
基于自适应观测器的风机变桨系统故障诊断
2019-07-12 07:31:34宋昌举文传博
上海电机学院学报 2019年3期
宋昌举, 文传博
(上海电机学院 电气学院, 上海 201306)
风能,作为当前一种清洁、可再生能源,已成为人们解决能源缺乏问题不可或缺的力量[1]。风力发电是有效利用风能的最主要形式,对于一些风电设备安装在高山和海边等比较恶劣的环境中,风力发电系统运行十分复杂,当系统出现参数不确定时,对系统的控制将更加复杂[2]。因此,对风机可能产生的故障进行快速有效地估计,确保风力发电系统能安全可靠地运行具有重要意义。
变桨系统故障在风电机组的运行故障中发生率较高[3],风电机组变桨系统故障主要有传感器故障、齿轮箱故障及轴承故障等,传感器是变桨系统中最基本的元件,也是最容易发生故障的[4]。如果故障传感器的输出信号被用于系统控制器的输入,将会对闭环反馈控制产生影响,使风力发电系统输出异常,导致系统性能降低[5]。变桨系统能否稳定运行,在很大程度上会受到风速的影响,当风速发生改变时,桨距角传感器根据风速的变化,可以实时将桨距角变化的信息传递给控制器,由控制器及时地发出改变桨距角的指令信息,并通过执行机构迅速动作,调整桨距角,来保证风机的稳定运行。因此,对系统中传感器单元进行实时故障检测显得尤为重要。
当前的几类故障检测方法有基于解析模型[6-7]、基于信号处理方法[8]以及基于知识的方法[9]。其中,基于解析模型的方法中,观测器法又是应用最为广泛的,可以对产生的各类故障进行准确估计[10]。近年来,基于观测器的故障诊断方法受到了很多关注,文献[11]提出了一种基于未知输入状态观测器的设计方法,却在实际的应用方面有一定的局限性;文献[12]是将文献[11]设计观测器的方法应用于风机执行器的故障诊断中,但是其输出只能为确定的情况;文献[13-14]采用的是基于滑模观测器对传感器的故障检测,仅仅是对状态方程为线性且没有未知参数的情况下的观测器设计;刘聪等[15]将自适应算法与滑模观测器相结合,研究了执行器和传感器故障重构的问题,但是不能保证观测器稳定性。本文针对风机变桨系统的执行机构故障和传感器故障问题,提出一种基于自适应解耦观测器的故障诊断方法,主要通过两个方面设计出理想的故障诊断方案:① 对未知干扰因素具有鲁棒性;② 对故障信号具有较强的灵敏度。考虑到建模误差、噪声等不确定因素,将这些不确定因素统一作为系统的未知输入干扰矩阵,设计一种基于解耦形式的自适应观测器。该方法通过解耦处理技术使系统的状态方程不再含有未知故障向量,使系统的故障估计和状态估计的求解得以分开,通过得到状态估计和测量输出后,对系统的故障向量进行估计,从而产生了对扰动因素不敏感而对故障量非常敏感的残差信号,利用此残差信号的阈值评价函数,建立故障决策逻辑,对系统进行故障检测。
1 风机变桨系统建模
变桨系统是风力发电机正常运行的重要环节之一,风力发电机组能否正常工作与变桨系统能否稳定高效的运行有着重要联系,而变桨系统中,桨距角传感器和变桨系统执行机构则是保证变桨系统正常工作的重要器件。
根据变桨系统运行原理进行动力学分析,如图1所示。

图1 风机液压变桨系统动力学模型
图1中,v为空气进入风轮前的实际风速;Tr为主传动轴转矩;Tg为发电机转矩;ωr为主传动轴转速;ωg为发电机转子的实际转速;P为发电机的实际发电功率;U为控制系统的控制电压;β为桨距角;βr为桨距角的测量值。
在不影响模型精度的条件下,忽略液压缸的内部摩擦和部分负载,仅对含有噪声、干扰等不确定因素和系统故障的液压变桨系统进行故障模型的建立,并将系统的未知不确定因素统一归并到一起,用干扰信号矩阵d(t)表示。根据系统的动力学模型,可建立变桨系统故障模型如下:

(1)
式中:X(t)=[βωgωgm]T;u(t)=[βr];d(t)=[v,U]T;X、Y、u分别为系统的状态向量、系统输出向量和系统控制输入向量;ωgm为发电机转速测量值;A、B、C均为常数矩阵;E、F均为已知的故障分布矩阵;f(t)为故障特征向量,是待估计的定常向量,可表示f(t)=[f1(t),f2(t),…fn(t)]T,则f(t)的每个分量分别为该系统中不同故障类型。f(t)=0时,表示没有故障;f(t)≠0时,表示发生故障。Ef(t)和Ff(t)分别为系统的执行机构故障和传感器故障。
2 解耦自适应观测器设计与稳定性分析
2.1 问题描述
根据变桨系统的故障模型,并结合解耦形式的自适应观测器设计原理,对系统进行重新描述如下:

(2)
式中:x(t)∈Rn为系统的状态向量;u(t)∈Rr为系统的控制输入向量;y(t)∈Rm为系统输出向量;A∈Rn×m,B∈Rn×l,C∈Rm×n均为为常数矩阵;E∈Rn×p,F∈Rm×p均为已知的故障分布矩阵;f(t)∈Rp为未知故障特征向量,是待估计的定常向量。
2.2 解耦自适应观测器设计
对系统构造自适应观测器得

(3)

定义状态估计误差

故障估计误差

则有

(4)

(5)
式中:γ(t)∈Rn×p为待设计矩阵。
由式(4)和式(5)可知:

(6)
为简化式(6),可以将待定的参数γ(t)、η(t)选择如下取值:

(7)

(8)
将式(7)和式(8)代入式(5)可简化为

(9)
再由式(8)代入式(3)可得:

(10)


(11)
令Δk=A-LC,则自适应观测器增益矩阵的选择应该满足
(12)


(13)
式中:K为待设定的时变矩阵。
从而可知故障估计误差方程为


(14)
将式(5)代入式(14)得
(15)


(16)
当选择:
K=Γ[Cγ(t)+F]T
(17)
其中,Γ∈Rp×p为任意的正定矩阵,则可使式(16)收敛,具体证明在下一节的观测器稳定性分析中。
将式(17)代入式(13)中,得到故障估计状态方程为

(18)
接着将通过上述推导,对自适应观测器进行解耦形式的变换。结合式(5)和式(7)对式(2)进行变换后得到解耦后的新系统为

y(t)=Cz(t)+[Cγ(t)+F]f(t)
(19)
通过解耦变换后的新系统具有的优点:通过解耦处理后,系统的状态方程不再含有未知故障向量,使得系统的故障估计和状态估计的求解得以分开,有利于先得到状态估计和测量输出后,再对系统的故障向量进行估计。
通过式(12)设计增益矩阵L,使得(A,C)具有一致可观性,即其状态z(t)稳定。
状态z(t)的估计方程为

(20)


(21)
根据式(7)、式(20)、式(21)可确定解耦自适应观测器设计方程为
(22)
2.3 观测器稳定性分析
本章所设计观测器的方法与第3章中自适应观测器的证明过程相比,减少了比较严格的Lipschitz函数条件,使得解耦后的自适应观测器设计要求的自由度更高,对故障系统的应用也就更加的广泛。
对解耦后式(19)设计自适应观测器的稳定性分析需要作如下假设。
假设1式(19)中的矩阵E、F均为有界且分段连续。
假设2针对矩阵(A,C),存在有界的时变增益矩阵L(t),满足式(12)时,使得式(9)稳定。
假设3由矩阵E、F组成的线性滤波器(H(t)∈Rm×p)为

(23)
其中,将γ(t)和H(t)作为该滤波器的正常状态和输出。假设存在正常数α、T,对所有的t≥t0,使如下不等式成立,即

(24)
式中:Ip为单位矩阵。
引理1存在正常数α、T,对所有的t≥t0,使得不等式(24)成立时,则系统
(25)
是稳定的。其中,Γ∈Rp×p为任意的正定矩阵。
引理2若如下系统稳定

(26)


(27)
也是有界且收敛于0,其中,若δ(t)为快速的指数收敛,那么z(t)也是可以快速收敛的。
根据以上假设和引理,可以得出如下定理:

证明由上一节自适应观测器设计过程可知,状态z(t)和故障参数f(t)的误差状态联立方程为

(28)
(29)

令式(29)的后半部为
(30)
又由式(5)可知:

(31)
3 残差设计及仿真分析
3.1 残差评价函数设计
残差是系统的实际输出与状态观测器输出的差值,反映实际系统与系统数学模型之间不一致程度的一个量。变桨系统的残差主要由系统的干扰和故障确定,假设风机系统的残差表达式为

(32)

要设计残差的评价函数,就必须先考虑残差阈值的设计,在变桨系统中,考虑到在系统发生故障时,可能存在未知输入扰动的原因,对系统的输出信号的测量值会受到较大影响,为了克服干扰的影响,引入残差的均方根函数表达式为
(33)
式中:JRMS表示残差信号r(t)的均方根值。则定义阈值为
(34)
根据以上故障决策逻辑为
当|r(t)|>Jth,RMS,系统发生故障,报警。
当|r(t)|≤Jth,RMS,系统未发生故障,不会报警。
3.2 仿真结果与分析
为验证基于观测器方法故障诊断的有效性,对系统(1)中的部分系统矩阵和参数选取如下:



(1) 当变桨系统执行机构发生故障时,故障矩阵F=0,取执行机构在t=10 s时,发生幅值变化的跳变故障,根据残差的阈值评价函数,计算出故障诊断的阈值Jth,RMS=0.658 8,即当|r(t)|>Jth,RMS,诊断系统发生故障。仿真结果如图2、图3所示。

图2 执行器故障幅值估计
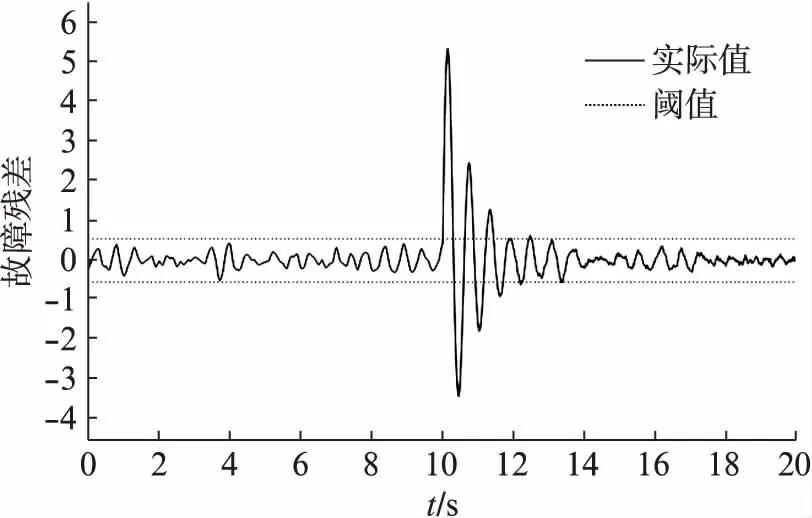
图3 故障残差与阈值对比
由图2可见,所设计的解耦形式的自适应观测器能够很好的反映变桨系统在发生执行机构故障前后的实际情况,具有较好的跟随性,并且估计的故障值能准确反映系统的变化。由图3可知,根据设定的阈值,系统故障残差r(t)的值在t为10—11 s左右超出阈值范围,说明基于自适应观测器方法能检测出风机变桨系统的执行机构发生了故障。
(2) 当系统发生传感器故障时,系统方程中的故障矩阵E=0,假定桨距角传感器正常工作式f=0,当传感器发生信号丢失故障时,取传感器分别在t=3 s、t=7 s、t=10 s、t=15 s发生故障,具体故障描述如下:
接着根据残差的阈值评价函数,计算出故障诊断的阈值Jth,RMS=0.459 8,即当|r(t)|>Jth,RMS,诊断系统发生故障。仿真结果如图4、图5所示。

图4 传感器故障幅值估计

图5 故障残差与阈值对比
由图4可见,所设计的解耦形式的自适应观测器也能够很好地反映变桨系统在发生传感器故障前后的实际情况,在多次故障发生时也能准确反映系统的变化,具有很好的收敛性与跟随性。由图5故障残差和阈值的对比可知,通过设定的阈值,可以有效地检测出系统故障的发生,对于传感器多次发生故障也可及时检测,说明基于自适应观测器方法能检测出风机变桨系统的传感器故障的发生。
4 结 语
本文将自适应观测器设计方法和解耦处理方法相结合,针对风机变桨系统的故障诊断问题,提出了一种解耦形式的观测器设计,通过对系统方程进行解耦设计后,系统的状态方程不再含有未知故障向量,使系统的故障估计和状态估计求解得以分开,有利于通过先得到状态估计和测量输出后,再对系统的故障向量进行估计,由仿真结果可以看出,通过设计的解耦观测器,对具有干扰等不确定因素的复杂变桨系统故障问题,可准确有效地检测和估计故障,对故障幅值的变化也有很好的跟随性。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
大电机技术(2018年4期)2018-09-26 03:11:38
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
河南科技(2015年8期)2015-03-11 16:23:52
