对影响快链条运动状态的相关参数的研究
2019-07-09 13:04:12张童欣李晋斌谢金江张芳芳
物理与工程 2019年2期
张童欣 李晋斌 谢金江 张芳芳
(1南京航空航天大学理学院,江苏 南京 210016; 2 清华大学航天航空学院,北京 100084;3南京航空航天大学航空宇航学院,江苏 南京 210016; 4南京航空航天大学航天学院,江苏 南京 210016)
链条类物体问题是历史上一个古老而备受关注的力学问题。历史上,不管是在静力学领域还是在动力学领域,基本上都是使用较理想的一维,柔性,均匀模型。链条问题最开始的提出是在静力学领域,有趣的是最开始研究它的是意大利著名的天才人物达芬奇,达芬奇的经典作品《抱银貂的女人》中女人的项链下垂的形状描绘,达芬奇苦苦思考了许久:固定项链的两端,使其在重力的作用下自然下垂,那么项链所形成的曲线是什么?
最早的定量分析可以追溯到伽利略对在重力作用下两端固定链条的形状为抛物线的猜想,但是荷兰物理学家惠更斯就用数学物理方法证明其不是抛物线。真正解决这个问题要在达芬奇去世170多年后的雅各布·伯努利,他用微积分方法比较轻松的解决了这个问题。从那时候开始,微分方程就成了解决链条问题的标准方法。
19世纪下半叶的大西洋海底电缆铺设工程,一维柔性物体连续力学模型被不断运用。但这并不代表绳索动力学的研究已经趋于完善,如太空漫步中宇航员与航天器连接绳索在引力梯度下的呈现的力学特性,航空母舰上对舰载机的阻拦索在极大冲击下的响应等问题都对绳索动力学提出了新的挑战。
即使是绳索最简单的下落问题,也是在20世纪中后期在得出比较一致的认识。链条下落时会出现快链条的奇特现象。快链条现象最早指的是连续性系统的加速现象。前人研究的场景主要有三个。第一个场景中的链条从高处自由释放落入盘中;第二个是将一串链条两端拴在同一高度的地方,从某一时刻开始将一端自由释放,称之为折叠链;第三个是将一捆快链条盘堆在台面边缘上,然后将其一端自台面边缘自由释放,三种场景都能得出加速度增大的结论。
Calkin and March[1,2]认为这个第二个系统是保守的,并没有耗散机制。他们一开始测量一根2m长,含有81个链结的链的下落过程,发现这种链比自由落体运动下落得更快。连续模型准确地描述了实验链的运动,但是在绳末端出现了问题,随后他们测量了固定端的拉力T,发现理论上连续模型所给出的链的拉力包含了一个与速度的平方成比例的项。而实验所测得的拉力的最大值是链条自身重量的25倍,超过了自由落体运动下的拉力的理论值。因此毫无疑问折叠链下落的速度是大于g的。
Hamel[1,3]假设能量守恒,正确的解释了折叠链问题。在早期的论文中,作者们反对Hamel的能量守恒解法,并且声称在折叠链下落过程中存在由非弹性动量守恒碰撞造成的能量的耗散。他们引用了其他一些下落链的Carnot能量损失的例子来辩护他们的理论。但Hamel认为,我们能看到能量守恒的结果,是因为质量离开自由端链时所得到的能量弥补了固定端子链吸收转移质量所造成的Carnot能量损失。Schagerl et al.对于折叠链的测量结果使得他们大吃一惊,因为他们在理论上得出折叠链下落的加速度是g,并且总机械能不守恒的。但是他的实验得到了折叠链下落加速度大于g的结论。
折叠链下落的加速度大于g这一现象可能会引出折叠链的运动不是唯一的这一结论,因为“下落的绳子本身就存在更多的满足线性动量守恒但是机械能不守恒的解”,于是这个问题在Schagerl et al[1,4]的文章里是一个悖论。
但是很明显这一结论是不成立的。因为不论折叠链能量守恒与否,它的运动方程都是一个线性微分方程,给定初始条件之后就得到了唯一的解。所以折叠链的加速度大于g这一实验结果恰恰证明了这个运动不会是能量不守恒的自由落体运动这一事实。
Irschik he Holl[1,5]也提到了关于折叠链的动量守恒但是能量不守恒的这一结论。在关于拉格朗日方程的一些早期论文里,他们困惑于实验结果,因为他们认为固定端链的拉力应该消失,因此自由端应该做自由落体运动,他们发现这一结论与观察结果不符。
我们能看到关于能量损失的错误的结论是由于忽视了转移质量离开自由端时的能量的获取。这个能量增益与固定端接收的转移质量所造成的Carnot能量损失实时相反。
无独有偶,第三种模型也曾被认为总机械能是不守恒的。Cayley[1,5,6]在1857年首先研究了这个问题,他把这种运动处理成一个连续碰撞问题,得到了能量不守恒以及加速度为g/3这一结论。
De Sousa和 Rodrigues[1,7]得出了共识:能量是不守恒的。他们首先用牛顿运动方程来描述两个变质量的子链的问题,考虑了地心引力,但不考虑链的拉力。他们得出了错误的能量不守恒的结论:加速度a=g。于是他们转换思路,假设能量守恒,这次他们得出了正确的结论。这也是我们所能找到的唯一正确的结论。
还有部分学者对下落链条的组成结构和底部冲击物进行探究,并对触发装置、接收装置进行了改进,参考[8]。
链条下落问题的本质是变质量体的动力学问题,变质量动力学在火箭推进系统,流体动力学,阿特伍德机,变质量振荡器中都有很多的应用,而链条的下落恰恰是最简单的变质量物体运动。如前文所述,自雅各布·伯努利用微积分解决悬链线的形状问题以来,前人对这类非连续性的动力学问题的处理方式一直是是利用连续性模型建立微分方程,再利用电脑进行离散化的数值分析,但是由于链条物理结构的特点,存在链节的横向摆动造成纵向收缩,单个链结本身发生的转动造成碰撞等复杂的运动形式,让连续性模型在很多地方的求解失效果[9]。本文旨在建立本就离散的物理模型,即若干根与地面呈一定倾角的棍子交错排列连接而成链条,主要研究其在下落过程中加速的奇特现象,探讨影响其加速度的相关因素,并试图把此模型在更多的场景下推广,并且争取在修正后能在工程上有所运用。
实际上,我们知道,计算机的高效计算的本质也是把链条进行了离散化处理,因此我们从第一种场景出发(如图1中的(a)所示),在理论和实验中直接将其进行了离散化,即把宏观上连续的绳子离散为交错相连的链条进行研究,此举相比于之前学者所研究的实验模型而言,更容易在数学上对其进行建模,能够从纯力学角度对其进行解释,且相关影响因素更为明显、更易测量。
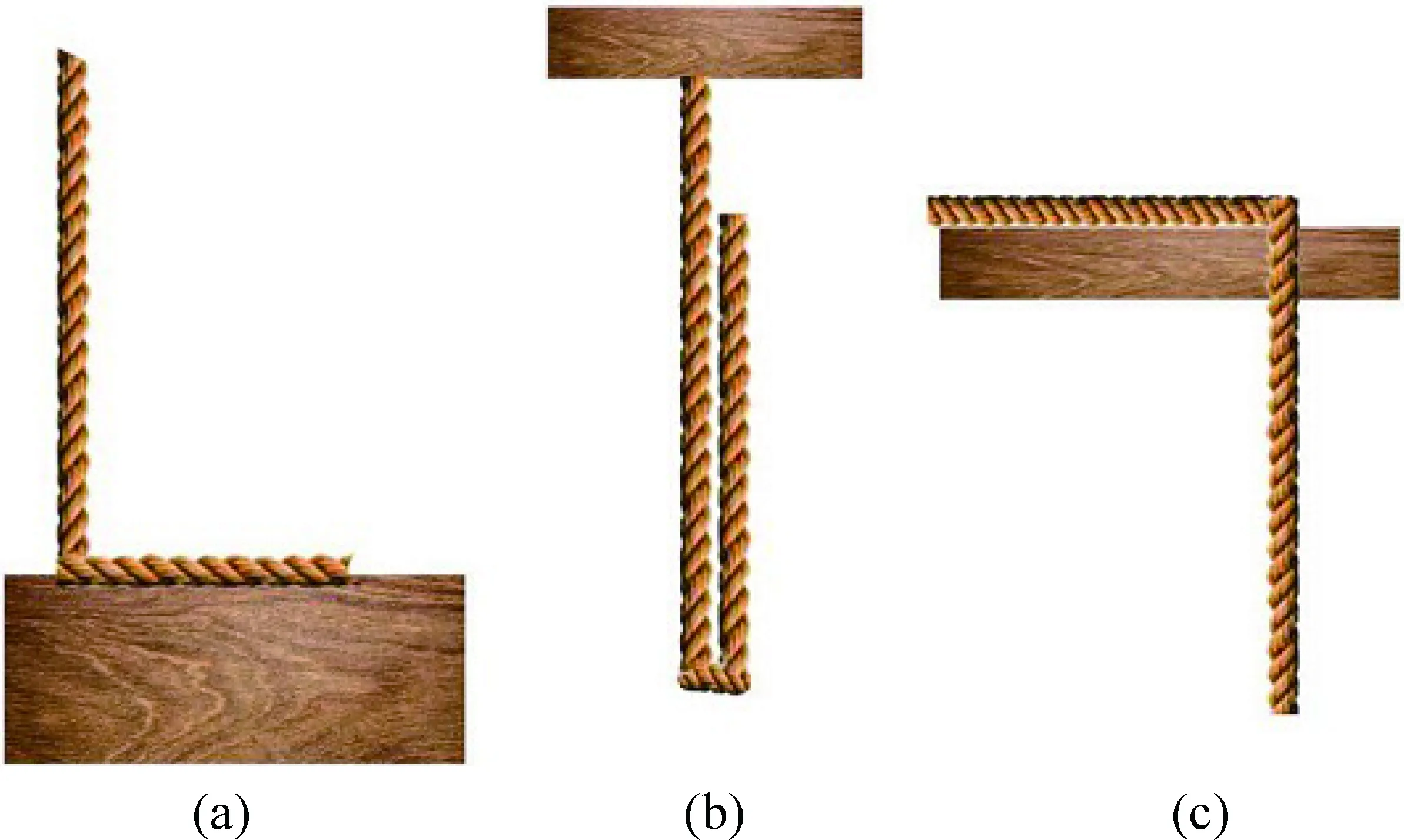
图1(a) 展现的是柔性绳索自由下垂状态下静止释放,下落,接触桌面并在其上堆积的过程; (b) 展现的是固定在天花板上的柔性绳索,提起其自由端再静止释放的过程; (c) 展现的是柔性绳索从桌面上开的小洞中下落的过程
1 连续性假设下对模型的讨论
最简单的模型一在很早的时候就被广泛讨论,在20世纪50年代以前,对此种状态下链条整体的加速度为g这一点深信不疑。这种理论是在连续性的假设下考虑dt时间内改变的动量为
dp=-pv2dt
(1)
从而计算出“动约束力”:
(2)
从而计算出理论上,如果将链条落于压力感应器上,会得出压力值:
F=f+mg
(3)
为了简单化验证的难度,假设此模型中绳子末端恰好接触地面,并结合式(1)~(3)有压力值为3倍链条重力。
早期的实验中也有验证了这一理论,这等于侧面证实了链条在此模型下的下落过程加速度等于g。但是链条实际的离散化特点以及电信号的延迟问题都对实验造成了误差。Hamm和Géminard[10]首次实实在在的在实验中验证了这一点。这说明在这个过程中链条下落的加速度是大于g的,同时在动力学上也暗示在下方堆积的链条表面存在着把链条向下拉拽的力。Grewal, Johnson and Ruina[11]定性且定量的描述了这样一个过程,并且指出这是因为离散的链条单元下接触地面是存在转动的效果。
于同旭[9]曾经提到链条的转动和链条的各种几何参数是决定链条下落过程运动特性的重要因素,后文中提到的链条模型,就是将这种离散化方法,并且定量研究相关参数对其影响。

图2 快链条模型
2 离散化理论模型
2.1 前提假设及涉及原理
本文假设所有棍子均为刚体,且整个运动过程中不受空气阻力的影响。在预实验过程中,观察到棍子下落会弹起,因此这里采用了非完全弹性碰撞的理论,考虑了恢复系数这一参量。建模过程中应用到了牛顿第二定律、冲量定理、冲量矩定理等原理。由于棍子只在碰撞的一瞬间发生加速度的突变,为了便于后期的实验观察,这里将这一离散过程连续化,也就是探究碰撞多次所叠加的等效加速度和速度,而不是瞬间碰撞的加速度和速度。
2.2 现象解释
将一根快链条从高处自由释放(如图2),棍子1与地面之间有一定的距离,直到棍子1碰地之前,快链条都做自由落体运动。当棍子1与水平面碰撞时,其发生速度突变,并且发生逆时针的微小转动,使得左侧轻绳被拉紧,右侧绳子处于松弛状态。碰撞结束后快链条又处于自由下落状态,直到棍子2发生碰撞。棍子2发生碰撞时,发生顺时针的微小转动,使得右侧绳子被拉紧,左侧绳子处于松弛状态。如此往复,发生棍子3、4直到棍子n的碰撞。观察发现这种瞬间的转动现象非常微弱,且最后顺时针逆时针转动可以互相抵消,因此可以将轻绳近似为竖直运动。
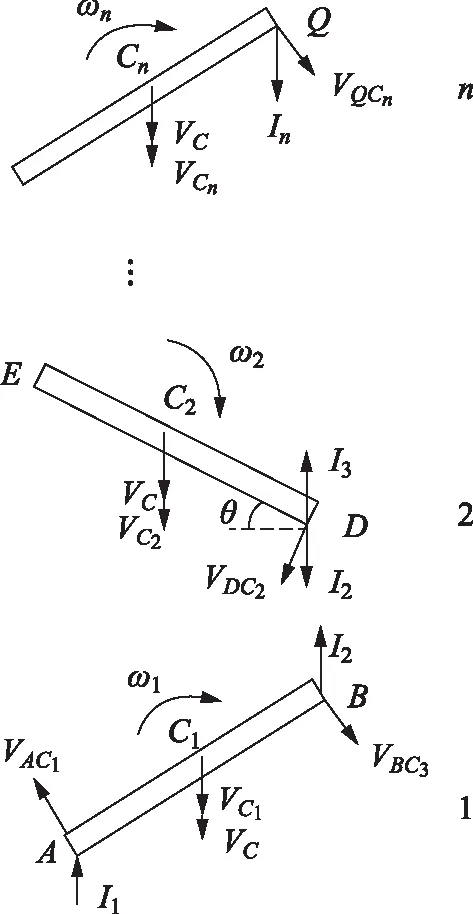
图3 快链条受力分析
由于每次碰撞都会发生速度突变,因此快链条的加速度一直在变大。棍子旋转时短边轻绳一端的相对质心的速度方向与棍子回弹时产生的速度方向相反,因此可以预料到的是,当棍子与水平面之间的倾角不断增加时,会有一个临界角度,使得该棍子碰撞产生的速度增量为零,或者为负值,此时快链条两边的轻绳都处于松弛状态,不受力的作用,因此加速度一直为重力加速度,不出现“快链条”现象。
2.3 数学模型
首先考察棍子1发生碰撞时快链条的运动状态,可以写出碰撞的恢复系数,参考图3:
(4)
由于碰撞所产生的角速度为
(5)
写出角动量公式和冲量公式:
补充运动关系式:
(8)
B点在竖直方向上的绝对速度为
VBy=VB C1cosθ+VC1
(9)
接下来写出第2根、第3根……直到第n根棍子的方程,其中同一短绳连接的两根棍子的端部竖直速度相等
(10)
化简可以得到棍子1直到棍子n的运动状态以及质心速度:
并且可以求解出每根棍子的转动角速度为
整理得每根棍子的角速度和质心速度为
(19)
因此可以得到碰撞时突变的速度为
(20)
引入常数k,k只与恢复系数e、棍子与地面的夹角θ,棍子总数n有关。
当速度差大于零时加速下落,为“快链条”,速度差小于等于零时,绳子处于松弛状态,因此链条仍为自由下落。
此时的临界角度为
(21)
也就是说,当倾角小于54.7°时,链条做加速下落运动,等倾角大于54.7°时,链条做自由下落运动。
但这里需要注意的是,倾角为零的情况并不适用与这里的分析,因为本文考虑的是单点碰撞,而倾角为零的情况比较复杂,在理想条件下棍子与地面发生的是线碰撞。
接下来考察第Q号棍子(Q>P)的运动情况。令质心距为h,棍子1的质心距地面高度为H,则
(22)
第一次碰撞前棍子Q的质心速度:
(23)
第一次碰撞后棍子Q的质心速度:
(24)
第二次碰撞前棍子Q的质心速度:
(25)
第二次碰撞后棍子Q的质心速度:
(26)
第P次碰撞前棍子Q的质心速度:
(27)
第P次碰撞后棍子Q的质心速度:
(28)
从释放至第P次碰撞过程中的等效加速度为
(29)
第P次碰撞时的速度V为
(30)
由此确定影响加速度和速度的因素有七个,分别是恢复系数e,碰撞次数P,棍子质心距h,棍子长度l,棍子根数n,起落高度H,棍子与水平面的夹角θ。
3 仿真模拟
为了直观的看到快链条“快”的特性,历史上也采用过不同的方法,于同旭提到过用平滑滤波消除实验噪声观察测量台面度数的方法,但是这种方法并没有直接体现出“快”的特性。
也有实验[12]将链条和刚性小球在同一高度同时释放,通过在图像来对比各个阶段两物体的相对位置来确定链条油加速现象。
图4 图像观察到的快链条现象
但我们发现这种方法存在两个问题。
(1) 小球和链条整体受到的空气阻力不同,在实验进行的过程当中,我们可以明显地看到由于空气阻力的存在,连接链条间的绳子会出现明显的弯曲现象,而单纯的用绳子穿过一组质量较大的小球便没有这样的现象(图4)。从理论上来说,球体的迎风面积较小,而链条每个链节的迎风面积都比较大,另外起连接作用的绳子本身受到的空气阻力也是很大的。
(2) 小球和链条在释放的时候同步性难以保证,需要比较精确的释放装置。
我们注意到这样的加速现象实际上和与地面的碰撞过程紧密相关,所以我们设计了一组仿真实验,并且利用直观的沙盘式仿真软件软件Algoodoo进行了过程模拟,比较直观地展现了加速现象,也很直接地显示了这种加速现象和链条与平台的碰撞相关性(图5和图6)。
图5 Aldogoo快链条模型
图6 Algodoo快链条仿真
定量研究方面,我们根据理论进行了如下的仿真模拟。
考虑到空气阻力及释放方式等带来的较大误差,我们在这里的仿真分析将不考虑快链条效应下的自由落体加速度的值设置为预实验条件下测得的快链条加速的近似值9m/s2。
图7中,灰线表示快链条加速度,黑线表示快链条的速度,虚线表示自由落体加速度,点线表示自由落体的速度。图7纵坐标只表示数值而不考虑单位。
图7 碰撞次数对加速度、速度的影响
3.1 碰撞次数P对快链条运动状态的影响
在控制其余参数不变的情况下根据式(29)和式(30)做出图7,图中灰线是快链条加速度,可以看到在此条件下维持在11m/s2左右,虚线则是不考虑快链条效应下的加速度。相应的速度如图中黑线和点线所示,可以看到明显的“加速”效应。
图8 与地面夹角对加速度、速度的影响
3.2 棍子与水平面的夹角θ对快链条运动状态的影响
从图8可以直观地看到快链条的加速度和速度大小随着其杆与地面夹角的变化成波动的形态,并且约以5°为一个周期。整体呈下降的趋势,并且在54.7°左右时和正常下落加速度无异。
这里需要注意的是,0°时的情况并不在本文式子所适用的条件范围下,上文有说明。
3.3 恢复系数e对快链条运动状态的影响
由图9中可以看到快链条加速度和其与碰撞面间的摩擦因素存在一定的正相关性。
3.4 起落高度H对快链条运动状态的影响

图10 起落高度对加速度、速度的影响
从图10中可以看到起落高度越高,快链条的加速度越大,但是此函数存在凹性让起落高度对其加速度的影响随高度值增加越来越小。
3.5 棍子长度l对快链条运动状态的影响
从图11灰色曲线可以看到快链条加速度随着棍子长度的增加而减小。
图11 木棍长度对加速度、速度的影响
3.6 棍子质心距h对快链条运动状态的影响
从图12可以看到快链条加速度随着棍子质心距的增加而增大。
图12 中心距对加速度、速度的影响
3.7 棍子根数n对快链条运动状态的影响
图13 棍子根数对加速度、速度的影响
从图13可以看到快链条加速度随着其棍子根数的增加而减小。
4 实验
之前的很多理论和实验重心[12-16]放在力上,前文也提到了这种方法由力传感器的产生的误差比较大。R.Moreno, A.Page[17]提出用视频直接分析运动的方式来研究此类变质量物体的运动特性,他研究的是如图14所示的情形,取得了比较好的结果。
图14 视频分析法
我们把这种方法运用到我们的情形中进行如下实验。
实验装置与实验环境如图15和图16所示。
实验所用的木棍直径均为1cm,长度随实验的不同而定,木棍采用没有弹性的鞋线连接,木棍与绳子之间采用热熔胶连接固定。

图15 实验装置与实验环境1

图16 实验装置与实验环境2
用每秒240帧的摄像机录下链条下落的整个过程,导入到Tracker软件中分析,如图17所示。
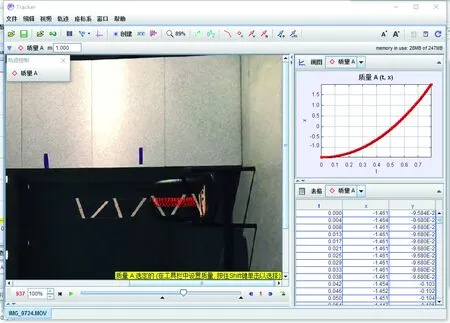
图17 实验视频及实验数据分析1
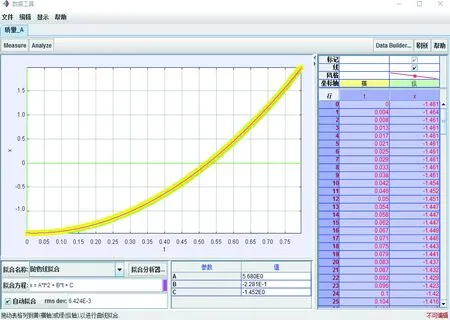
图18 实验视频及实验数据分析2
首先我们制作了木棍总数为16,木棍长度为0.25m,中心距为0.2m,棍与地面夹角约呈27.8°的链条。并且通过增垫不同类纺织品设置恢复系数e=0.01,连接释放长度调整绳控制起落高度H=1来控制实验环境与仿真相符。根据Tracker逐帧的速度,加速度数据采集可以得到如图12所示的散点图,与仿真曲线对比可看到在碰撞次数小于6时实验数据和仿真符合较好,碰撞次数较大后出现的数据会因底端堆积木棍的增加所造成的二次碰撞等因素失真。
当固定碰撞次数为10次,其他参数不变时。通过连接于释放端的绳和掉落端的标尺来调整起落高度,得到了如图13的实验结果,与仿真模拟符合较好。
当固定起落高度为1m,其他参数不变时,制作了4组不同中心距的木棍,经过多次试验得到了如图14的实验结果,与仿真模拟符合较好。
当固定中心距0.2m不变(此处由于增加木棍根数带来的长度增加,考虑到场地限制的情况下采用较小的中心距)。在其他参数不变的情况下制作了木棍根数分别为16,19,22,26,30的链条。实验所得图像15仍可以看到随着木棍数量的增多,实验数据存在失真的情况。
由于碰撞恢复因素和棍子长度控制涉及比较大的工作量,暂时未进行实验探究。
在做实验的过程中,我们能够容易发现地面堆积的木棍会对整个快链条有所影响,这里并没有测量地面恢复系数,是因为在木棍堆积了几根之后,上方的木棍再落下来时,已经触碰不到下面的地面了,因此只在木棍与木棍之间发生碰撞。但木棍碰撞的情况确实比较复杂,因此这里不考虑堆积的情况。
表1和图19是碰撞次数的实验结果与数值仿真结果的对比。

表1 碰撞次数与加速度、速度的关系
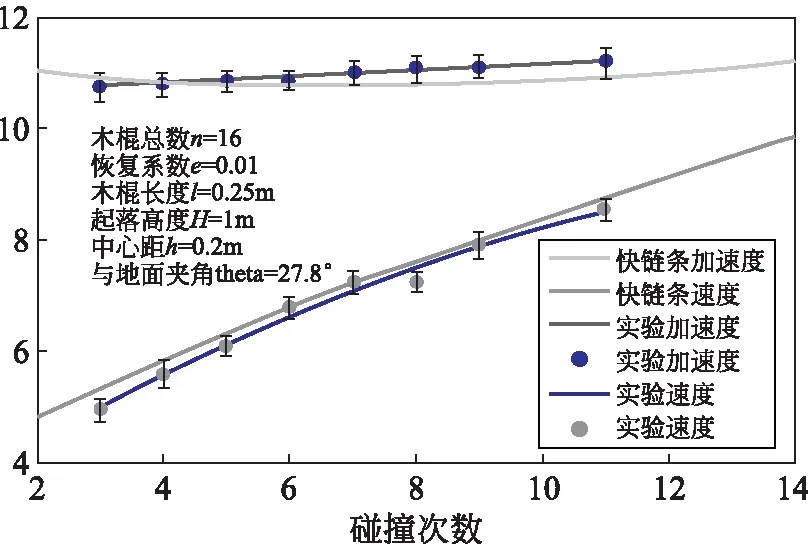
图19 碰撞次数与加速度、速度的关系
表2和图20是起落高度的实验结果与数值仿真结果的对比。
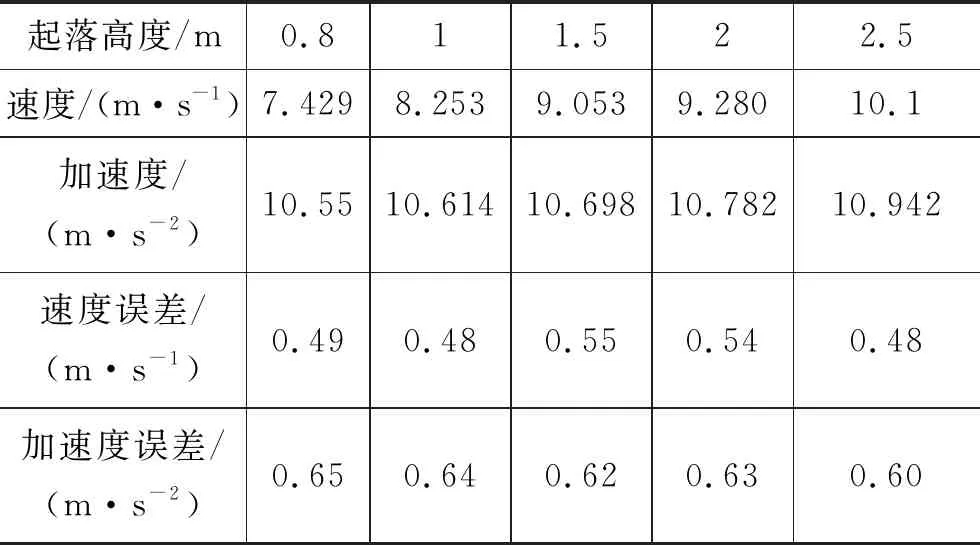
表2 起落高度与加速度、速度的关系
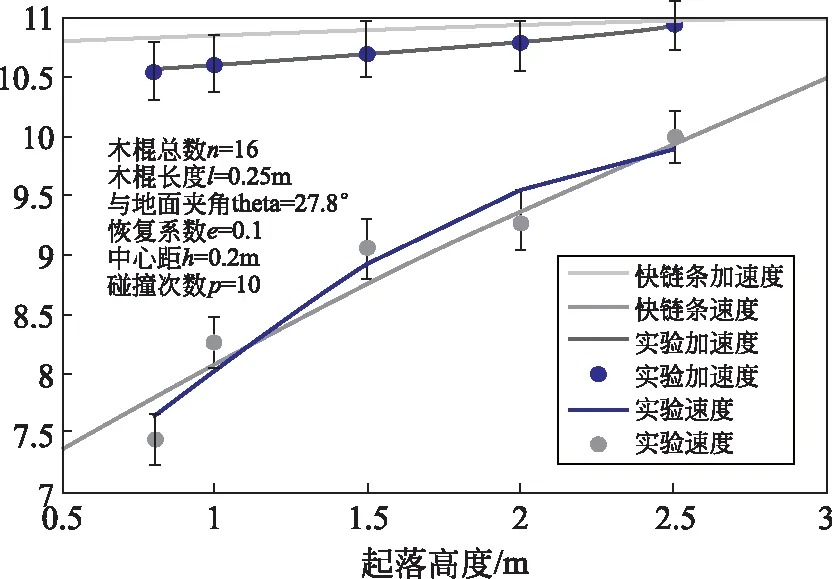
图20 起落高度与加速度、速度的关系
表3和图21是中心距的实验结果与数值仿真结果的对比。
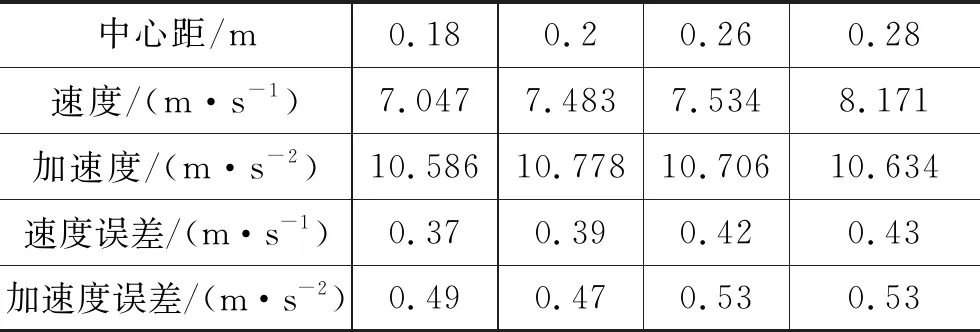
表3 中心距与加速度、速度的关系
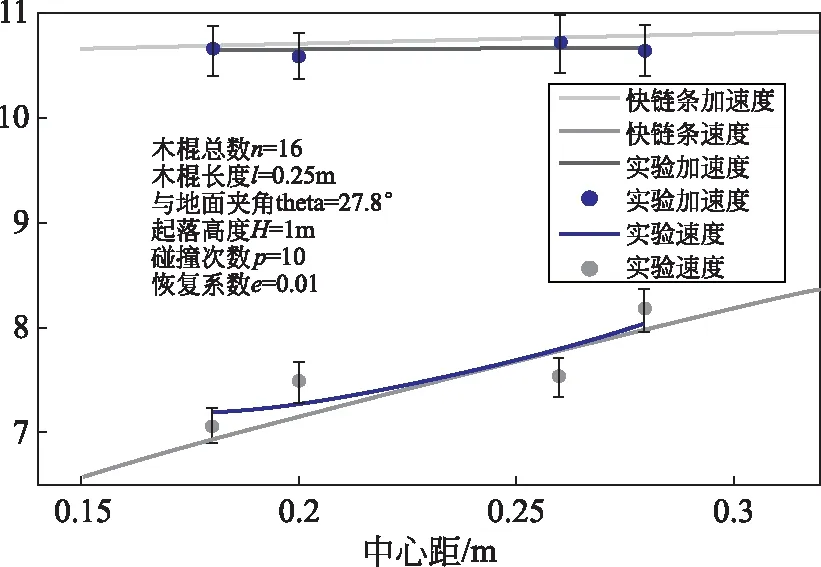
图21 中心距与加速度、速度的关系
表4和图22是木棍总数的实验结果与数值仿真结果的对比。
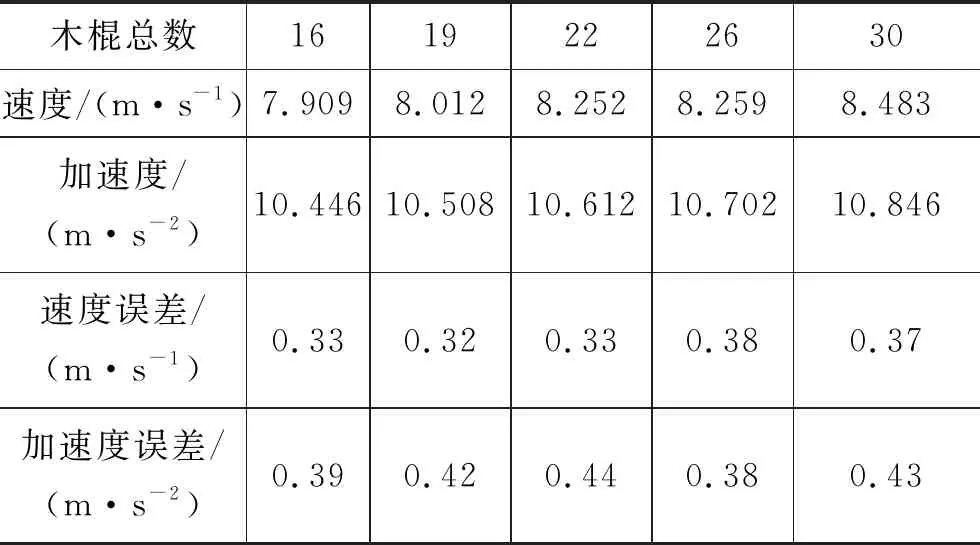
表4 木棍总数与加速度、速度的关系
5 结论
本文章通过回顾里维柔性物体力学问题的发展历程,发现在一些场景中“连续性”假设失效带来的问题,于是尝试构建离散的物理模型,重点研究此物理模型下落的力学特性。通过预实验验证了快链条现象的存在,建立了快链条的数学模型,推导出快链条下落的加速度、速度与相关变量的关系表达式,并做了一定的仿真分析。通过多组实验定量研究了恢复因数、木棍总数、木棍长度、木棍倾角、木棍中心距、起落高度等因素对快链条下落的加速度和速度的影响,并实验论证了理论的正确性。
空气阻力,地面木棍堆积,绳子与木棍连接处热熔胶,下落高度,Tracker帧数和数据处理等存在的误差等会导致部分实验数据点偏离理论曲线的况,这些都将造成实验数据和理论分析不能严格吻合。
关于木棍堆积产生的误差,实验时也有采用过在下方垫一块三角木块,使得木棍落下来之后能滚下去,但是这又会产生斜碰撞的问题,增加了分析的理论难度,因此希望能够在以后的研究中优化对这些误差的处理,做更加精确的实验或者在理论中尝试添加新的误差项。本文只做出了一种情形的链条的“离散化分析”,同样可以按照同样的方法,研究其他下落情形的链条的特点。
最后,本文做了一些猜想,当木棍长度足够小时,木棍可以近似为一个有质量的质点,这时不会发生类似于木棍碰撞地面时产生的微小旋转,不存在对绳子的拉扯,因此质点链条仍然会以自由落体的方式向下坠落。而如果在质点的基础上,把轻绳的长度减小为零,也就是有质量的点直接连接在一起,成为一根连续均质量的链条,这时候的情况很复杂,因为链条的堆叠会对链条产生十分大的影响,例如碰撞时链条上的点会向水平方向运动,从而拉动正在下落的链条,导致加速度的增大。此处只是提供了这样一种假设,后续可对此种链条进行研究。
本文最想强调的还是在研究链条问题时的一种新思路,既抛弃连续性假设和微分方程的经典方法,转而寻找合适的离散物理模型定量研究问题。
猜你喜欢
数学小灵通(1-2年级)(2023年3期)2023-03-20 11:48:08
动漫界·幼教365(中班)(2021年3期)2021-04-06 14:25:32
小资CHIC!ELEGANCE(2021年46期)2021-01-11 05:24:50
趣味(语文)(2020年6期)2020-11-16 01:45:16
中国自行车(2020年2期)2020-04-26 09:59:45
疯狂英语·初中天地(2019年9期)2019-10-08 08:04:46
当代陕西(2019年17期)2019-10-08 07:42:12
当代陕西(2019年13期)2019-08-20 03:53:56
中学生天地(A版)(2019年3期)2019-04-19 14:03:48
汽车维修与保养(2015年8期)2015-04-17 03:32:55