
桁架式机械手伺服电机选型
2019-07-08 08:49蒲军
制造业自动化 2019年6期
蒲 军
(陕西法士特汽车传动集团公司,宝鸡 722409)
0 引言
桁架式机械手也叫龙门式机器人,属于直角坐标机器人的一种。针对机械加工行业所设计的桁架式机械手与数控机床相结合,可以实现在该设备或多设备之间的工件自动抓取、上料、下料、工件转序加工。本文所述的桁架机械手由一个水平轴X和其上安装的两个垂直Z1、Z2轴构成,用于重型卡车变速器Ⅱ轴剃齿工序。
动作顺序:Z1、Z2轴上升回到“Home”位置→X轴移动使Z1轴到达上料位上方→Z1轴下降抓取工件然后上升→Z2移动到剃齿机1上方→Z2轴下降抓取工件然后上升→Z1移动到剃齿机1上方→Z1轴下降放下工件然后上升→Z1移动到剃齿机2上方→Z1轴下降抓取工件然后上升→Z2轴移动到剃齿机2上方→Z2轴下降放下工件然后上升→Z2移动到剃齿机3上方→Z2轴下降抓取工件然后上升→Z1移动到剃齿机3上方→Z1轴下降放下工件然后上升→Z2移动到下料位上方→Z2轴下降放下工件然后上升→Z1轴再次移动到上料位上方,上下料及转序完成,等待下一次循环。
为了满足该桁架机械手高速度,高精度的运动的要求,驱动装置选用交流伺服电机。如果在电机选型过程中,盲目选择大规格的电机,不仅会增加成本,也会使设备体积过大而造成结构不紧凑等问题。因此,选择电机时应综合考虑各方面要求,以充分发挥伺服电机的工作性能。下面以该桁架伺服驱动电机的选取为例介绍伺服电机的选型方法。
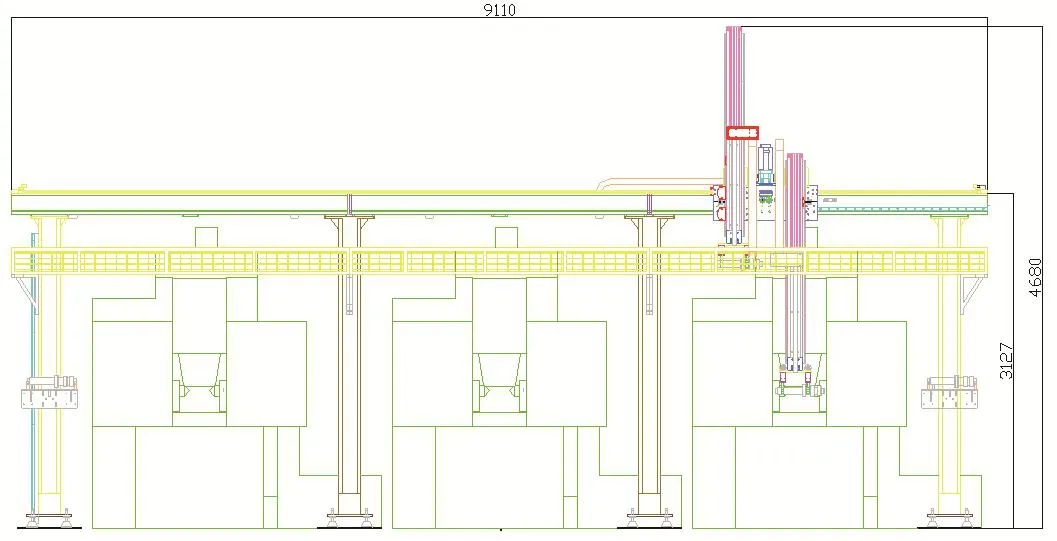
图1 桥架式机械手结构图
已知:X轴运动部分重量Mx=300kg,齿轮齿条传动,要求最大速度Vxmax=2m/s,加减速时间tx加减=0.4s。
Z1、Z2轴运动部分重量均为Mz=90kg,齿轮齿条传动 ,要求最大速度Vzmax=2m/s,加减速时间tz加减=0.4s。
1 伺服电机额定转速及减速比选取
伺服电机通过减速机提高输出轴的扭矩满足桁架机械手重载运行的要求,同时降低输出轴转速使电机能够工作在额定转速附近,充分发挥电机的性能。该桁架要求高运行速度、高响应速度,所以选择低惯量型伺服电机,额定转速n=3000r/min。下面来计算X、Y轴的减速机减速比:
X轴驱动齿轮:模数mx=2.5,齿数zx=42,分度圆直径dx=mx.zx=0.105m。
X轴驱动齿轮设计最高转速:

X轴减速比:n/nx=3000÷364=8.24,所以减速比选取:ix=8。
Z轴驱动齿轮:模数mz=2.5,齿数zz=30,分度圆直径dz=mz.zz=0.075m。
Z轴驱动齿轮设计最高转速:

Z轴减速比:n/nz=3000/510=5.88,所以减速比选取:iz=5。
2 伺服电机扭矩和功率选取
该桁架机械手X轴采用双直线导轨,四滑块结构。综合考虑安装状态和滑块刮油板产生的运动阻力,确定摩擦系数μx=0.1。
X轴匀速时驱动力:

齿轮齿条传动效率:η齿=95% ,减速机传动效率:η减=97%。

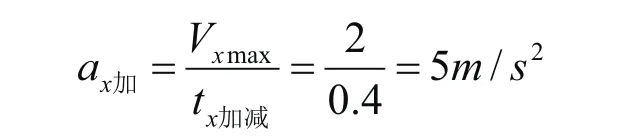
X轴匀速时电机扭矩:X轴线性加速,速度从静止加速到2m/s需要0.4s,
所以X轴加速度:
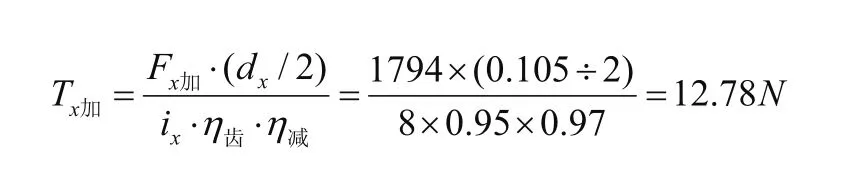
X轴加速时驱动力:

X轴加速时电机扭矩:
X轴线性减速,速度从2m/s减速到静止需要0.4s,所以X轴减速度:

X轴减速时制动力:

X轴减速时电机扭矩:

设备连续运行时所需要的扭矩,一定要小于电机的额定扭矩。电机的最大扭矩表示的是电机的瞬时过载能力,主要是在设备加减速时瞬时达到,不能长时间输出。为满足X轴加速时电机扭矩Tx加=12.78N的要求,从伺服电机样本中查得,X轴应选额定功率为3kW的伺服电机,其额定扭矩9.55N/m,瞬时最大扭矩28.65N/m,额定转速3000r/min,满足要求并留有余量。
Z轴为垂直轴,V型滚轮导向,齿轮齿条传动。V型滚轮系统的摩擦系数μv=0.02,预紧力150N,V型滚轮摩擦力Fz摩=150×0.02=3N,远小于Z轴的重力。电机主要克服重力使Z轴上下运动,为简化计算将摩擦力忽略不计,设重力方向为正方向。
Z轴匀速或静止时电机驱动力:

Z轴匀速或静止时电机扭矩:

因为加速度的方向与作用在物体上的合力方向一致,所以在Z轴下降加速度与上升减速度时合力方向相同,az下加=az上减=5m/s2。同理,下降减速度与上升加速度az下减=az上加=-5m/s2。
Z轴下降加速时电机驱动力:

Z轴下降加速时电机扭矩:

Z轴下降减速时电机驱动力:

Z轴下降减速时电机扭矩:

Z轴上升加速时电机驱动力:

Z轴上升加速时电机扭矩:

Z轴上升减速时电机驱动力:

Z轴上升减速时电机扭矩:

为满足Z轴下降减速和上升加速时电机扭矩TZ下减=TZ上加=-10.84N的要求,同样需要选择额定功率3kW的伺服电机,而且为了防止断电后Z轴在重力作用下下落,伺服电机还需要带有机械刹车装置。
3 负载惯量与电机惯量匹配
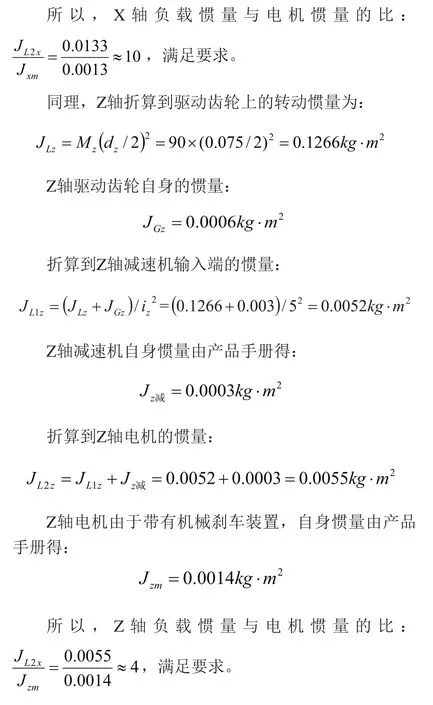
在伺服系统选型时,需要计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求来具体选择具有合适惯量大小的电机。在设计时,选择正确惯量比是充分发挥机械及伺服系统最佳效能的前提。像该桁架这样高速,高响应的系统一般要求负载惯量与电机惯量的比值在3~20之间。该系统惯量比计算过程如下:
X轴为齿轮齿条传动,折算到驱动齿轮上的转动惯量:

4 结论
在明确桁架结构和性能指标的前提下,首先确定电机的额定转速,高速桁架应该选择低惯量高转速的电机,而低速重载的桁架则可以选择中高惯量的电机。根据桁架最大速度计算出伺服电机减速机的减速比,然后依据负载情况计算出电机应具有的额定扭矩,最后校核负载惯量与电机惯量的匹配。根据上述方法所选伺服电机在桁架上运行良好,并实现了所要求的运动特性与定位精度。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
电力自动化设备(2022年8期)2022-08-09
现代电力(2022年2期)2022-05-23
哈尔滨轴承(2020年3期)2021-01-26
微特电机(2020年11期)2020-12-30
电子制作(2019年13期)2020-01-14
环球时报(2019-07-18)2019-07-18
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
