半球谐振陀螺发展的技术特征
2019-07-11 04:59:46谭文跃方海斌严隆辉
导航定位与授时 2019年4期
彭 慧,方 针,谭文跃, 方海斌, 严隆辉
(中国电子科技集团公司第二十六研究所,重庆 400060)
0 引言
半球谐振陀螺是继传统的机械旋转陀螺和两光(激光、光纤)陀螺之后发展起来的一种新型高精度陀螺,具有高精度、长寿命、高可靠的特点,是高精度惯性器件主流之一。但由于具备一些独有的进动机理、精密结构、复杂工艺等技术特征,其制作工艺过程及工作模式等与传统的陀螺仪有很大的不同,研制难度很大[1]。目前,仅有美国、法国和中国研制出正式产品并在工程型号中得到成功应用,处于世界领先地位。俄罗斯虽然起步较早,但由于各种原因,目前尚未开展大规模应用[2]。由于高技术壁垒的封锁,相互间交流有限,因而世界各国在研制过程中采用了不同的结构形式和工艺路线,并根据应用场合的不同,开发了不同的控制工作模式。文章从各国半球谐振陀螺的发展情况出发,分析了其在结构、控制电路、工作模式以及应用领域上的差异,提出了我国半球谐振陀螺的发展方向,以推进其技术的发展。
1 各国半球谐振陀螺的研制状况
1.1 美国的半球谐振陀螺
1975年,在美国海军的支持下,美国Delco公司采用低阻尼的熔融石英为谐振子材料,开始了半球谐振陀螺的研制历程[3],先后研制了Φ58mm的Block 10、Block 20、Block 30、 HRG158等型号。通过激光去除质量的谐振子平衡装置、更新电路系统、改进工艺等,成功研制出体积更小、精度更高的HRG130系列。在应用方面,联合波音商用运输机,对捷联导航系统进行试验,并获得成功。1994年,Litton公司收购了Delco公司的惯性事业部,并对半球谐振陀螺投入了大量的资源支持,陀螺仪性能得到全面提升,产品也开始向更多应用领域拓展。通过优化电极配置、采用新材料、减小尺寸等措施研制的HRG130R,可满足石油钻井行业对极端工作温度(-40℃~155℃)、承受恶劣环境(500g冲击,30g-RMS随机振动)的需求;通过金属壳密封,消除氮渗漏问题,HRG130P一度成为主推产品;Hubble HRG通过改进封装工艺,最大限度地减少了输出噪声及热干扰,最终满足了哈勃太空望远镜的需求。

图1 Northrop Grumman公司三件套结构Fig.1 A three-piece structure of Northrop Grumman HRG


图2 Northrop Grumman公司 mHRG结构Fig.2 Structure of Northrop Grumman mHRG
1.2 法国的半球谐振陀螺
法国Sagem公司的半球谐振陀螺相比其他国家的陀螺仪,采用的是两件套结构,部件数量少,保证了其高可靠性。在惯导级陀螺仪中,半球谐振陀螺的体积、质量、功耗最小;对振动、温度环境不敏感,抗冲击(大于2000g)。在控制电路上,Sagem公司的半球谐振陀螺采用了全角控制方式,通过控制电路,实现陀螺工作宽范围,以及陀螺误差(漂移、标度因素)在线自标定。据国外报道,Sagem公司已交付数千颗半球谐振陀螺[7],其开发的惯性导航系统成功应用于航天、陆地、海洋和太空,满足民用和国防应用要求。
法国Sagem公司已有多个半球谐振陀螺用于姿轨控系统,并且还未有故障及性能下降的记录。在航海领域,BlueNaute半球谐振陀螺姿态导航系统以其高可靠、免维护的优势,通过5a的运行反馈和百万小时的运行时间验证,平均故障间隔时间(Mean Time Between Failure, MTBF)超过250000h。在陆用战术级武器上,Sagem 20型半球谐振陀螺具有良好的机械抗震能力,构建质量为4.5kg的惯导系统,方位精度为1mil。目前量产的陆风多角色战斗机空对地武器Hammer中也使用了半球谐振陀螺[8],其任务成功率高达99%。一款Primus型半球谐振陀螺构建的惯导系统质量仅为420g,是目前为止最轻的导航级惯导系统。小体积低功耗特性的精密方位角和垂直角度模块(PAVAM),质量仅为420g,功耗低于5W,用于手持长距离多功能红外望远镜。在商用的客机中,Sagem公司也开发了基于半球谐振陀螺的惯性导航系统,质量为3kg,在飞行中已经体现良好的惯性性能。根据报道,欧洲新的太空发射器Ariance6 选择了半球谐振陀螺的太空定位系统,选择的原因也是因为半球谐振陀螺天生的抗空间辐射特性,以及优越的尺寸、质量和功耗(Size Weight and Power consumption , SWaP)特性[9]。

图3 Sagem公司两件套结构Fig.3 A two-piece structure of Sagem HRG
法国Sagem公司的半球谐振陀螺已广泛应用于航天、陆地、海洋和太空[10],其出色的性能及环境适应性,使得国内外对半球谐振陀螺的关注度越来越高。
1.3 俄罗斯的半球谐振陀螺
俄罗斯自20世纪80年代早期开始半球谐振陀螺的探索与研制,具有很强的理论研究基础。拉明斯基仪表制造设计局早期研制了直径为100mm的半球谐振陀螺,进入20世纪90年代,又开发了直径为50mm的半球谐振陀螺,其零偏稳定性达到0.005~0.01(°)/h。
俄罗斯米亚斯梅吉科科研生产所开发了直径为30mm的半球谐振陀螺,应用于卫星天线稳定系统和组合惯性单元。通过简化石英敏感元件的结构和研制相应的控制系统技术,成功控制了产品成本,拓展了半球谐振陀螺的应用范围。采用半球谐振陀螺研发出的石油钻井勘探用斜仪具有较高的性能,能满足其低成本、小尺寸、低功耗的要求,可承受极端温度和冲击,见图4。
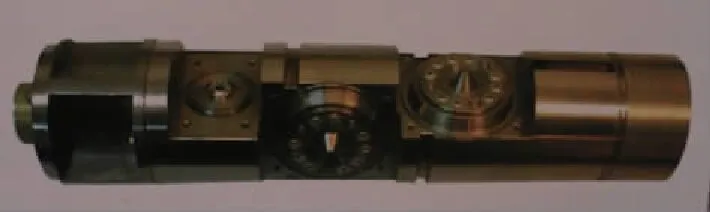
图4 石油钻井勘探用半球谐振陀螺斜仪Fig.4 HRG inclinometer for oil drilling exploration
米亚斯梅吉科科研生产所在半球谐振陀螺的制作工艺技术领域具有独特的技术专长[11]。从1995年开始,专注于开展工艺技术研究,解决半球谐振陀螺研制中的工艺技术问题,其独有的离子束调平技术,为提高半球谐振陀螺精度、减小陀螺噪声、抑制漂移干扰发挥了重要作用。近年来,米亚斯梅吉科科研生产所还研制了两件套结构的半球谐振陀螺,如图5和图6所示,并在此基础上研制了三轴角速度传感器,如图7所示。

图5 两件套结构件Fig.5 A two-piece structure of Medicon HRG

图6 两件套半球谐振陀螺Fig.6 A two-piece structure of Medicon HRG
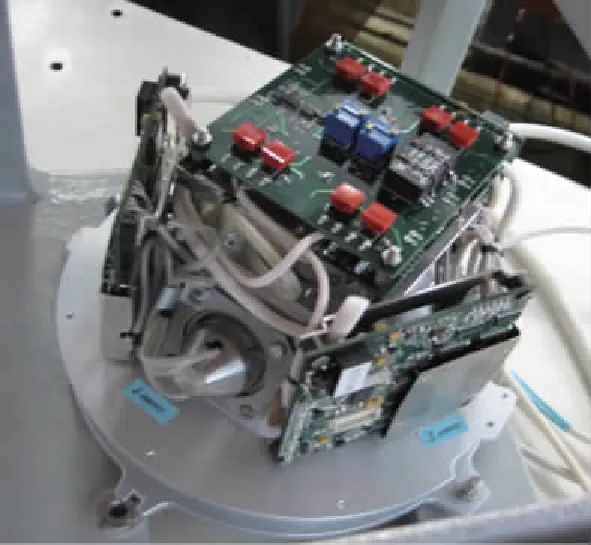
图7 三轴角速度传感器Fig.7 Triaxial angular velocity sensor
1.4 中国的半球谐振陀螺
我国的半球谐振陀螺研究开始于20世纪80年代末期,先后有北京航空航天大学、北京理工大学、哈尔滨工业大学、中国电子科技集团公司第二十六研究所(以下简称中电二十六所)等单位开展了半球谐振陀螺的研究工作,对基础理论、加工工艺、信号处理等方面进行了不同侧重的研究,取得了一定的成效,有了良好的开端。后续,天津航海仪器研究所、上海航天控制技术研究所、北京控制工程研究所、国防科技大学等单位也开展了加工工艺、振动模型、误差补偿、控制电路的相关研究。
我国的半球谐振陀螺应用背景起于卫星,最初采用的全角控制方式,开发的第一个样机也是全角方式。后来针对航天用户的实际工作模式,需要在较小的速率范围内满足高精度敏感要求,因此,目前国内的半球谐振陀螺采用的是力平衡控制方式。
力平衡模式下的半球谐振陀螺的控制电路包括3个基本的控制回路[12]:幅度控制回路确定了半球谐振陀螺中储存的动量和速率刻度因子;正交控制回路用于抑制两轴之间微小的频率失配引起的正交振动;速率控制回路利用速率激励使陀螺振子振形稳定在固定位置。
半球谐振陀螺控制电路目前采用的是数模混合电路,由于陀螺前级读出放大电路很难用数字电路实现,所以采用模拟电路实现第一级的缓冲电路。后续电路采用数字信号处理的方式对波腹点和波节点的信号做傅立叶变换[13],得到二者的相位差,从而解调出陀螺旋转的角度和正交振动的大小。这种方式可以进一步降低陀螺敏感到的角速率输出信号中的白噪声,有效去除失调电压对零偏稳定性指标的影响。表1为各报告中的陀螺指标。
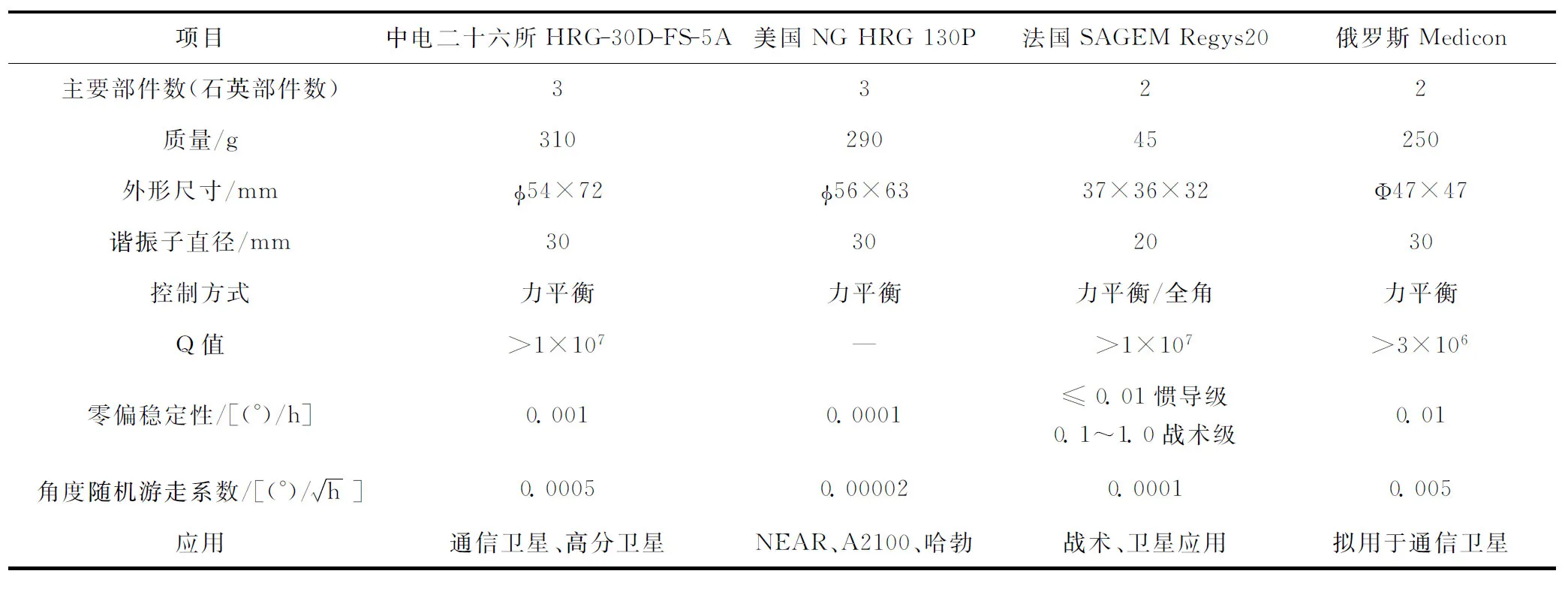
表1 国内外半球谐振陀螺指标比较
我国半球谐振陀螺的卫星应用型号产品的研制从2009年开始,经过潜心3年的研制,2012年10月[14],我国在太原卫星发射中心成功将实践-9号卫星发射升空并送入预定转移轨道,半球谐振陀螺姿态敏感器(图8)也随之开始了在轨运行试验,并成功完成卫星闭环控制试验。截至目前,半球谐振陀螺姿态敏感器已随实践-9号卫星安全在轨运行接近7年。

图8 实践-9号卫星半球谐振陀螺姿态敏感器实物图Fig.8 SJ-9 satellite HRG IMU
近年来,中电二十六所为卫星用户提交了大量半球谐振陀螺产品。2017年1月5日,半球谐振陀螺首次在型号任务卫星——通信技术试验卫星二号上得到成功应用[15],开机以来在轨运行稳定,各项指标满足系统要求。此次成功应用是我国半球谐振陀螺技术首次进入卫星平台核心控制领域。2018年5月,半球谐振陀螺再次随高分五号卫星发射升空[16],开启新的应用。
目前,半球谐振陀螺也在开展以其为关键部件的某卫星平台的研制工作,不久的将来,半球谐振陀螺将批量应用在卫星平台,有利于提高我国卫星的寿命和可靠性。
2 国内外半球谐振陀螺的差异
目前,国外半球谐振陀螺主要生产厂家为美国的Northrop Grumman以及法国赛峰集团旗下的Sagem公司,国内目前有成熟产品的是中电二十六所,产品从结构、控制电路方式、应用等各有差异。
2.1 基本结构
美国Northrop Grumman的早期产品HRG130P采用了典型的三件套结构,分为激励罩、半球形振子和敏感读出基座,陀螺的控制和信号检测读出采取对不同的部位分别进行处理。其特征是信号处理流程单纯,机理清晰,但同时带来加工工艺的繁琐,零件精密装配难度增大。
为减少加工难度,法国Sagem公司采用平板电极方式[17],将部件个数减少到2个,提高了加工工艺效率,降低了生产成本,提高了可靠性。采用信号复用方式进行信号检测与控制,但同时也带来了控制机理的变异、电子信号处理难度增大的问题,还存在较强的信号干扰等问题。
俄罗斯研究的半球谐振陀螺也同样采取了2个部件的结构方式,但结构上仍运用球面电极处理方式,在电极结构、信号检测处理等方面又有较大的不同。俄罗斯产品在低功耗方面有着较大的优势。
国内的半球谐振陀螺也采用了三件套结构方式,但在部件结构、电极的分布、信号的检测等方面有着不同的设计思路。
法国Sagem公司采用的两件套结构使得其产品在SWAP特性上有较大的优势,小型化的结构设计,也是半球谐振陀螺发展的方向之一。
2.2 电路控制方式
美国Northrop Grumman公司的产品采用角速率力反馈平衡控制方式,也是大量已应用产品的主要工作模式。
法国Sagem公司采用了全角控制方式,实现了陀螺误差(漂移、标度因数)的在线自标定技术。
俄罗斯产品也采用了力反馈平衡控制方式,但在信号控制流程上有着较大的不同。
国内的半球谐振陀螺最初采用全角控制方式,并开发出完整的功能产品,后期为了满足卫星工程的小速率、高精度需求,改为力平衡控制方式,在实现高精度的同时,也兼顾了信号接口、系统控制模型一致性等卫星姿控系统的要求。
结合国内除宇航外其他装备的需求,为了扩大半球谐振陀螺的应用范围,提高陀螺的工作性能和动态范围,又开展了全新的全角模式控制方式研究工作。
2.3 应用领域
半球谐振陀螺的空间应用在美国已经相当成熟,从1996年至今,半球谐振陀螺已参与许多太空项目,包括:小行星登陆(NEAR,1996—2000年)、土星环绕(CASSINI,1997—2008年)、 哈勃太空望远镜、NASA的NEAR等。在这些前沿的宇宙空间探测项目中,半球谐振陀螺无一不表现出优良的性能,证实了半球谐振陀螺是作为空间探测任务惯性器件的最佳选择。同一时期,美国半球谐振陀螺也开展了战略导弹、商业航天器等领域的应用研究。
由文章前面所述,法国Sagem公司的半球谐振陀螺已广泛成功应用于航天、陆地、海洋和太空,产品形式多样。而国内目前的成熟产品主要用于卫星,包括航空、船舶、车辆等其他领域的应用工作也正在大力开展。
2.4 技术发展
随着应用领域的扩展,微型化成为半球谐振陀螺发展的热门话题。微型半球谐振陀螺是利用半导体工艺,在硅或石英玻璃材料基底上,采用半导体工艺,加工出微型的3D半球形球壳,其工作机理基于传统的半球谐振陀螺原理,可以同时兼顾陀螺产品的小型化、高性能。
国外多个研究单位,如密西根大学、加州大学、Honeywell公司、耶鲁大学、DARPA实验室、佐治亚理工学院等[18],开展了微型半球谐振陀螺的相关研究工作,开发出了多种半球壳体及激励检测结构的关键制作工艺。微型半球谐振陀螺的微加工工艺可分为微吹制法[19]、牺牲层法[20]、精加工法[21]。微吹制法、牺牲层法为MEMS工艺,相比精加工法,更适合批量生产,降低成本。国外已成功制作出陀螺样品,零偏稳定性达到0.0391(°)/h[22],谐振子直径仅5mm左右,目前还处于实验室陀螺样机阶段,还未开展试用。
国内如国防科技大学、复旦大学、清华大学、兵器214所、南京理工、东南大学、中电二十六所等多家单位已组建专门研究团队实施微半球谐振陀螺研究。国防科技大学采用旋转基片火焰吹制工艺方法及平面外电极结构[23],并创新设计出了半球谐振子T形质量块结构,用于谐振子质量不对称的修调及增加激励检测电容,这些技术有效降低了吹制过程中温度场不对称性对球壳唇缘圆的影响,减小了振动模态的频差,有效提高了谐振子的品质因数。目前,国内少部分单位已制作出谐振子样品及陀螺样品,但性能还待提高。
3 结束语
半球谐振陀螺的研究工作在国外已经发展了近40年,国内也已有20年。随着其不断扩展的成功应用,国内的半球谐振陀螺将从结构、电路控制方式等方面进行研发,缩小与国外技术的差距,同时也正致力于战略平台、船舶等更广阔领域的应用开发工作。半球谐振陀螺的技术发展正向小型化、高性能、高可靠发展,微型半球谐振陀螺的研究也正在国内外如火如荼的开展,技术发展突飞猛进,只有快速攻克谐振子工艺、控制环路、信号提取及补偿等关键技术,才能与时俱进,早日实现半球谐振陀螺的广阔应用。
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04 05:47:52
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国化肥信息(2016年33期)2016-05-17 04:25:43
通信电源技术(2016年4期)2016-04-04 02:57:38
振动、测试与诊断(2014年6期)2014-03-01 01:14:54