码垛机械手在润滑油行业的应用
2019-07-19 08:53张慎靖付晓先
石油商技 2019年3期
张慎靖 付晓先
中国石化润滑油有限公司
机械手是模仿着人手的部分动作,按设定的程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置,在工业生产中应用的机械手被称为工业机器手。工业机械手可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在自动性、智能性和适应性。近几年来,随着中国润滑油行业的不断发展以及生产技术装备的不断革新,码垛机械手在20 L桶和小包装纸箱的码垛工序中得到了广泛应用,逐步替代了传统机械码垛方式。码垛机械手较原来的框架式码垛机,在效率、空间利用、灵活多变性以及经济性方面都有较为明显的优势。
码垛机械手与传统框架式码垛机比较
传统框架式码垛机(图1)虽然也有过辉煌的时期,但相较码垛机械手(图2)来说,占用空间大、通用性差、机构复杂、码垛摆放形式固化、能耗高、维修量大。在当前润滑油生产追求多批次、小批量、订单化的大形势下,传统框架式码垛机越来越不能适应润滑油包装的实际需求,逐渐被淘汰和替换。
最早将工业机器人技术用于物体的码放和搬运的国家是日本和瑞典。20世纪70年代末,日本第一次将机器人技术用于码垛作业[1]。码垛机械手具有作业高效、码垛稳定等特点,已在各个行业的包装流水线中发挥了强大作用。其主要优点有:
◇占地面积小,动作范围大,可减少场地源浪费;
◇生产效率高,可以解放繁重体力劳动,实现“少人”或“无人”操作;
◇市场柔性高,适应性强,可实现不同物料码垛;
◇能耗低,可降低运行成本;
◇定位准确,稳定性高。
鉴于以上优点,码垛机械手在汽车、物流、家电、医药、食品饮料、液体灌装等各类生产线中间环节得到了广泛应用。特别是近几年来,润滑油生产的自动化要求越来越高,码垛机械手迅速进入润滑油行业,并呈现出良好的适应性,逐渐受到各润滑油生产企业的追捧。

图1 框架式码垛机示意

图2 码垛机械手示意
码垛机械手的组成
通常码垛机械手主要由机械手本体、机械手爪、基座、控制系统、示教器等部件组成,再加上托盘的分拆、定位及输送机构,从而组成一个完整的码垛系统。码垛机械手的组成见图3。
机械手本体
机械手本体通常指机械手臂、手腕和基座,它是机械手的主要部分,多采用优质轻巧的铸铝材料制造和连杆式关节型的机构形式,具有较高的机械性能和抗震能力[2]。目前,应用于润滑油行业的机械手多采用关节式机械手,关节式码垛机械手常见本体多为4轴,亦有5、6轴码垛机械手,美国润滑油制造商JTM公司就采用Motoman Model UP165型6轴机器人用于箱装和桶装润滑油的码垛[3]。主流码垛机械手本体见图4。
机械手爪(末端执行器)
机械手爪也称作末端执行器,作为码垛机械手的重要组成部分之一,其对码垛机械手的整体工作性能具有非常重要的意义。根据不同的产品,可设计不同类型的机械手爪,使得码垛机械手可高效的完成码垛工作。
常见码垛机器手的机械手爪包括吸附式、夹板式、抓取式、组合式,见图5。在润滑油码垛行业主要采用抓取式和夹板式,分别实现对20 L桶和纸箱的抓取。
抓取式手爪是一种可灵活适应于不同口径不同高度的润滑油中桶码垛的抓取工具,与转桶机构配合可以实现桶标的一致性码放。
夹板式手爪是纸箱码垛过程中最常用的一类手爪,常见类型有单板式 、双板式和多板式,主要用于润滑油小包装线整箱码垛。夹板式手爪加持力度可以通过减压阀调整,两侧板光滑不会损伤码垛产品外观质量,为防止纸箱滑落,侧板一般都会有可旋转爪钩。
码垛机械手的运行
码垛机械手运行步骤
码垛机械手在自动模式启动后,需要和输送系统自动交换信号来完成系统的整体运作。一般来说,机械手完成零点定位后,要实现从纸箱抓取到码放完成需要以下几个步骤:
◇确定机械手待抓位置;
◇手爪下降到抓箱高度;
◇实现夹板平移待抓;
◇实现夹板的夹持动作;
◇手爪升高到超越障碍高度;
◇实现过程移动;
◇到待落位置;
◇完成纸箱摆放;
◇实现高度提升;
◇实现返回零点。
码垛机械手运行控制程序

图3 码垛机械手组成示意

图4 主流码垛机械手本体
一般来说,码垛机械手可以满足1~2条灌装线的码垛。一对一的码垛程序相对简单,而一对二的码垛程序则较为复杂。要实现一台码垛机械手对两条灌装线的同时码垛,就需要一个基本的程序架构:即一个主程序和两个子程序。主程序用于定义A、B两条灌装线的不同码放排数,实现和外围配套系统的条件交换,针对不同的条件调用子程序。子程序分别实现A、B灌装线的码放过程,主要实现不同箱型的尺寸定义、码放形式的定义,实现码放分解过程、判断是否满垛,以及满垛后通过主程序实现排垛过程等。码垛机械手程序逻辑流程见图6。
需要说明的是,现在的工业码垛机械手基本都具有了智能识别能力,不同型号的码垛机械手严格限制了抓取重量,并可以通过自适应学习准确计算出抓取物的重量,对不同重量的抓取物匹配精确的扭矩轨迹,当码放过程中出现碰撞或其他异常时可实现自动停机报警。通常在码垛机械手的工作区域一般要求配置防护网或有光栅保护,防止操作人员误入引起人员伤害。
码垛机械手选型的一般原则
在润滑油行业,码垛机械手主要用于实现20 L桶的码桶作业和1 L~6 L桶的码箱作业,选型主要考虑码垛机械手的承载能力和到达距离。承载能力包含手爪的重量和抓取物的重量,到达距离是指机械手臂所能到达的范围。以润滑油行业最常使用的ABB码垛机械手IRB460和IRB660为例:IRB460承载能力110 kg,到达距离2.4 m;IRB660承载能力有180 kg和250 kg 2种规格,到达距离3.15 m,以上2种码垛机械手非常适合应用于袋、盒、纸箱、瓶等包装形式的物料码垛。若受任务限制,如想实现码垛机械手对两条或多条生产线的码垛,需要首先考虑码垛机械手的到达距离。
码垛机械手技术新发展
机械手本体技术
近几年瑞典 ABB 公司推出了全球最快码垛机器手IRB-460 ,操作节拍可到达2 190次/h,运行速度比常规码垛机器手提升 15% ,作业覆盖半径达到 2.4 m,占地面积比一般码垛机器人节省 20% 。德国KUKA 公司码垛机器手KR 180-2 PA Arctic ,可在 -30 ℃下以 180 kg 全负荷进行工作,且无防护罩和额外加热装置,创造了码垛机械手在寒冷条件下的极限。

图5 常见码垛机械手的机械手爪
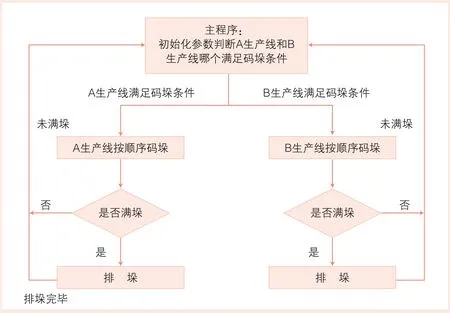
图6 码垛机械手程序逻辑流程
控制系统技术
ABB 公司新出品的 IRC5 控制器,不仅继承了前几代控制器在运动控制、柔性、通用性、安全性、可靠性的优势,且在模块化、用户界面、多机器人控制等方面取得了全新性突破。 KUKA 公司新出品的KRC4 控制器具有高效、安全、灵活和智能化等优点,将安全控制、机器人控制、运动控制、逻辑控制及工艺控制集中在一个开放高效数据标准构架中,具有高性能、可升级和灵活性等特点。
以上设备均在国内润滑油灌装线码垛环节实现了典型应用。
结束语
随着机械手技术的不断进步和国内工业现场的普遍需求,机械手的生产成本必然出现规模化的下降,而国内人力成本的不断高涨更会推动机械手在润滑油生产环节的普及,未来除了码垛工序外,在自动上桶、自动上盖、自动分拣、自动装箱等工序都可实现机械手对人和传统机械机构的替代,很值得大力研究和推广。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
电子制作(2019年20期)2019-12-04
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
弹箭与制导学报(2017年1期)2017-06-23
钟表(2015年3期)2015-12-16
中国中医药现代远程教育(2014年20期)2014-03-01