
基于BP神经网络的交通流数据融合研究
2019-07-18 02:46董红利
城市建设理论研究(电子版) 2019年3期
董红利
中铁第五勘察设计院集团有限公司 北京 102600
目前常见的交通流数据融合方法是数理统计方法,虽然在数据融合方面有一定的效果,但交通流的随机性导致融合结果达不到理想效果。本文构建了基于BP神经网络模型,对苏州市某一典型路段地磁、线圈、浮动车三者得到的数据进行融合处理,从而得到更可靠的交通流信息。
1 BP神经网络
BP神经网络是一种神经元信号前向传递、误差反向传播优化的多层前馈型神经网络,其网络的传递流程如下:
(1) 输入数据;(2) 设置训练样本和测试样本;(3) 数据归一化;(4) 设置神经网络参数;(5) 训练BP神经网络;(6) 测试BP神经网络;(7) 输出结果。
BP神经网络学习能力强,有较高的容错性,在目前的研究当中,能有效的处理一些复杂的非线性映射关系的数据,是处理交通流数据的重要方法。
2 模型构建
本文确定BP神经网络模型的参数为三维输入,分别为线圈、地磁、浮动车采集得到的数据。由于浮动车只能采集得到交通量的速度,可采用杨涛等提出的三段式速度-流量模型对浮动车数据进行估算。
本文数据融合的具体设计实现过程如下:
(1)BP神经网络输入与输出参数数据
输入参数数据包括:线圈检测器数据、地磁检测器数据、浮动车数据经换算得到数据。
输出数据:经过BP神经网络模型融合后路段的交通量。
(2)输入层包括地磁、线圈、浮动车数据三个参数,输出层是融合之后的一个参数节点,网络采用三层输入。输入层、、分别表示地磁、线圈以及浮动车检测器得到的数据,Q则表示融合之后得到的数据。通过对原始数据进行模型的样本训练,确定权重,然后对BP神经网络模型进行数据融合,并与视频检测器得到的真实数据做对比分析,以R-squared误差、平均绝对百分误差MAPE、均方误差MSE三个误差指标来评价数据融合结果的可信度。
3 实例验证
本文选取某典型路段一日早上7:30到晚上19:30的数据进行融合分析,采集得到的交通量数据以5min为时间间隔,各检测器得到的数据如图2所示。

图1 各检测器流量
由图2可以看出,研究路段当天交通流量整体趋于稳定,早晚高峰特征并不明显,交通流量呈现非线性规律,各个检测器采集得到的结果存在差异性,可进行数据融合处理。
隐含层节点数对训练误差有影响,当隐含层节点数为20时,整个网络训练误差最大;当隐含层节点数为24时,可以得到最小误差,故本文确定隐含层节点数为24。基于实际Matlab操作流程分析,本文确定最优隐含层节点数为24,最优学习率为0.08,训练次数为1000次。
本文基于BP神经网络的多源数据融合结果如下图所示。
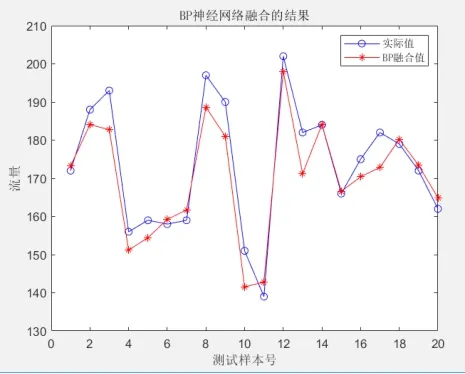
图2 训练集融合结果

图3 融合结果与实际流量
在训练网络的过程中,发现训练集绝对误差不大,表明训练效果良好,故可以对7月22日全天交通流数据进行融合,得到结果如图3所示。可以看出来,基于BP神经网络数据融合方法效果良好,融合值与视频数据实际值较为贴切。融合误差结果:误差为0.87,平均绝对百分误差MAPE为2.69,方根误差MSE为35.8。
4 结论
本文在智能交通的发展背景下,提出了基于BP神经网络的交通流数据融合方法,通过Matlab软件对BP神经网络进行操作处理,在训练误差最优的条件下确定了网络层数、迭代次数、隐含层节点数等网络基础结构,最后通过选取某路段一天的各检测器交通流数据为研究对象,以5min为时间间隔采集交通流流量,得到了较为理想的融合结果,验证了本文基于BP神经网络的交通流数据融合方法的有效性。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
军民两用技术与产品(2022年8期)2022-10-10
中国交通信息化(2022年5期)2022-07-23
中国外汇(2019年19期)2019-11-26
制造技术与机床(2018年11期)2018-11-23
火力与指挥控制(2018年10期)2018-11-13
制造技术与机床(2017年9期)2017-11-27
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
中国医学装备(2016年6期)2016-12-01
