图像处理方法用于声压敏感核声图的目标定位
2019-07-22 00:19唐浩许枫杨娟
声学技术 2019年3期
唐浩,许枫,杨娟
图像处理方法用于声压敏感核声图的目标定位
唐浩1,2,许枫1,杨娟1
(1. 中国科学院声学研究所海洋声学技术中心,北京 100190;2. 中国科学院大学,北京 100049)
利用目标前向散射的扰动声线法适用于在浅水信道对目标进行定位,但所得到的声压敏感核声图的交汇效果易受水底地形不匹配的影响,提出了一种基于图像处理的目标定位方法。首先利用多次的单阈值Otsu方法对多阈值Otsu方法进行改进,确定备选区域;然后从备选区域中选择扰动声线穿过最多的区域并计算重心。仿真结果表明该定位方法不但能够正确定位目标,减小人工判断声图的工作量,而且同样适用于声压敏感核声图交汇效果较差的情况,能够辅助人工判断来减少误判。
声呐图像处理;敏感核;小目标定位;多阈值Otsu法
0 引言
收发合置声呐在浅水信道中对小目标的定位能力受到强混响的制约。近年来,国内外开展了很多利用目标的前向散射进行目标探测和定位的研究,通常采用由垂直发射阵和垂直接收阵构成的声屏障系统[1]进行实验。目前用于声屏障系统的定位方法主要有时间反转法和扰动声线法。扰动声线法是一种利用因目标存在而受到扰动的声线所包含的位置信息实现定位的方法。不同学者利用扰动声线所包含的不同物理信息实现目标定位,FOLEGOT[2]利用扰动声线的几何路径实现定位,而MARANDET[3]利用扰动声线的声压敏感核来估计目标位置。敏感核是近年来从地球物理学引入到水声学的,用于描述声场观测量对声场扰动的敏感性和空间特性[4]。声压敏感核声图的质量会受到水底等模型精度的影响,当缺失水底测量数据,将起伏水底近似为平底时,敏感核的交汇效果变差,影响对目标的定位。
Otsu方法[5]计算简单,容易实现,算法稳定性及鲁棒性都优于其他算法。Otsu方法从单阈值被推广到多阈值,但本质上仍然是一种穷举算法,时间复杂度高。目前多阈值分割的优化算法分为两类[6],一类是寻优过程优化算法,即各种群智能算法[7-8],另一类是减小阈值搜索范围的算法。王祥科等[9]先利用独立峰值划分直方图区域,然后在每个小区域内利用Otsu方法得到局部最佳阈值,最后利用松弛因子进一步降低运算量。王磊等[10]逐一确定阈值,每次在类内方差最大的类中利用Otsu方法计算新的阈值,为进一步提高计算速度,利用双峰法确定松弛余量。刘立等[11]引入Nelder-Mead单纯形法优化多阈值Otsu方法。刘艳[12]在划分的直方图区间内利用快速二分法计算阈值来改进多阈值Otsu方法。朱玲羚等[13]针对前视声呐声图的特点,在文献[10]的基础上提出了一种适用于前视声呐图像的多阈值Otsu方法。
本文根据声压敏感核声图的特点,先利用多次的单阈值Otsu方法确定备选区域,再从中选择扰动声线穿过最多的区域,最后计算该区域的重心进行目标定位。仿真结果表明,对于交汇效果较差的声压敏感核声图,该方法也能够较好地实现目标定位。
1 基本原理
1.1 扰动声线声压敏感核的定位原理
射线理论中,对声场的描述是通过声线进行的,把声波的传播看作是一束无数条射线的传播,每一条射线与等相位面垂直,称为声线。从声源出发经过一定的路径到达接收点的声线称为本征声线,本征声线是射线理论描述声场的关键。目标进入探测区域会对原有的部分本征声线产生扰动,引起接收信号幅度、相位等的变化,受目标扰动的本征声线称为扰动声线。扰动声线的声压相对变化如下:
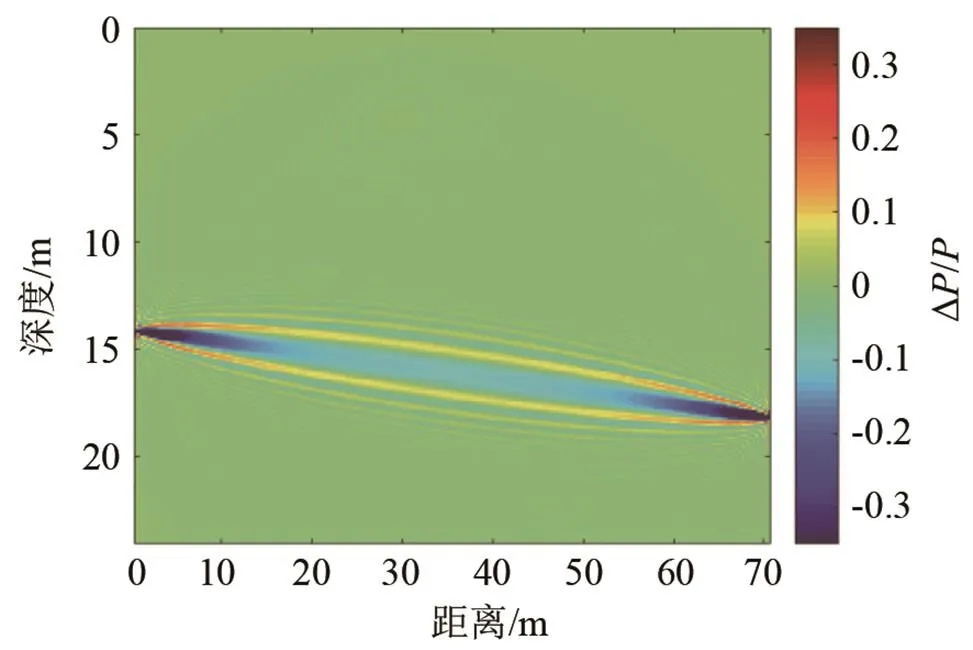
图1 某条扰动声线的声压相对变化
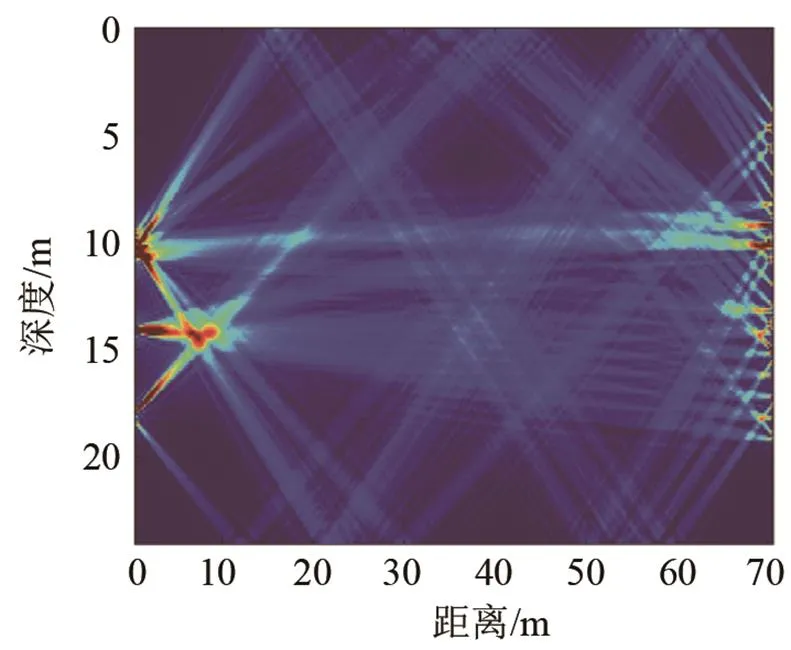
图2 湖试得到的声压敏感核声图及其定位结果
1.2 多阈值Otsu的基本原理
1.2.1 传统多阈值Otsu分割

图像的灰度均值为
类间方差为

1.2.2 多次的单阈值Otsu分割
上述阈值组合需要同时调整达到最佳,以便更合理地体现声图的细节,但最关心的区域是目标所在的灰度区间。由于声压敏感核声图形成的特点,目标区域的像素值在分割后灰度值最大的区间,所以多阈值中最大的阈值是最重要的。为快速确定最大的阈值,利用多次的单阈值Otsu分割进行替代,具体流程如图3所示。
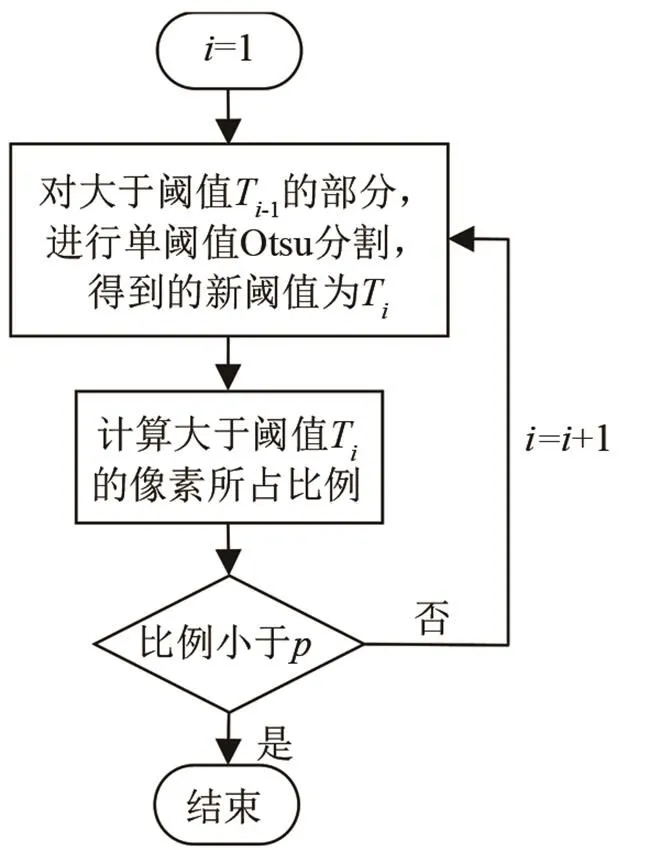
图3 多次的单阈值Otsu分割流程图
2 声压敏感核声图的图像处理方法
2.1 仿真参数
实际应用中,有时不具备测量水底地形的实验条件,这种情况下如果水底起伏不大,可以假设水底为平底,但实际声场的水底地形与计算声压敏感核所用到的平底模型不符,会导致交汇变差,进而影响定位。本文提出的基于图像处理的目标定位方法不仅需要能够处理声图交汇较好的情况,而且需要对上述实际应用中会遇到的情况具有一定的处理能力。实验所用到的刚性垂直阵布放难度大,不便于在很多地点开展实验进行验证,所以本文采用仿真的方式来分析所提出的方法在不同水底地形时的定位效果。仿真参数为:垂直发射阵和垂直接收阵相距71 m,16个发射阵元均匀分布在4~19 m处,16个接收阵元均匀分布在4.2~19.2 m处。目标为半径0.2 m的铁球。声速分布为:水深0~7 m为等声速的表面层,声速为1 452 m·s-1;水深7~15 m为负梯度的跃变层,从1 452 m·s-1变为1 442 m·s-1;水深15 m以下为等温层,声速为1 442 m·s-1。图4为3种不同起伏的水底,起伏范围在23~25 m,当计算声压敏感核时均假设水底为24 m的平底,如图4中虚线所示。由于水底模型存在误差,用于定位的扰动声线中水底反射声线越多,交汇的效果越差,从声图准确判断目标的位置的难度越大。本文分析的均处理此类难度较大的声图的结果。
2.2 声图的处理过程
图5为处理某次湖试数据所得到的声图,从图中可以看出交汇效果较好,容易确定目标位置。但并不是所有情况都能得到交汇较好的声图,有的声图人工也很难做出正确的判断。下面给出基于图像处理方法的声压敏感核声图的处理过程,主要包括以下3步:声图预处理;多次的单阈值Otsu分割;目标区域的确定。其中声图预处理是对发射阵和接收阵附近的盲区进行抑制,增大目标的探测范围;多次的单阈值Otsu分割是处理盲区以外的声图,分割出目标可能出现的位置;确定目标区域是利用声压敏感核声图的特点从上述备选位置选择出最可能出现目标的位置。
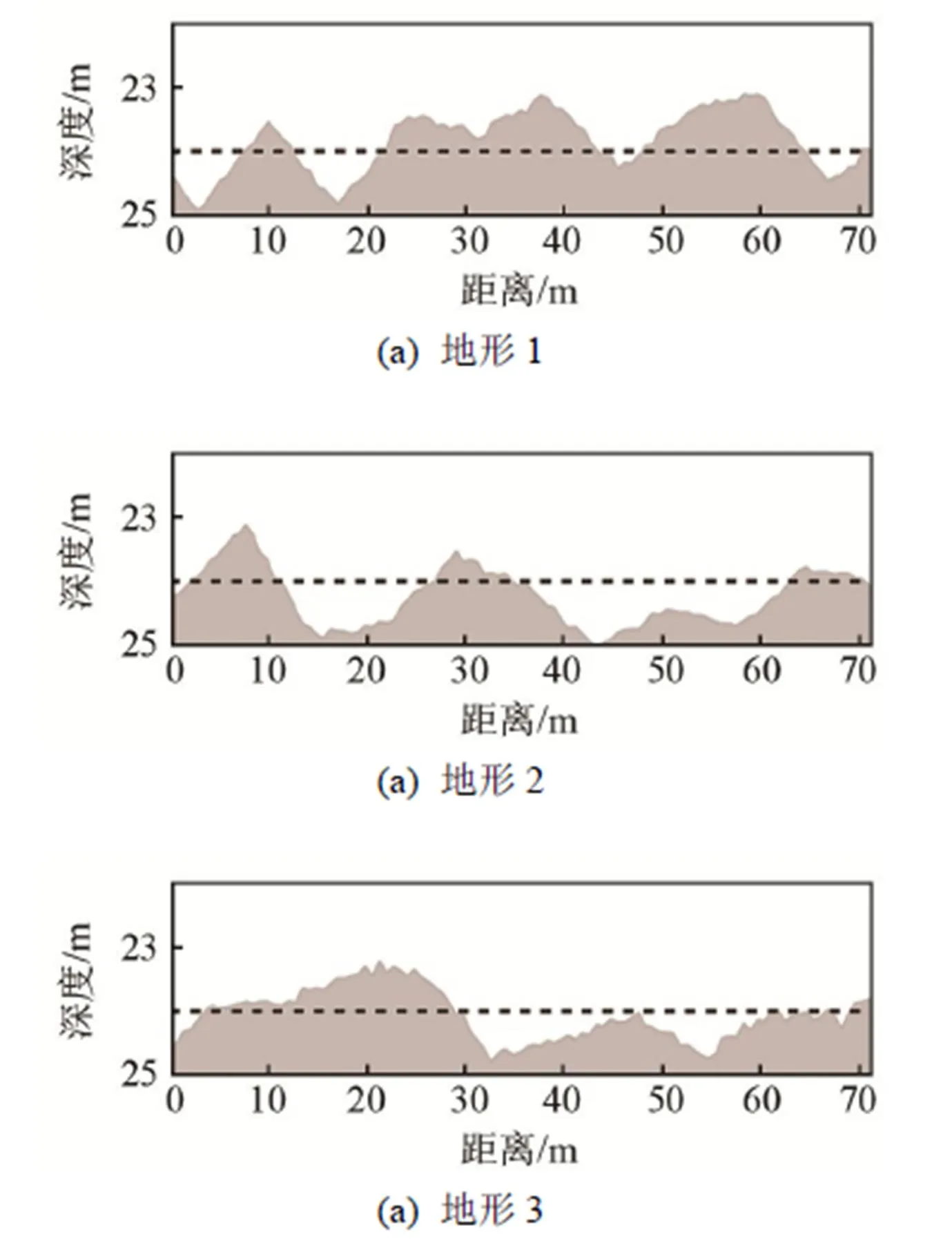
图4 起伏水底的三种不同仿真模型
2.2.1 声图预处理
图5(a)为所有扰动声线的计算结果相加得到的原始声图,存在同一个发射阵元或同一个接收阵元的计算结果相加的情况,因此靠近发射阵和接收阵的位置的计算结果较大。目标出现在上述位置无法进行有效定位,称其为盲区。将相同发射阵元和相同接收阵元的计算结果合并,结果分别如图5(b)和5(c)所示,可以发现合并发射阵元的声图在发射阵一侧的盲区减小了;合并接收阵元的声图在接收阵一侧的盲区减小了。最后将二者按距离加权,得到如图5(d)所示的预处理结果,可见发射和接收的盲区同时受到了一定的抑制。通过对声图进行预处理,可以增大对定位目标的探测范围。
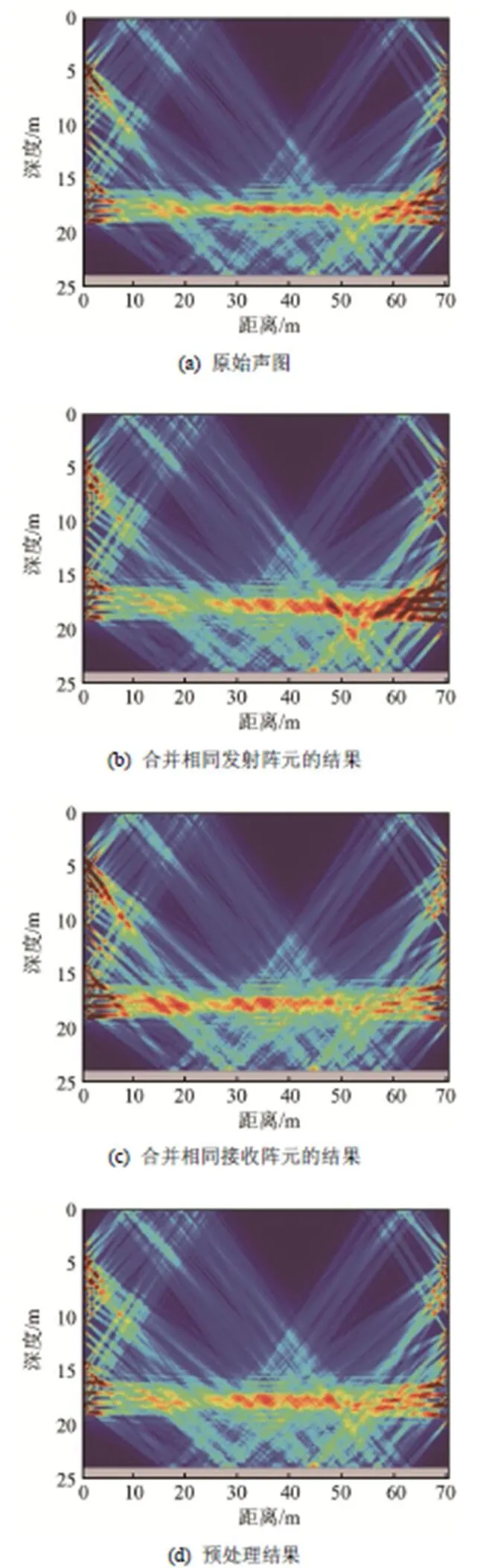
图5 声图预处理的过程
2.2.2 多次的单阈值Otsu分割
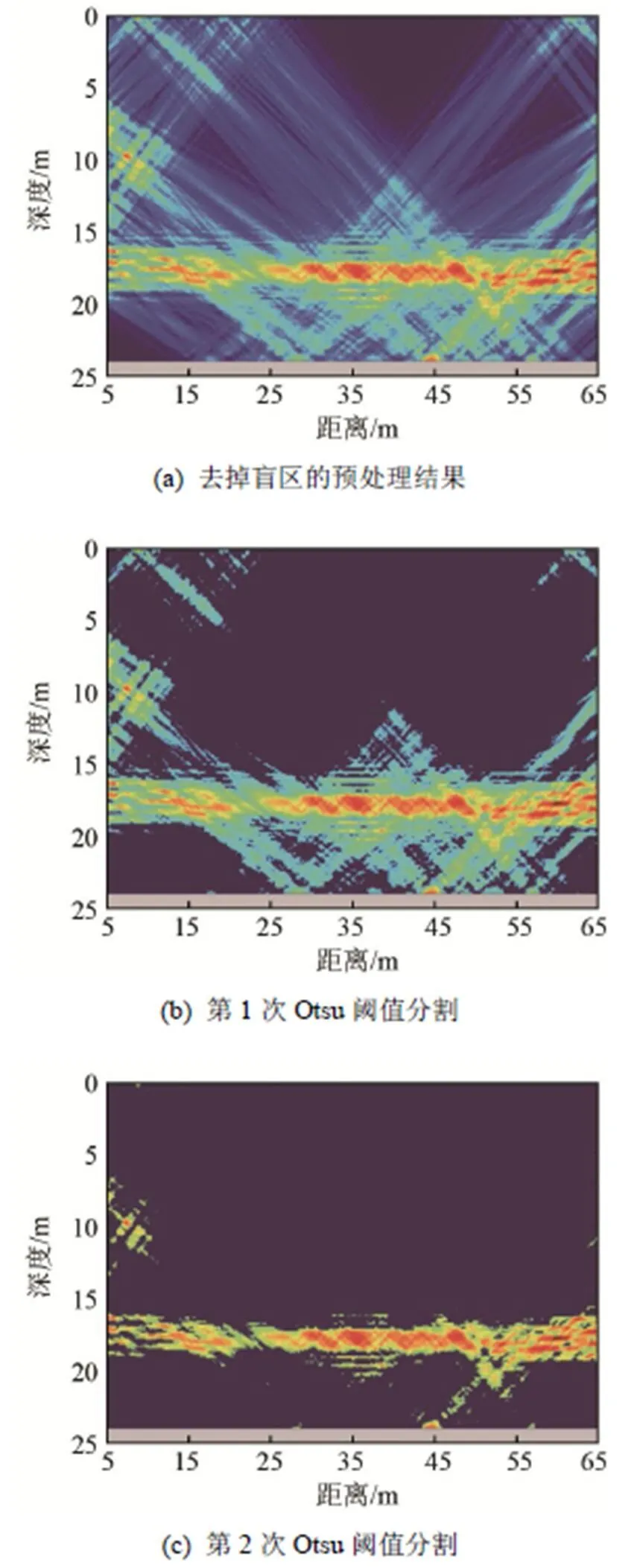
声图预处理虽然在一定程度上抑制了盲区,但盲区仍然存在。图6(a)为去掉盲区的预处理结果(图5(d)中5~65 m的结果)。利用1.2.2节中所述多阈值Otsu的改进方法对预处理结果进行分割,结果如图6(b)~6(d),对应的阈值分别为:0.054 9,0.094 1和0.145 1。可以发现随着循环次数的增加,阈值不断提高,分割出区域的面积逐渐缩小,直到面积小于一定比例,把分割出的区域当成备选区域作为下一步的输入。观察图6(c)和6(d),发现控制循环次数的比例值的合理范围较宽泛,不易发生循环次数过多或不足的情况。
2.2.3 确定目标区域
声压敏感核声图是所有扰动声线的计算结果相加后得到的,每条扰动声线是受到目标扰动的本征声线,其保留的计算结果的位置是目标可能出现的位置,所以所有扰动声线应该在目标位置交汇。由于受水底地形不匹配的影响,声压敏感核声图的交汇效果变差,通过预处理和分割处理会得到几个备选区域,根据声压敏感核声图的形成特点,目标所在的区域应该是通过扰动声线数最多的区域。
去掉图6(d)中联通面积较小的备选区域,结果如图7(a)所示,并对区域进行编号。然后在所有扰动声线中统计通过每个编号区域的数量,将通过声线数量最多的区域确定为目标区域。图7(a)中4个区域通过声线的数量分别为:24、22、18和17,所以最终确定区域1为目标区域,计算目标区域的重心便可得到目标坐标。图7(b)、7(c)分别为通过图7(a)中区域1和区域4的扰动声线,可以观察到通过区域1的声线多于通过区域4的声线。
2.3 处理结果
图5~7为利用本文所述方法对图4中的水底地形1进行声图预处理、多次的单阈值Otsu分割和目标区域确定的结果。图8为利用本文方法处理其他水底地形的定位结果,图8中实际水底地形用黑色线表示,近似的平底用灰色表示,实际目标位置用蓝色五角星表示,定位结果用蓝色三角表示。由于水底模型的近似,交汇效果并不理想,人工判断图8(a)也容易出现误判,而利用本文方法能够正确判断目标的大致位置,可以用于辅助人工判断。3种水底地形的定位结果见表1,在不同的地形近似下,定位误差的大小不同。
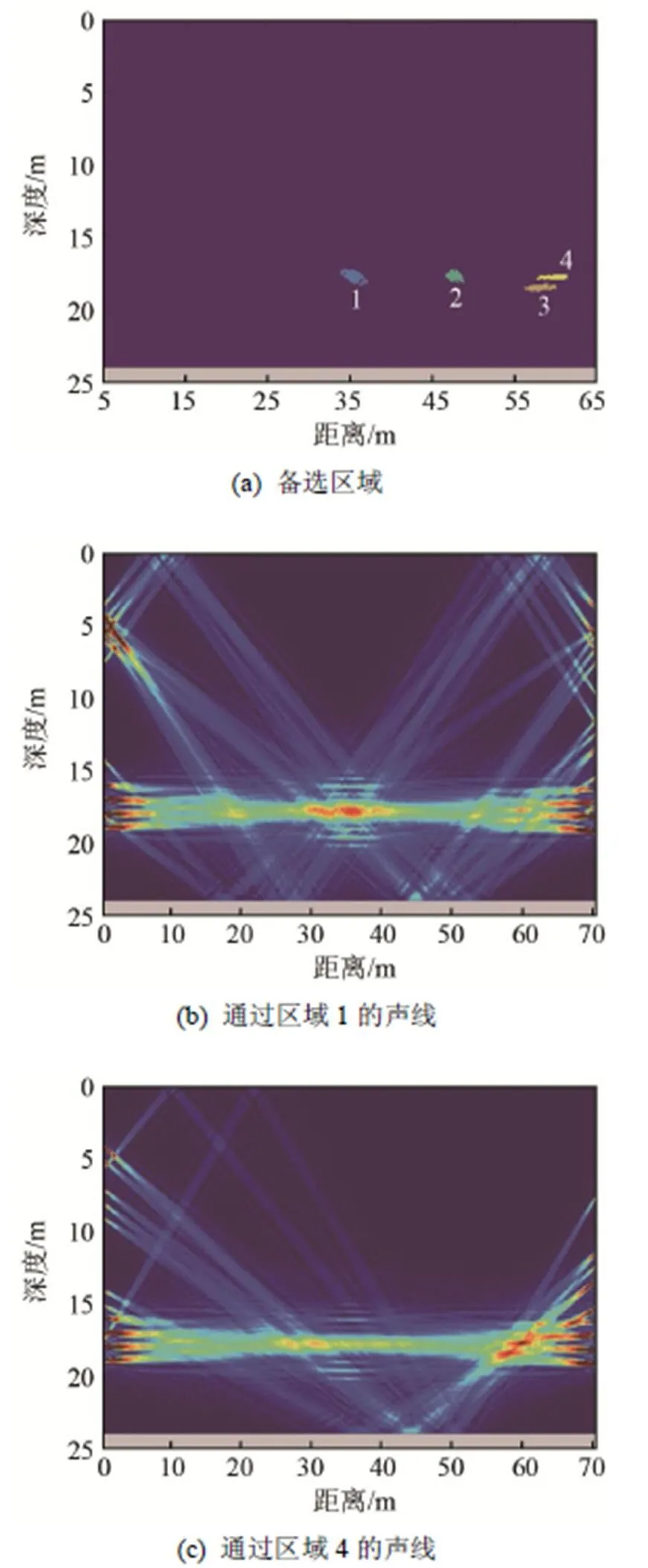
图7 确定地形1的目标区域
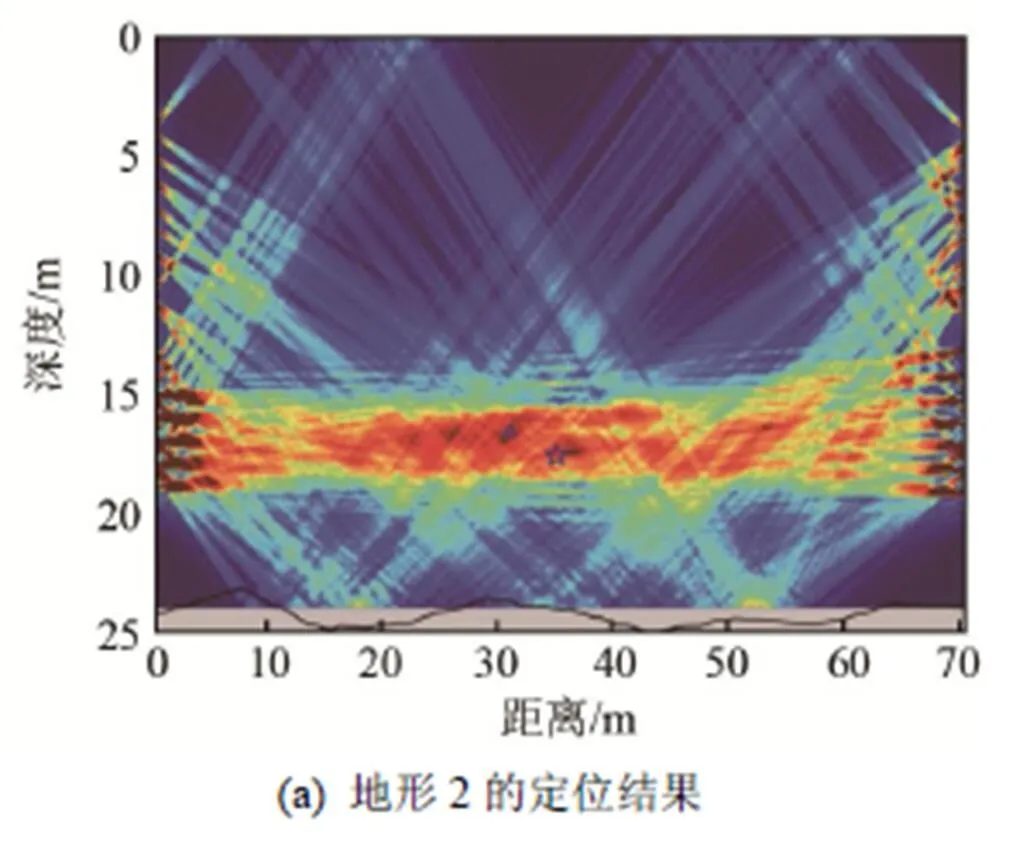
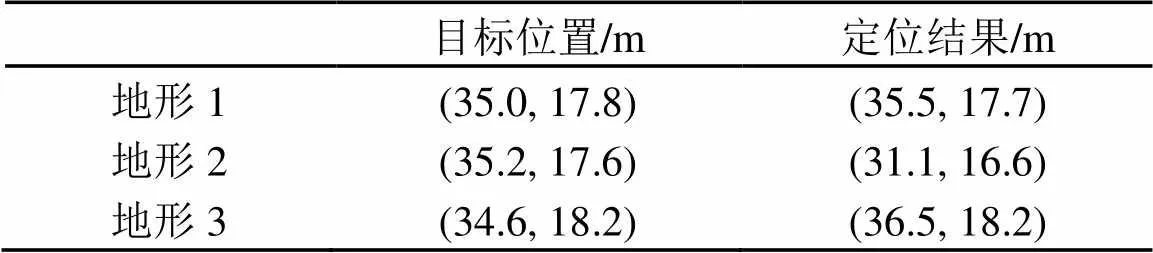
表1 三种不同水底地形的定位结果
3 结论
本文根据声压敏感核声图的特点,提出了一种基于图像处理的目标定位方法。首先通过预处理抑制发射和接收的盲区,然后提出了适用于声压敏感核声图的多阈值Otsu改进方法,分割声图得到备选区域,最后统计穿过各备选区域的扰动声线数量进行再次选择,并计算最终区域的重心。本文仿真了3种不同起伏水底近似为平地时所得到的声压敏感核声图,并利用所提出的图像处理方法进行处理。仿真结果表明,该定位方法不但能够正确定位目标,减小人工判断声图的工作量,而且适用于声压敏感核声图交汇效果较差的情况,能够辅助人工判断以减少误判。
[1] SONG H, KUPERMAN W A, HODGKISS W S, et al. Demonstration of a high-frequency acoustic barrier with a time-reversal mirror[J]. Oceanic Engineering, IEEE Journal of 2003, 28: 246-249.
[2] FOLEGOT T, MARTINELLI G, GUERRINI P, et al. An active acoustic tripwire for simultaneous detection and localization of multiple underwater intruders[J]. J. Acoust. Soc. Am., 2008, 124(5): 2852-2860.
[3] MARANDET C, ROUX P, NICOLAS B, et al. Target detection and localization in shallow water: an experimental demonstration of the acoustic barrier problem at the laboratory scale[J]. J. Acoust. Soc. Am., 2011, 129(1): 85-97.
[4] 温凤丹, 林巨. 浅海环境下的声学灵敏度核函数研究[J]. 南京大学学报(自然科学版), 2017, 53(1): 135-143.
WEN Fengdan, LIN Ju. The study of sensitivity kernels in shallow water environments[J]. Journal of Nanjing University (Natural Sciences), 2017, 53(1): 135-143.
[5] OTSU N. A threshold selection method from gray-level histograms[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1979, 9(1): 62-66.
[6] 申铉京, 刘翔, 陈海鹏. 基于多阈值Otsu准则的阈值分割快速计算[J]. 电子与信息学报, 2017, 39(1): 144-149.
SHEN Xuanjing, LIU Xiang, CHEN Haipeng. Fast computation of threshold based on multi-threshold Otsu criterion[J]. Journal of Electronics & Information Technology, 2017, 39(1): 144-149.
[7] 吴鹏. 萤火虫算法优化最大熵的图像分割方法[J]. 计算机工程与应用, 2014, 50(12): 115-119.
WU Peng. Image segmentation method based on firefly algorithm and maximum entropy method[J]. Computer Engineering and Applications, 2014, 50(12): 115-119.
[8] 董本志, 蔡文宇, 景维鹏. 自然场景图像中叶片区域快速多阈值提取方法[J]. 计算机工程与应用, 2017, 53(22): 198-203.
DONG Benzhi, CAI Wenyu, JING Weipeng. Fast multi-threshold extraction method of leaf region in natural scene image[J]. Computer Engineering and Applications, 2017, 53(22): 198-203.
[9] 王祥科, 郑志强. Otsu多阈值快速分割算法及其在彩色图像中的应用[J]. 计算机应用, 2006, 26(z1): 14-15.
WANG Xiangke, ZHENG Zhiqiang. Fast Otsu multi-threshold segmentation algorithm and its application in color image[J]. Computer Applications, 2006, 26(z1): 14-15.
[10] 王磊, 段会川. Otsu方法在多阈值图像分割中的应用[J]. 计算机工程与设计, 2008, 29(11): 2844-2845.
WANG Lei, DUAN Huichuan. Application of Otsu' method in multi-threshold image segmentation[J]. Computer Engineering and Design, 2008, 29(11): 2844-2845.
[11] 刘立, 焦斌亮, 刘钦龙. Otsu多阈值算法推广实现[J]. 测绘科学, 2009, 34(6): 240-241.
LIU Li, JIAO Binliang, LIU Qinlong. Promotion and realization of Otsu multi-threshold segmentation method[J]. Science of Surveying and Mapping, 2009, 34(6): 240-241.
[12] 刘艳, 赵英良. Otsu多阈值快速求解算法[J]. 计算机应用, 2011, 31(12): 3363-3365.
LIU Yan, ZHAO Yingliang. Quick approach of multi-threshold Otsu method for image segmentation[J]. Journal of Computer Applications, 2011, 31(12): 3363-3365.
[13] 朱玲羚. 基于Otsu法的声呐图像多阈值分割方法[J]. 水雷战与舰船防护, 2016, 24(4): 68-71.
ZHU Lingling. Multi-threshold segmentation method of sonar image based on Otsu method[J]. Mine Warfare & Ship Self-defence, 2016, 24(4): 68-71.
Target localization based on pressure sensitivity kernel sonogram processing
TANG Hao1,2, XU Feng1, YANG Juan1
(1. Ocean Acoustic Technology Center, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China;2. University of Chinese Academy of Sciences, Beijing 100049, China)
Perturbed eigenrays method using target forward scatting is suitable for target localization in shallow water waveguide. However, on the sonogram, the intersection of pressure sensitivity kernels is easily affected by bottom model mismatch. To solve this problem, this paper proposes a method of target localization based on sonogram processing. Instead of multi-threshold Otsu method, this work determines alternative areas by applying single threshold Otsu method repeatedly, and then computes the gravity center of the area with most perturbed eigenrays. Simulation results suggest that this method can not only locate targets precisely and reduce manual workload when the sonar image is clear, but also help make decisions when the intersection of perturbed eigenrays is complicated.
sonogram processing; sensitivity kernel; small target localization; multi-threshold Otsu method
TP391.4
A
1000-3630(2019)-03-0263-07
10.16300/j.cnki.1000-3630.2019.03.005
2018-03-02;
2018-04-15
中国科学院战略性先导科技专项(XDA13030604)、自然科学基金项目(11404365)
唐浩(1990-), 男, 黑龙江哈尔滨人, 博士研究生, 研究方向为水声信号处理。
许枫, E-mail: xf@mail.ioa.ac.cn
猜你喜欢
鸭绿江(2022年10期)2022-10-21
数学物理学报(2022年4期)2022-08-22
机械设计与制造(2022年4期)2022-04-28
汽车工程(2018年12期)2019-01-29
小朋友·快乐手工(2018年9期)2018-12-20
中国舰船研究(2017年4期)2017-08-05
优雅(2017年3期)2017-03-09
铁道标准设计(2015年9期)2015-11-25
语文知识(2015年11期)2015-02-28