
气动位置控制系统分数阶控制器的设计与仿真
2019-07-18 11:11:54
液压与气动 2019年7期
(合肥工业大学 机械工程学院,安徽 合肥 230009)
引言
随着工业自动化的发展,气动伺服技术以其价格低廉、结构简单、无污染、操作方便易维护等优点得到了越来越广泛的应用。但受到如气体的可压缩性、控制阀气体流量的非线性、气缸摩擦力等多种因素的影响,使得气动伺服系统具有非线性和低刚度的弱品质[1],这使得气动伺服系统的连续轨迹控制和系统的控制精度具有很大难度。基于气动伺服系统的以上特点,学者们针对气缸摩擦力[2]、比例阀死区补偿[3]等做了大量研究,采用多种新型控制策略以实现对气动伺服系统的精确控制[4-7],并在气动人工肌肉、气动机械手和码垛机等领域得到应用[8-10]。
本研究以气动伺服系统为对象,建立系统的数学模型,设计了一种分数阶PIλDμ控制器,运用稳定裕度法整定分数阶PIλDμ控制器的5个参数,实现对气动伺服系统的位置跟踪控制。
1 系统组成及原理
气动伺服控制系统主要由标准气缸、比例流量阀、位移传感器、压力传感器、数据采集卡和计算机组成,结构图如图1所示。本研究中气缸选用单杆标准气缸DNCI-32-150-P-A,气缸标准行程为150 mm,缸径为90 mm,活塞杆直径为32 mm;比例阀选用MPYE-5-1/8HF-010-B比例方向控制阀。

1.气源 2.过滤调压组件 3.比例伺服阀 4.压力传感器 5.单杆气缸 6.位移传感器 7.数据采集卡图1 气动位置伺服系统原理图
系统的工作原理:由计算机发出待跟踪的控制信号,经D/A转换将数字信号转换为模拟信号后驱动比例阀,比例阀调整开度以控制气缸两腔压力,从而控制气缸活塞位移,将位移传感器检测到的活塞位移模拟信号转换成数字信号后反馈到计算机中,与给定的输入控制信号进行比较得出偏差控制量,再根据偏差控制量调节比例阀开度,如此循环,逐步减小偏差直至为零,最终实现气缸活塞运动对给定输入信号的跟踪[11]。
2 气动位置伺服系统的数学模型
为了便于对气动伺服系统进行数学建模,做出以下假设:
(1) 气动伺服系统的工作介质为理想气体,满足理想气体状态方程;
(2) 比例阀、气缸及气缸两腔之间无气体泄漏;
(3) 比例阀和气缸中的气体是均匀的,同一容腔内气体压力和温度处处相等;
(4) 气体在比例阀和气缸中的流动为等熵绝热过程。
2.1 气缸活塞的力平衡方程
根据牛顿第二定律可得:
(1)
式中,y——气缸活塞位移
m——惯性负载和活塞的质量
Ff——气缸摩擦力
FL——外负载力
p1,p2——气缸两腔的绝对压力值
A1,A2——气缸无杆腔和有杆腔的截面面积
2.2 气缸两腔的流量连续方程
根据质量守恒定律,单位时间内,气缸容腔流入或流出的质量流量等于其质量变化率:
(2)
(3)
式中,qm1,qm2——气体流入气缸两腔的质量流量
m1,m2——气缸两腔的气体质量
ρ1,ρ2——气缸两腔的气体密度
V1,V2——气缸两腔的气体体积
2.3 气缸两腔的压力微分方程
根据热力学第一定律,对气缸两腔有如下的热量方程:
(4)
式中,E——容腔内气体总能量,E=mCpT=
CvpT/R
h——单位质量气体的内能,h=CpT
Cp——气体的定压比热
Cv——定容比热
T——容腔内气体的绝对温度
Q——容腔内气体的热量
(5)
(6)
2.4 比例阀口流量方程
一般采用Sanville流量公式[12]描述气体流动状态,但Sanville流量公式主要针对理想气体通过收缩喷管的一维等熵流动,与实际的气体在阀口流动过程不符。本研究采用BOBROW[13]和陶国良[14]提出的修正公式:
(7)
式中,ps为比例阀上游压力;pd为比例阀下游压力;Cf为临界压力比,上下游压力比大于Cf时,气体达到临界状态以亚声速流动,上下游压力比小于Cf时气体以声速流动,取Cf=0.68;λ为修正指数,λ=0.25;k为绝热指数,工作介质为空气,k=1.4;Ts为绝对温度;A(u)为比例阀开口面积,由控制信号u来控制,一般看成u的二次函数[5],即A(u)=k1u+k2u2。
气缸在一腔充气另一腔排气时,一般充气腔内气体为亚声速流动,排气腔内气体为声速流动。本研究选用的比例阀左、右两腔开口量相同,结合比例阀口面积公式可得比例阀口到气缸的压力流量方程:
(8)


2.5 气动伺服系统的数学模型
结合以上方程,可知气动伺服系统属于非线性系统,对系统进行局部线性化处理以便对系统进行定性分析。
对比例阀流量方程做线性化处理:
qm1=kq1u+kq2p1
(9)
qm2=kq3u+kq4p2
(10)

对上述各式进行拉氏变换,可得系统的线性化数学模型:

(11)
则系统的输入u与输出y的传递函数表达式为:
(12)

根据第一节气缸和比例阀的选型,假设初始状态下活塞在中间位置保持平衡,设定气源压力ps=0.6 MPa,温度Ts=300 K。阀口前后压差Δp=0.02 MPa,黏性阻尼系数Kv=50 N/(m·s-1)[16],负载质量估算为2 kg,气体常数R=287.1 J/(kg·K),带入式(12)可得系统的开环传递函数为:
(13)
3 分数阶PIλDμ控制器的设计
3.1 分数阶PIλDμ控制器的定义
分数阶PIλDμ控制器与整数阶PID控制器相比多了积分系数和微分系数,两者形式相似:
u(t)=KPe(t)+KID-λe(t)+KDDμe(t)
(14)
式中,u(t)为控制器的输出;e(t)为输入;KP,KI,KD分别为控制器的比例增益系数、积分系数和微分系数;λ,μ分别为控制器的积分阶次和微分阶次。
分数阶PIλDμ控制器的传递函数为:
(15)
在分数阶PIλDμ控制器的参数整定中,相比于整数阶PID还需要整定积分阶次λ和微分阶次μ。图2是加入了分数阶PIλDμ控制下的系统结构图。

图2 分数阶PIλDμ控制闭环系统结构图
3.2 稳定裕度法设计分数阶PIλDμ控制器
通常满足相角裕度和幅值裕度都大于0的系统是稳定系统,而相角裕度和幅值裕度往往同时大于0或不大于0,因此要实现稳定裕度的描述只需用相角裕度判别。给出符合控制器设计要求的相角裕度、幅值裕度以及剪切频率,得到满足相角裕度条件和鲁棒性条件的方程。采用该方法需要在剪切频率ωc和穿越频率ωp处满足如下条件[17]:
(1) 在剪切频率处,系统的开环传递函数的模等于1。
|G(jωc)|=1
(16)
(2) 在剪切频率处,系统开环传递函数的相位等于-π+Φm,其中Φm为相位裕度。即:
Arg[G(jωc)]=-π+Φm
(17)
(3) 在剪切频率附近相角的变化率为0。即:
(18)
(4) 在穿越频率出应满足:
Arg[G(jωp)]=-π
(19)
(20)
其中,Am为幅值裕度。
根据以上方程,由稳定裕度法设计的分数阶PIλDμ控制器能实现对系统的有效控制,满足系统的稳定性和鲁棒性要求。
由上一节推导可知,气动位置控制系统的开环传递函数GK(s)的形式为:
(21)
将其转化为频域表达式:
(22)
根据图2,由分数阶PIλDμ控制器传递函数表达式和被控对象传递函数表达式,可得系统的开环传递函数表达式:
G(s)=Gc(s)·GK(s)
(23)
将上式转换成频域形式可得:
G(jω)=Gc(jω)·GK(jω)
(24)
将式(24)分别带入式(16)~式(18)可得参数整定的约束方程:
|G(jω)|=|Gc(jω)·GK(jω)|
=|Gc(jω)|·|GK(jω)|
(25)
Arg[G(jω)]=Arg[GC(jω)]+Arg[GK(jω)]
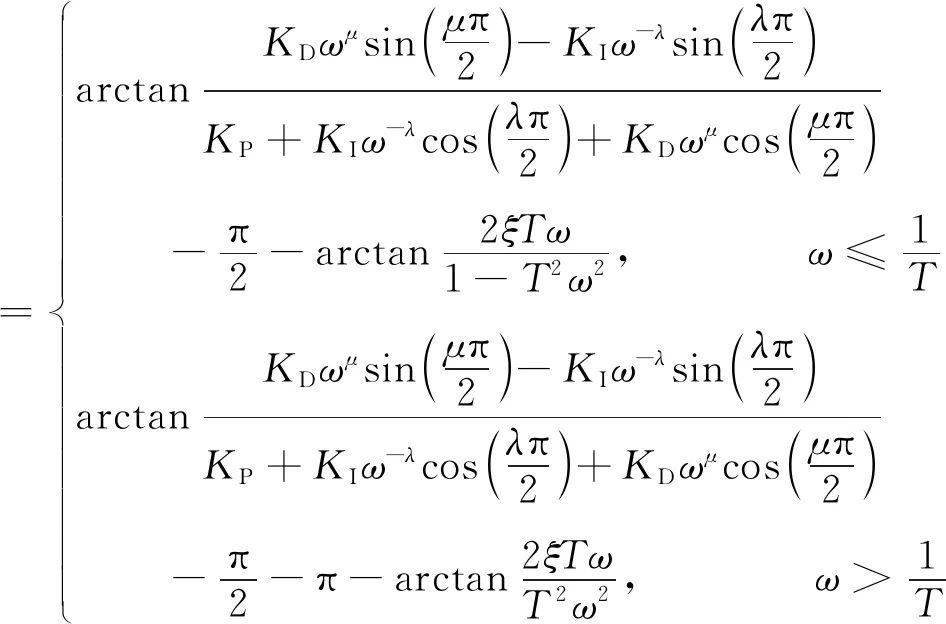
=-π+Φm
(26)
(27)
式中,
根据之前所列方程,使用数值计算、图解计算等方法可以求出分数PIλDμ控制器需要求解的5个参数,但这些方法过程繁琐且误差较大。本研究利用MATLAB优化工具箱的Fmincon函数求解上述非线性方程的最优解。
本研究使用的Fmincon函数语法格式是:
x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)
其中,fun是目标函数;x0为待求参数的初始值;A,b,Aeq,beq分别为线性约束条件不等式系数矩阵,线性约束条件不等式的右值,线性等式约束条件的系数矩阵和线性约束条件等式的右值;lb,ub为x的取值上下限;nonlcon是非线性约束条件函数,它提供非线性不等式和等式约束条件。以上参数若有些不存在则可用空向量或空矩阵代替。
使用Fmincon函数计算分数阶PIλDμ控制器参数时,变量x的矩阵形式为:
x=[KP,KI,KD,λ,μ]
取剪切频率ωc=2.4 rad/s,相角裕度Φm=60°。以式(25)为目标函数,式(26)、式(27)为非线性约束条件,编写求解5个参数的M文件,利用Fmincon函数解得5个参数分别为:KP=9.56,KI=20.076,KD=0.002,λ=0.014,μ=1.971。
4 仿真结果与分析
在Simulink库中自行搭建分数阶PIλDμ模块,其封装子系统如图3所示。建立分数阶PIλDμ控制器的系统单位阶跃响应仿真框图如图4所示。

图3 分数阶PIλDμ控制器封装子模型
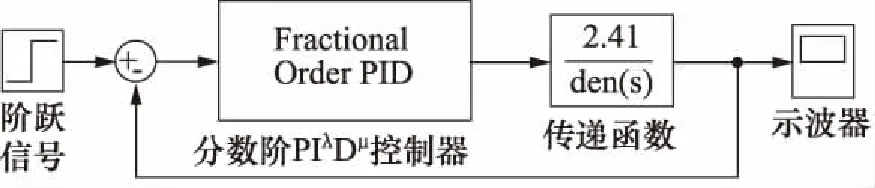
图4 分数阶PIλDμ控制器系统阶跃响应框图
运行仿真程序,仿真时间4 s,得到闭环系统单位阶跃响应曲线如图5所示。分数阶PIλDμ控制性能指标如表1所示。

图5 分数阶PIλDμ控制系统阶跃响应曲线

表1 分数阶PIλDμ控制系统性能指标
由图5的响应曲线可以看出,气动伺服系统在分数阶PIλDμ控制器的控制下,调节时间大幅降低、响应速度加快,超调量很小,系统具有良好的动态特性。
在2 s时加入一个数值为0.2的扰动信号,系统响应曲线如图6所示。分数阶PIλDμ控制系统在受到扰动后能快速恢复到稳定值,系统具有强抗干扰能力。

图6 加入扰动信号时系统响应曲线
当系统特性发生变化,即分别使系统增益增大30%、固有频率和阻尼系数减小30%时,系统单位阶跃响应曲线如图7~图9所示。

图7 增益增大30%系统阶跃响应曲线
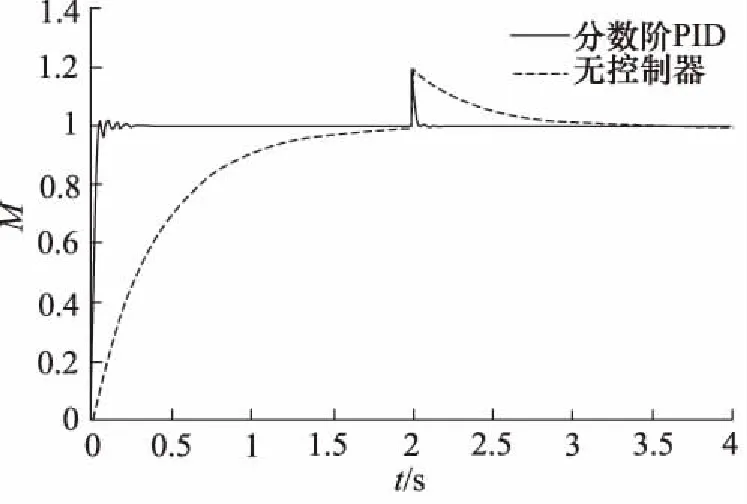
图8 固有频率减小30%系统阶跃响应曲线

图9 阻尼系数减小30%系统阶跃响应曲线
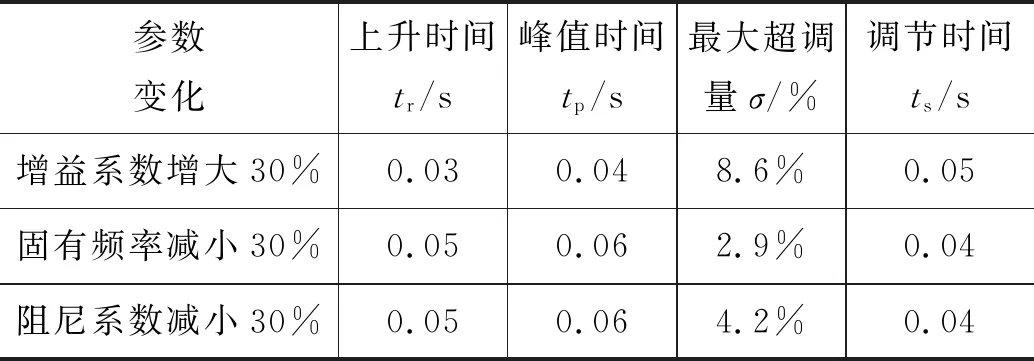
表2 参数改变时系统性能指标
对比表2和表1的性能指标可以看出,当系统参数发生较大变化时,系统性能指标变化较小,分数阶PIλDμ控制方法仍然表现出良好的目标信号追踪特性和鲁棒性,有效地克服了系统不确定性带来的影响。进一步说明对于本研究的气动伺服系统,采用分数阶PIλDμ控制策略可以达到理想的控制性能指标。
5 实验结果与分析
根据原理图搭建气动伺服系统实验装置如图10所示。

图10 实验装置图
在控制界面设置控制器的5个参数如图11所示。其中K0,K1,K2分别表示比例系数、积分系数和微分系数,Ki,Kd为积分阶次和微分阶次。

图11 参数设置图
分别测量分数阶PIλDμ控制气动伺服系统的绝对定位精度和重复定位精度。
绝对定位精度实验:从0位置每次进给20 mm,记录每次到达的位置数据,与设定值比较得出误差值;到达140 mm后每次回退20 mm,记录每次到达的位置数据,与设定值比较得出误差值。结果如表3、表4所示。

表3 进给过程绝对定位精度实验结果 mm
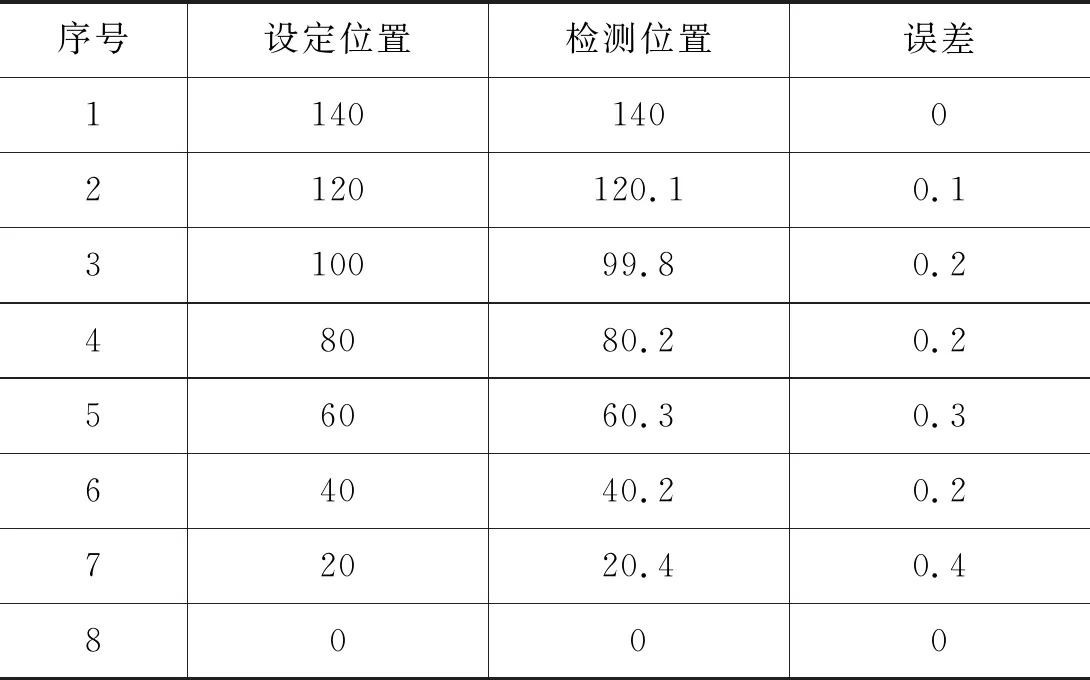
表4 回退过程绝对定位精度实验结果 mm
重复定位精度实验:实验分为进给过程重复定位实验和回退过程重复定位实验两部分。
进给过程实验初始位置分别为10,50,100 mm处,到达位置设定为130 mm处。实验结果如表5~表7所示。

表5 起始位置10 mm mm

表6 起始位置50 mm mm

表7 起始位置100 mm mm
回退过程实验初始位置分别为140,100,50 mm处,到达位置设定为20 mm处。实验结果如表8~表10所示。
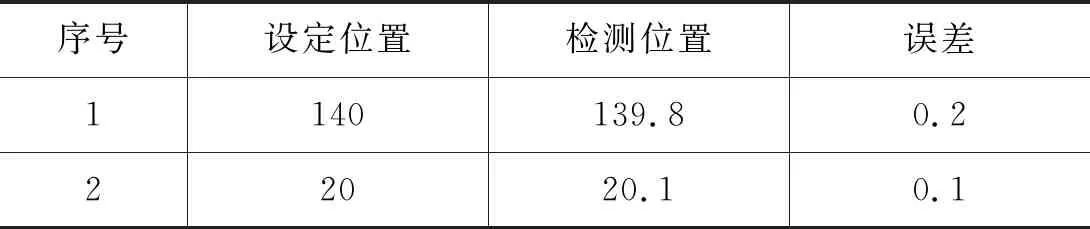
表8 起始位置140 mm mm

表9 起始位置100 mm mm

表10 起始位置50 mm mm
从以上实验可以得出,分数阶PIλDμ控制系统的绝对定位精度为0.5 mm,重复定位精度为0.5 mm。稳态精度较高,本研究设计的分数阶PIλDμ控制策略对于气动伺服系统具有良好的控制效果。
6 结论
对于气动伺服系统,本研究先建立了其数学模型,在此数学模型的基础上设计分数阶PIλDμ控制器,并利用稳定裕度法整定了分数阶PIλDμ控制器的5个参数。在Simulink中的仿真结果表明稳定裕度法整定参数的分数阶PIλDμ控制器能实现有效的位置控制,响应速度快、超调量小,动态性能良好。受到扰动时能在很短时间内恢复到稳定值,使系统具有很强的抗干扰能力。在系统参数发生较大改变时,分数阶PIλDμ控制方法仍能达到良好的控制性能指标。结果表明,分数阶PIλDμ控制器对于气动伺服位置控制系统有良好的控制效果,使系统具有良好的信号跟踪特性、强抗干扰能力和鲁棒性。实验测试采用分数阶PIλDμ控制器的气动伺服系统定位精度达到0.5 mm,系统具有较高的稳态精度。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
测控技术(2018年7期)2018-12-09 08:58:46
测控技术(2018年12期)2018-11-25 09:37:44
光学精密工程(2016年4期)2016-11-07 09:05:39
电测与仪表(2016年2期)2016-04-12 00:24:36
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
核科学与工程(2015年2期)2015-09-26 11:57:13
电测与仪表(2015年5期)2015-04-09 11:30:46
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
电测与仪表(2014年15期)2014-04-04 12:05:34
