偏置寄存器实现暗场扣除,并不损失探测器的动态范围。
反馈式暗场扣除的工作框图如图4所示。

图4 反馈式暗场扣除工作原理Fig.4 Principle of the dark-field offset reduction with feedback type
首先,在当前的增益和偏置参数下,统计暗场图像的灰度均值;然后,通过逆运算,去除增益和偏置影响,估算真实的暗电流水平;最后,通过设置LM98640的偏置值,抑制暗电平。
当设置新的增益和偏置参数后,需要根据当前增益和偏置参数重新估算暗电流水平,并实时更新偏置参数设置。反馈式暗场扣除能够记录暗电流的变化过程,对于后期的图像数据恢复及处理、系统的暗噪声分析等具有良好的应用。该算法以图像帧为单位进行偏置参数设置,也有利于图像细节的保持。
4 算法设计与分析
4.1 自适应偏置调整算法
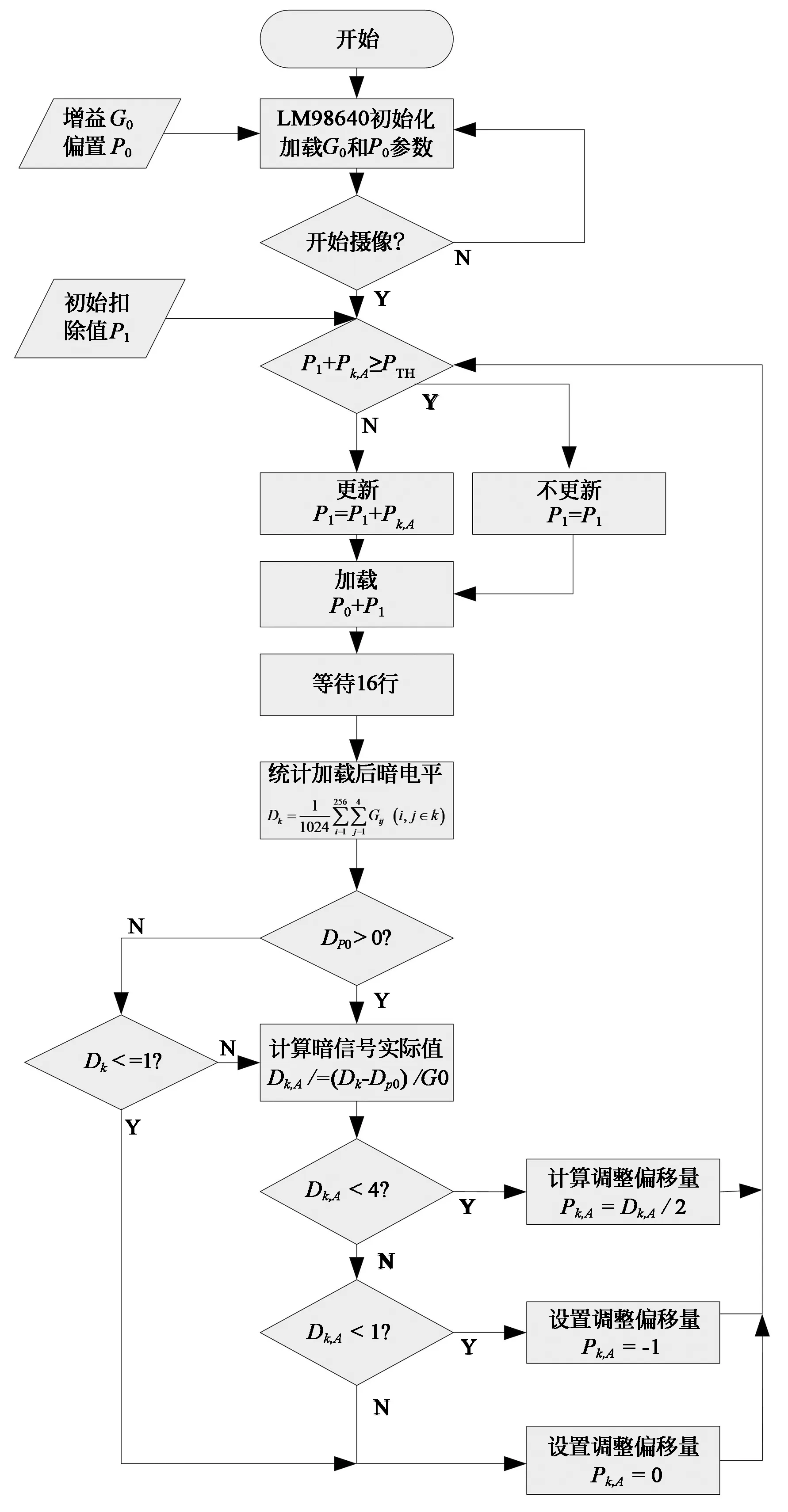
图5 自适应算法流程图Fig.5 Self-adaptive algorithm flow-chart
LM98640的偏置参数区间(000~1FF)包括2部分,其中,000~0FF表示负偏置,100~1FF表示正偏置。在负偏置参数中,将00~60作为暗场扣除参数范围;将00~9F作为加载负偏置参数范围。所以,最终加载的参数值为二者之和。自适应偏置调整的算法流程如图5所示。首先,定义256行CCD图像为一帧,在每行图像中选取4个暗像元,进行暗场灰度均值统计,计算方法如式2所示,其中,Gij表示i行j列暗像元灰度,Dk表示第k帧的暗场灰度均值。
,
(2)
然后,判断初始暗场扣除偏置P1与第k帧的调整扣除偏置Pk,A的累加和是否达到暗场扣除最大值PTH。如果没有,则更新暗场扣除偏置参数P1,如式(3)所示,否则保持为当前值;
P1=P1+Pk,A
,
(3)
最后,将系统加载的偏置参数P0和暗场扣除偏置参数P1累加后加载。
暗电流逆运算过程如式(4)所示,其中,DP0表示与P0对应的图像灰度值,G0表示当前增益值,Dk,a表示新增暗电流对应的灰度值。
调整扣除偏置的计算公式如式(5)所示,根据Dk,a的值,通过设定阈值以及双向调整的方式,实现暗电平微调功能,使暗电平处于合理有效的范围内。
Dk,A=(Dk-DP0)/G0
,
(4)
.
(5)
暗电流计算结束后,等待16行,执行偏置参数加载,然后开始下一帧图像统计。
4.2 数据误差分析
暗电流计算时,误差源主要有以下几点:
(1)偏置参数与图像灰度的映射关系。根据表1所示,粗调偏置的调整步长为1 mV,参数的二进制码值为001,在12 bits AD量化下,对应2个灰度值;因此,映射误差为±1 LSB。
(2)AD量化误差。LM98640产生14 bits量化数据,最大的量化误差为±2 LSB。对于12 bits系统,量化误差为±0.5 LSB。
(3)逆运算误差。根据式(1)和式(5),可得到式(6),逆运算转换为乘加运算。所以,运算误差可以通过数据量化精度控制,在总体误差中可忽略。
Dk,A=(Dk-DP0)/G0=
(Dk-DP0)×(277-Gbin)/180
.
(6)
综上,在12 bits量化下,该算法的总误差为±1.5 LSB。
4.3 算法硬件实现结构
此算法在FPGA硬件平台上实现,通过RS422串行通讯传递LM98640视频参数,并返回LM98640遥测参数和暗场数据扣除信息。通过SPI接口加载LM98640视频参数。在上电时,对LM98640的64个配置寄存器进行初始化,对每片视频处理器进行定制化参数设计。FPGA逻辑设计结构如图6所示。
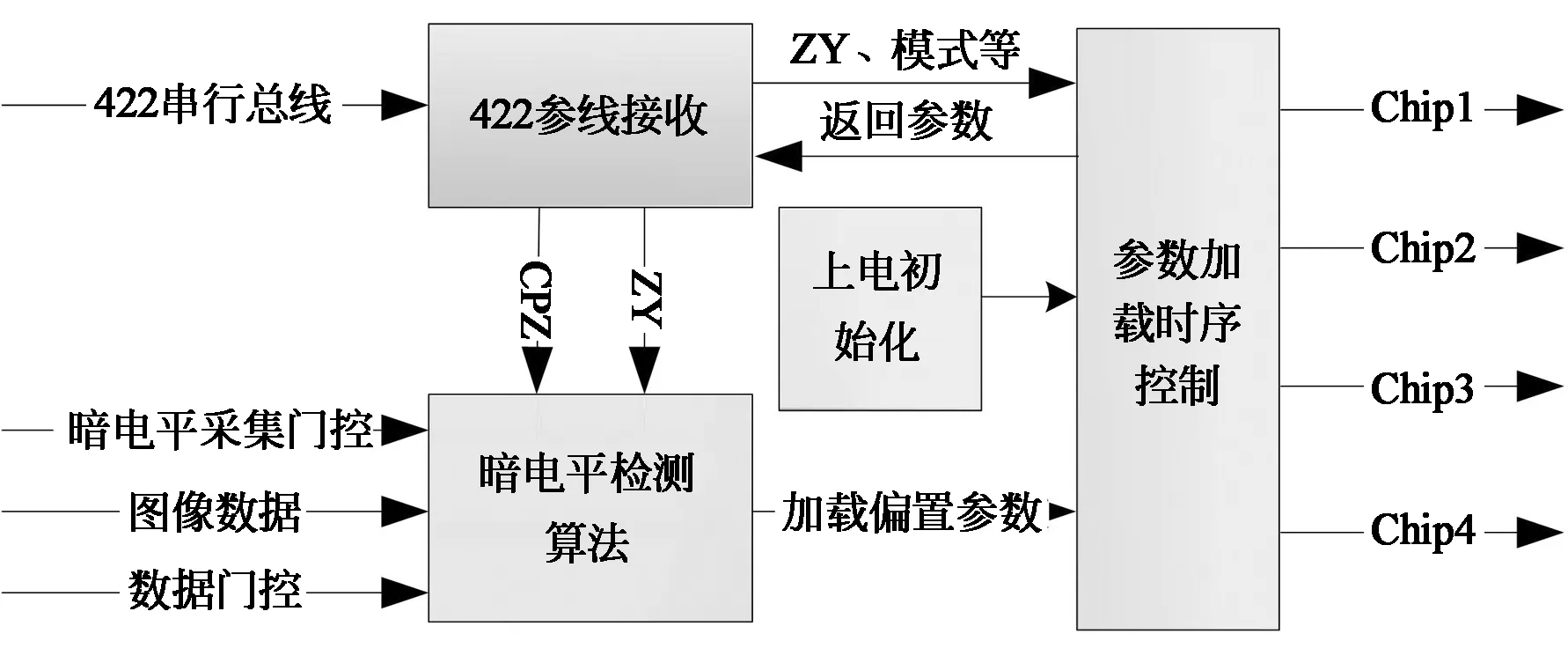
图6 反馈式暗场扣除FPGA逻辑设计结构Fig.6 Logic structure of the feedback type algorithm in FPGA
5 实验结果
该算法主要根据暗场图像灰度,对暗电流进行负反馈式控制调整方法。在试验中,通过采集暗场图像并计算均值,评估算法可行性和可靠性。某相机在焦平面无散热措施条件下,成像10 min,过程中焦平面温度共上升15 ℃左右。每30 s采集暗场图像一次,并计算全视场暗电平平均值的实际情况,如图 7所示。
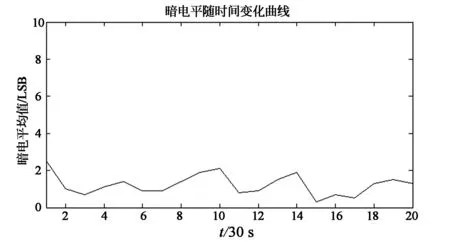
图7 全视场暗电平均值变化情况Fig.7 Changes of the average dark gray values in the whole field of view
10 min内,各片CCD相应通道的暗电平对应的累计偏置扣除值如表2所示。从表中看出,随着TDI-CCD探测器温度升高,各通道暗电平的变化情况不同,其差别产生的主要来源在于暗电流产生的原理和不同通道的温度差异。
表2 不同通道的偏置累积扣除值
Tab.2 Total offset deduction values of differentchannels

CCD通道偏置累积扣除值/Hex 暗场灰度值/LSB 12F9423410433711043198
在计算信噪比时,为更好地表示信号电平,需要扣除暗电平信号,得到真实信噪比,如式(7)所示。其中,uy表示图像均值,uy,dark表示暗场图像均值,σy表示噪声方差。
.
(7)
暗场扣除前后的图像最大信噪比指标(图像灰度在饱和值的50%)如表3所示。由表3可知,暗场扣除后,图像信噪比能够得到提升。
表3 暗场扣除前后的信噪比对比
Tab.3 Before and after SNR comparison of the dark-field reduction algorithm dB

6 结 论
基于反馈式数字暗场扣除方法,集成了模拟暗场扣除和数字暗场扣除的优点。经试验表明,该方法能有效保证图像的暗电流水平,不影响探测器的动态范围,对噪声的抑制有一定的作用。采用FPGA实现算法时,系统量化误差和运算误差在允许范围内,不影响实际的暗场扣除效果。利用LM98640的偏置参数进行偏置扣除,在模拟端扣除的同时,复用了偏置参数功能。该方法在工程实践中得到了有效的应用。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
航天返回与遥感(2020年2期)2020-05-21 00:20:22
汽车实用技术(2018年22期)2018-12-05 22:58:52
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49
客车技术与研究(2016年3期)2016-09-07 03:45:08
电测与仪表(2016年22期)2016-04-12 00:19:58
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电子科技(2014年5期)2014-12-18 11:39:46