基于元胞自动机的交通流状态研究
2019-07-12 08:43黄何瑶静
城市公共交通 2019年5期
黄何瑶静 黎 婷
(重庆大学建设管理与房地产学院,重庆 400045)
引言
智能交通系统以卡口系统、浮动车数据采集系统为主要智能采集设备。浮动车数据在地理及时空维度呈现稀疏性特点,就城市道路及复杂路网交通流状态而言属主要难题之一,目前较多的研究为基于拓扑关系的度量方式;卡口系统广泛运用于交通规划管理,提供基础运行数据,其数据量呈膨胀增长趋势,目前以相关大数据挖掘算法及时间序列预测模型为主。本文基于浮动车与卡口数据,以深圳市交通实时数据进行交通流状态统计描述,结合多维度信息获得具有时空关联特性的交通流状态描述方法。据此,以重点道路的车流分布时间特点,建立基于matlab的可视化元胞自动机交通流模型,以辅助交通管理部门对于重点道路实时交通状况进行被动决策及拥堵疏散。
1 模型假设
(1)只考虑在单一车道上行驶的车流,不考虑超车情况。
(2)交通流为标准长度的小型、中型汽车在单方向道路上行驶而形成的车流,没有外界因素入岔路、信号灯等的影响。
(3)蓝牌车辆、白牌车辆、其他牌照车辆当量等同于标准小型汽车,黄牌车辆当量等同于标准大型客车。
(4)交通流可近似看作一辆辆汽车组成的连续的流体,可以用流量、密度、速度3个参数描述其基本特性。
(5)不考虑路面情况及车道宽度。
(6)某一路段的平均速度可以用该路段上的车辆平均速度代替。
(7)每辆车随机变道,不考虑超车情况。
(8)每辆车都只受到信号灯及其前后车辆的状态对道路情况做出反应。
(9)交通流的启动、停止速度可以用启动波波速、停止波波速描述。
(10)不考虑突发状况,不考虑人为因素。
2 符号说明
符号说明见表1。
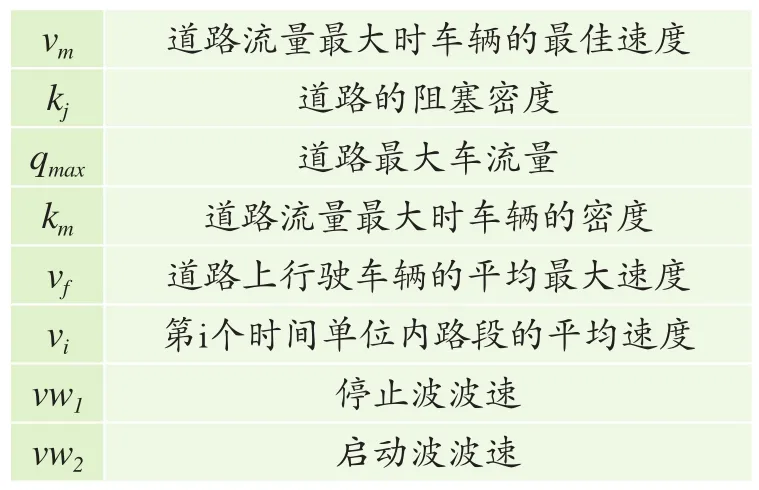
表1 符号说明示意
3 基于浮动车的交通流状态统计
3.1 道路实际通行状态的估算
(1)不同牌照车辆所对应的标准车当量(pcu)。根据蓝牌、白牌、黄牌和其他四种牌照类型分别设置不用的标准车当量,pcu依次为1、1、3.5和1。
(2)道路实际通行状态的数据整理。在不考虑外界因素如岔路、红绿灯等因素的情况下,各路段的交通流状态描述方法相同。我们以2018年3月25日香蜜湖路市委党校路段北行的卡口数据为例,结合当日的浮动车数据进行交通流状态分析。
观察3月25日各时段卡口数据表格大小及内容发现,00:00-5:59时段每小时平均车流量最小,14:00-14:59时段车流量最大。结合生活实际我们再选取早高峰时间段6:00-8:59的车流量数据进行研究。部分统计数据见表2。
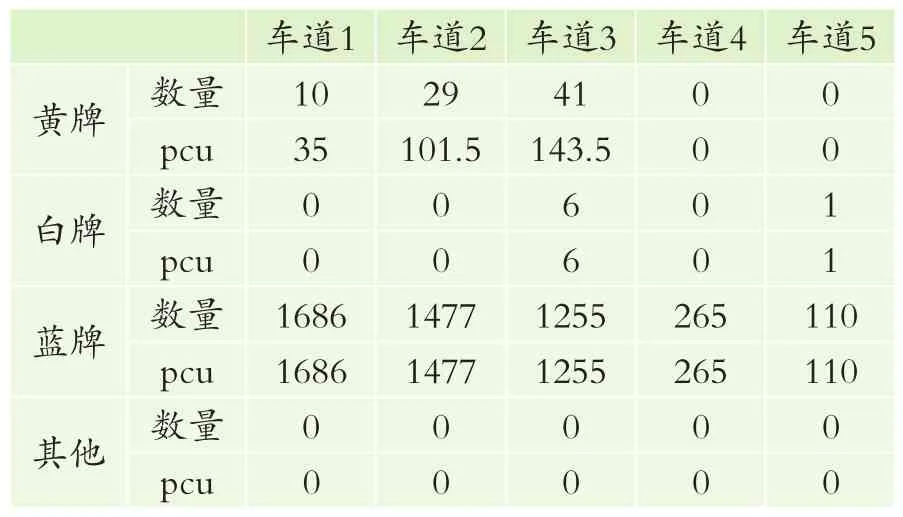
表2 香蜜湖路市委党校路段北行14:00-14:59卡口流量统计
为便于更准确地描述一个小时内车流量的变化情况,以△t=5min将数据细分为12个阶段,按上述步骤分别累计各车道、各类牌照车辆数,整理得到图1。
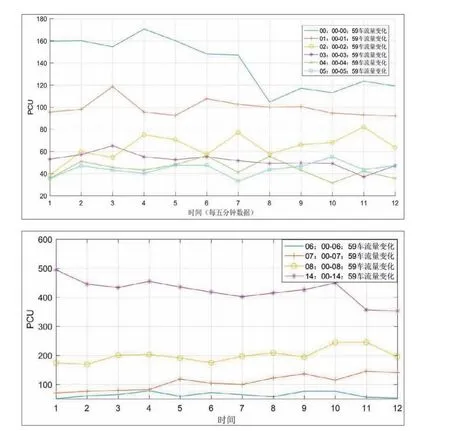
图1 选取部分时间段车流量PCU变化
其中,06:00:00-06:59:00 时间段内总 pcu 值最小,即此时间段内该卡口通行车辆少,道路饱和度最低,可以假设此时车辆大概率以允许范围内的最大速度行驶;在 14:00:00-14:59:00 时间段内总 pcu值最大,即该时间段内该卡口通行车辆多,为准确描述此时的道路车辆密度情况,我们需要结合浮动车数据提供的车辆时速进行下一步分析,以确定道路的车辆密度与车流量之间的相互关系。
3.2 道路实际通行能力的估算
(1)vmax的估计。在 00:00:00-6:00:00 时间段内我们进行随机抽样。利用GPSspg经纬度查询功能录入被抽样车辆的经纬度信息,进行行驶轨迹绘制,图2是其中2辆车的行驶轨迹。
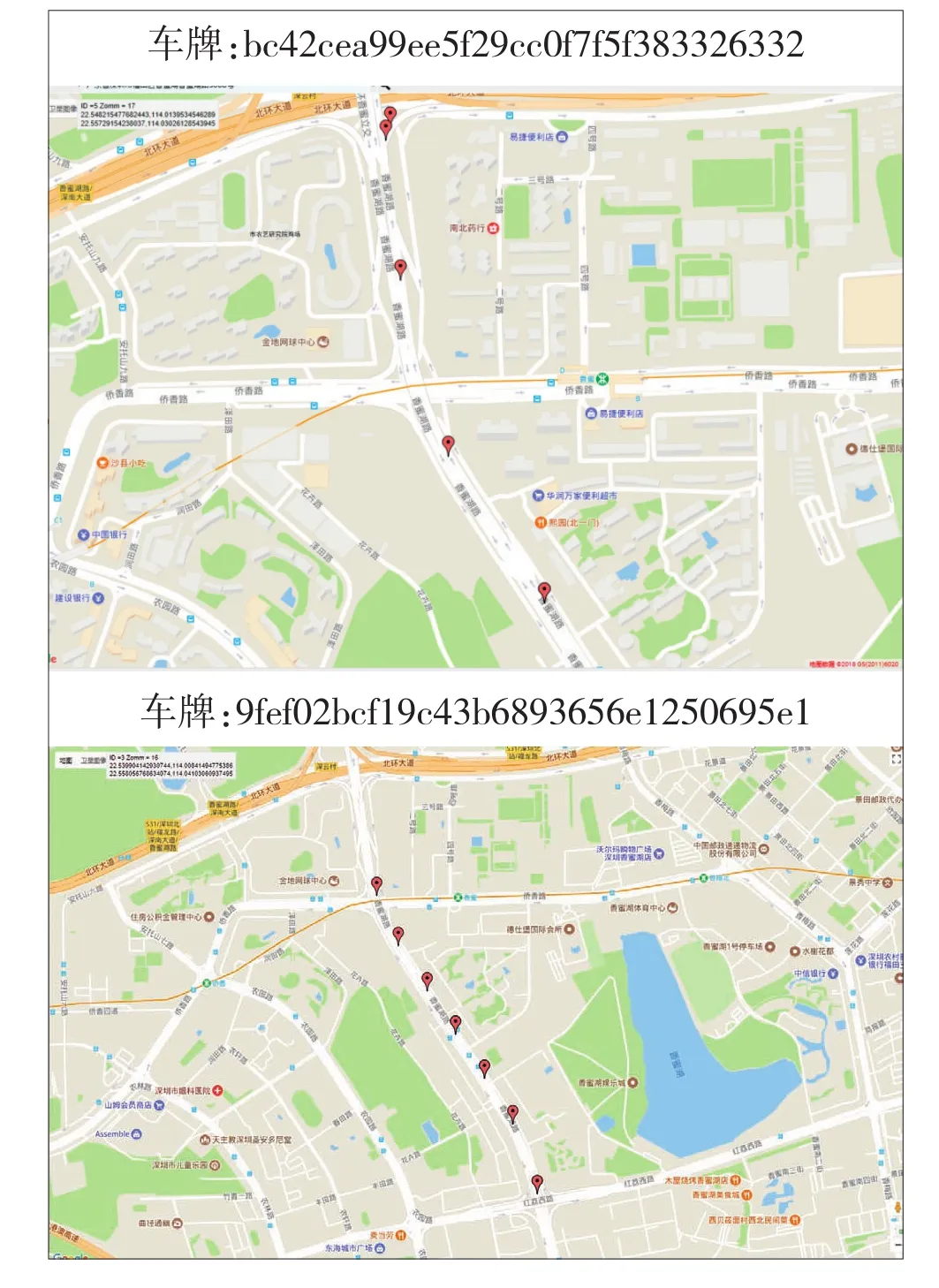
图2 车辆轨迹样本
观察图表得知,车辆在相同△t范围内的行驶距离大致相同,因此我们提出假设:在较小的时间段内车辆保持匀速行驶。则可以将△t时间段内各瞬时速度的平均速度计为该车辆的速度;浮动车数据表格内行驶记录速度与卫星记录速度的平均值计为该车辆的瞬时速度。
在所有抽取的样本中,由于目标需求得在道路饱和度低的状态下车辆最大速度,舍去车速范围在60km/h以下的浮动车数据,得到平均最大时速:
vmax≈77km/h
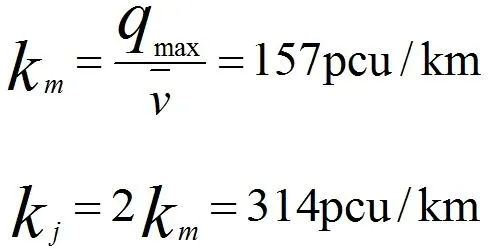
(2)km的估算。km是对应于最大流量的车辆密度。根据图1总pcu变化曲线选取时间段14:00:00-14:59:00 进行分析。同理采用随机抽样的方式在该时间段内收集样本。整理得到的部分信息见表3。
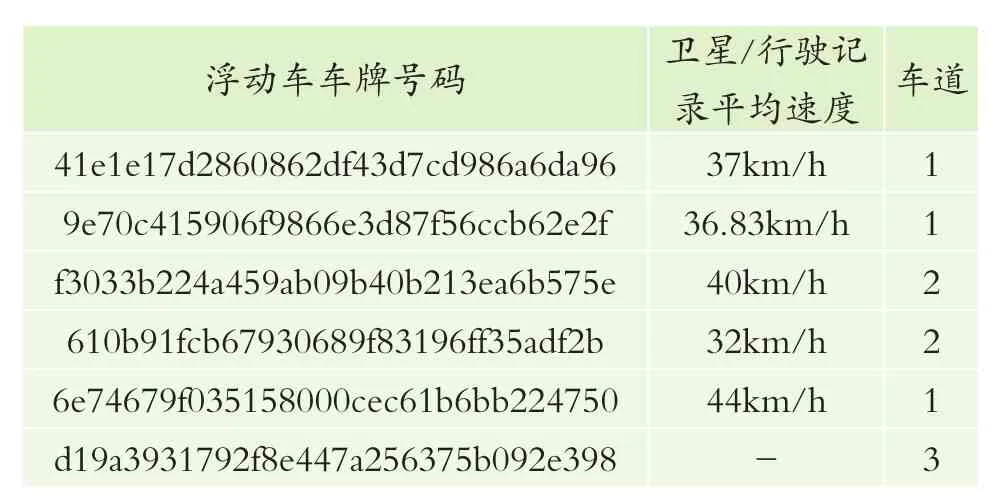
表3 浮动车速度样本
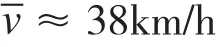
舍去与样本其他数据差距过大的数组,计算得到车流量最大的时段内的最佳速度 :
(3)速度-密度-流量关系分析。由格林希尔治交通模型我们得知,车速与密度之间的线性模型:

为验证所采用的数据是否能够较好地用该模型解释,我们从2018年3月25日的所有卡口数据与浮动车数据中按时间段抽样。
已知时间段,由图1总pcu变化曲线得到各个时间段的车流量;已知被抽样车辆车牌号码,从浮动车数据中获得所对应的行驶速度v;得到被抽样车辆所处交通流的密度k。综上,通过matlab拟合,得到:
q=74.4k(1-k/326)
流量-密度关系如图3所示。
则理论阻塞密度:
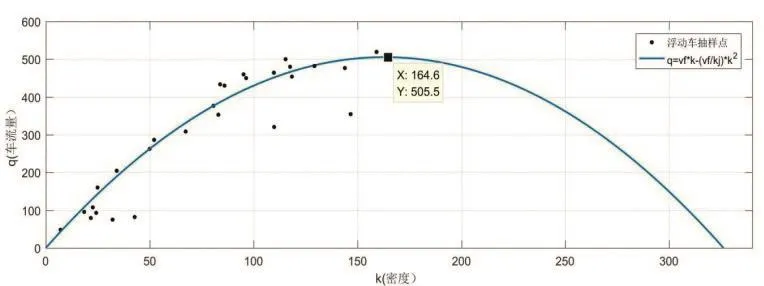
图3 流量-密度关系图
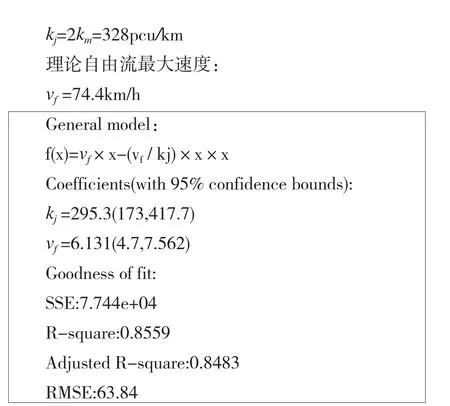
图4 matlab运行后示意图
由confidence bounds=95%可知,拟合效果较好。图4为matlab运行后的示意图。
3.3 交通流状态的描述
路段有相同车流量时,可能有不同的车流密度。例如较低车流量,可能是由于路段行驶车辆较少造成的低流量;也可能是由于路段行驶车辆较多,车辆通过速度缓慢造成的低流量。我们以kmax为临界值,结合速度、流量指标计算。
(1)健康交通状态:k<kmax。
(2)不健康交通状态:k>kmax。
以香蜜路北行25日为例,通过卡口、浮动车数据,选择部分时间段,得到交通状态描述见表4。
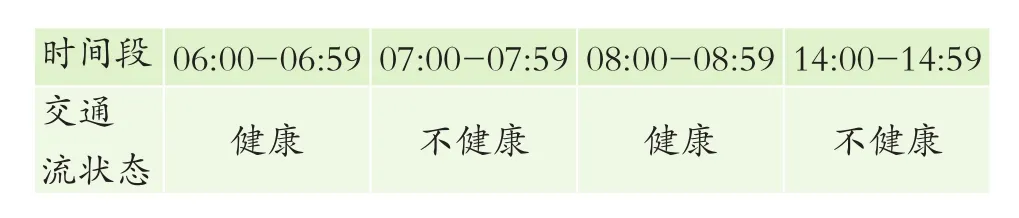
表4 部分时间段交通状态描述
4 基于元胞自动机的交通流仿真
关于交通流的疏散过程,我们将车辆选择行驶车道视为概率随机分布事件。
结合道路的实际情况,通过定义矩阵,在matlab中实现道路可视化。以香蜜路北行电警卡口数据及十字路口2046范围内500m进行分析。为简化分析,我们只对一个信号灯对于北行方向车辆控制的情况进行模拟。在实际交通流模拟中,可以将车道的分布进行修正,对元胞的运行方向进行规范,添加复杂化情况的各项参数,以达到准确的模拟效果。
4.1 车道和相位模拟
(1)基本参数介绍。单个元胞长度:cell=4(m);黄牌车辆长度:L(1)=3×cell;其他车辆长度:L(2)=1×cell;路段长度:C=125cell,L=C×4=125×4=500(m);路段宽度:D=4cell,由两条车道与两条边界构成;路段范围:C×D=125cell×4cell。
注:下文中未提及单位的数字均以cell为单位。
(2)模拟车道构建。将各个元胞的状态用具体数值描述,则整个道路状况可以由一个C*D的矩阵M描述。其中:
M(i,j)=1表示(i,j)元胞被车辆占用;M(i,j)=-1表示(i,j)元胞不能驶入,即红灯相位入口、道路边界的位置;M(i,j)=0表示(i,j)元胞为空元胞,车辆可以进入到此位置;则2313电警卡口监控到某红绿灯的路段可以用矩阵M:
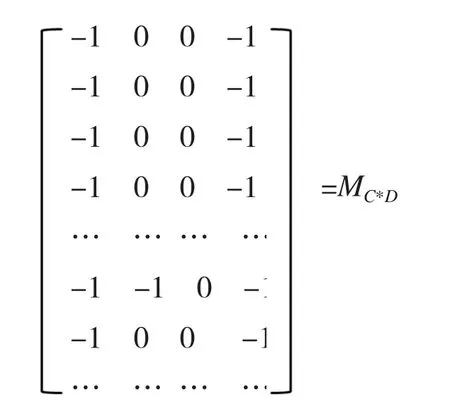
上述矩阵描述了两车道的路段,车道1此时处于红灯相位不可通行;车道2此时处于绿灯相位可通行。车辆在实际情况中会根据自己的需求选择变换车道,我们在这里做假设车辆选择车道服从概率随机分布。红绿灯车道模拟如图5所示。
4.2 交通参数关系
为了更好地模拟车队的启动、停止过程,我们结合交通波的概念,将车队的启动、停止过程划分出来进行单独分析,交通波的波速即车队的启动、停止速度。车队的启动、停止速度要区别于车辆个体的启动、停止速度。
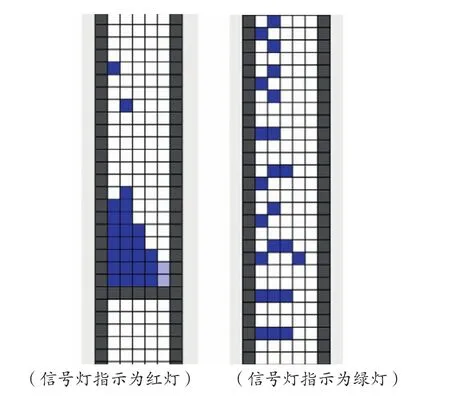
图5 红绿灯车道模拟
参考格林希尔治的速度-密度线性模型,在3.2中我们已经得到了阻塞密度和自由流车速:
4.3 交通流模拟
分析浮动车与卡口数据,发现在8:00:00-8:30:00时间段内香蜜路北行路段交通由正常状态发展到拥堵状态。通过元胞自动机进行交通流仿真,截取4个不同时刻对应的交通流状态如图6所示。
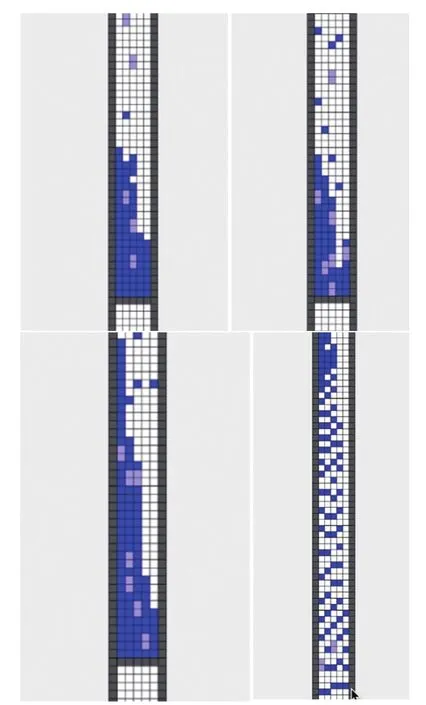
图6 交通流状态模拟
5 基于交通状态提出的决策方案
5.1 交通管理对信息的需求分析
交通管理信息被定位与交通流运行状况和交通管理有关的交通信息,是交通信息中最直接、最基础的信息。因此,我们将交通出行者、交通管理者和政府部门三类参与者在交通管理决策过程中对信息的需求分为三个方面:
(1)基础层需求。主要指交通出行者在制定出行计划的过程中对交通管理信息的需求。
(2)管理层需求。主要指交通管理者在制定管理决策的过程中对交通管理信息的需求。
(3)政策层需求。主要指政府部门在交通政策制定和效果评价过程中对交通管理信息的需求。
基于北京交通大学-城市道路交通状态评价和预测方法及应用研究,具体分析不同服务对象对交通管理信息的需求,见表5。

表5 服务对象的信息需求分析
从表5中可以看出,不管是交通出行者,还是交通管理者,都希望获得当前及未来的交通状态。交通状态是交通管理信息中的核心内容,是科学制定交通管理决策的重要依据。
5.2 交通流状态决策分析
我们根据已有交通流数据,采用3中模型方法描述并评价道路路段交通状态。找出道路路段交通状态处于不健康的时间段,将处于不健康时间段的道路路段作为主要管理对象。同时,在同属于不健康状态的不同时间段中,根据道路路段对应于不同时间段的平均速度vi,按vi的大小进行排列,找出较小的vi对应的时间段,将处于其中的道路路段作为重点管理对象。
5.3 整体分析决策制定方法
5.2 从微观层面出发,对道路情况制定具体的管理决策。本节从宏观层面出发,制定科学的管理和调控决策。
图7为决策制定的两个方向。
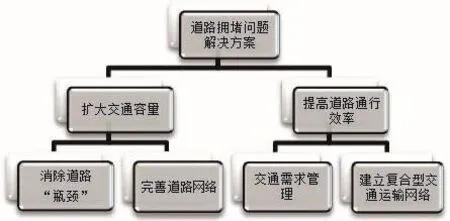
图7 决策制定的两个方向
下面分别从交通管理者和政府部门角度出发,提出具体决策。
5.3.1 交通管理者
根据交通流的评价情况,对于一些常发性交通拥堵的情况以及交通拥堵频发的路段采用主动、全方面的交通管理模式。
(1)大力推行公交优先。加强公交的吸引力,调整公共汽车发车时间,考虑增加班次,延长晚间和周末的服务时间。在城市周边有计划地建造大型车库,方便从郊区或外地开车来的人改乘公交进城。
(2)完善路网结构。例如:完善过境交通系统;加快绕城公路的建设;实施拥堵收费调节路网流量分布。
5.3.2 政府部门
(1)根据交通流的评价情况,合理布局城市功能区域,均衡交通流分布,以提高道路平均利用率。例如:中心城区就业岗位太过密集,可以分散一部分到外围城区,从而减少中、外城区的就业岗位密度差;优质的医疗和教育资源不应该过度集中在中心城区,应该部分分流到外围城区。
(2)建立能够支持宏观交通管理决策制定的服务系统,以提高深圳市交通信息化建设。在城市骨架路网建设基本完成的背景下,充分发挥路网基础设施的潜能,亟需政府部门从宏观层面制定能够有效均衡交通流分布的措施。
6 模型推广及评价
6.1 模型的优点
(1)通用性强。交通流的状态以及仿真模拟均使用统一模型,仅需代入相应数据即可求解。
(2)直观性强。利用matlab编程,结合数据,将道路实时状态可视化,能够直观地看出交通状态评价结论的正确性。
(3)加大城市交通组织管理力度,提高交通管理水平和运行效率。如优化交叉口信号控制、引入先进信号控制系统、优化中心城区单向交通组织。
6.2 模型的不足
(1)本文中道路状态评价没有给出单个车辆行驶路线的拥堵评价,只给出了各道路独立的状态评价。
(2)本文元胞自动机模拟过程中没有考虑车辆变道的事实。
6.3 模型的推广
(1)交通模型:本文中的模型由于与实际生活紧密联系,不仅可以适用于该题所给地理区域,而且通用于所有地段。
(2)商铺排队模型:元胞自动机的模拟过程可以推广到商铺客流的模拟。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
摄影之友(2018年12期)2018-12-26
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国工程咨询(2016年1期)2016-02-14
北京测绘(2016年2期)2016-01-24
中国交通信息化(2015年6期)2015-06-06
中国交通信息化(2015年5期)2015-06-05