基于无人机影像的城市绿地提取分析
2019-07-07 01:12:22吴卓恒
四川林业科技 2019年6期
吴卓恒,徐 霞,陶 帅
(四川师范大学 地理与资源科学学院,四川 成都 610101)
伴随无人机技术的高速发展,无人机广泛应用在精准农业[1]、测量[2~3]、环境监测[4]、生物量估算[5]等方面。相比卫星影像,无人机影像具有分辨率高、大气影响小、获取灵活高效等优点[6]。但目前应用于无人机的遥感技术尚不完善,主要弊端在于续航能力弱、搭载传感器波段少等。
随着人们对于生活环境质量要求越来越高,城市绿地作为现代化城市的重要组成部分,已成为衡量城市人居环境的关键性因子,度量一个城市绿化水平的高低通常用城市绿地覆盖率来进行量化比较。对于城市绿地覆盖率的传统统计方式主要依靠随机设置样方进行人工实地调查,这种统计方式得到的结果存在大的随机误差,且耗费人力物力。目前通过卫星遥感影像提取NDVI[7~9]进行估算是较为普遍的统计方式,此方式具有效率高、成本低等优势,但同时也具有影像受大气影响大、提取精度不高等短板,因此适用于大面积、精度要求不高的绿地提取统计。而对于小面积、精度要求较高的绿地提取,无人机遥感相比之下具有巨大潜力。
学者主要采取像元分割[10]与面向对象分割[11]两种方式对无人机影像进行预处理, 基于无人机影像的光谱特征[10~14]构建各种可见光植被指数用于量化提取植被信息,并结合该区域空间特征[13]、纹理特征[14],以剔除与植被光谱特征相似的非植被信息。但由于地物光谱具有同物异谱与同谱异物的特性,不同地区空间特征与纹理特征也不具有相似性,因此有必要对其做进一步研究。本文选取北川县城区作为研究区,基于影像的光谱特征,根据VDVI、NGRDI、NGBOI分别进行植被信息提取,并随机生成检测点,建立混淆矩阵分别从生产精度、用户精度与总体精度探究3种不同可见光植被指数在城市绿地提取应用中的优劣性。在上述结果的基础上,通过目视解译对提取结果进行局部修改,提取出符合精度要求的城市绿地信息,并据此计算出北川县建成区的城市绿地覆盖率。
1 研究区概况与数据获取
1.1 研究区概况
北川县地处四川盆地与青藏高原交接的龙门山区,地理坐标31°35′~31°38′02″N,104°26′15″~104°29′10″E。本文选取北川县新建区城区(永昌镇)作为研究区。研究区位于北川县东南部,地处安昌镇与黄土镇之间,距绵阳市 35 km,属亚热带季风气候,年均气温15.6 ℃,年均降水量 1 400 mm,地势中间较平坦,四周为低山丘,海拔545 m~640 m,土壤以黄壤为主,存在部分黄棕壤,其自然条件利于亚热带常绿阔叶林、落叶混交林生长。目前应用于北川新县城的园林绿化树种137种,常见树种78种,主要包括银杏、桂花、木芙蓉、香椿等[15];绿地类型包括公园绿地、防护绿地、广场绿地、附属绿地与区域绿地[16]。地理示意图如图1。
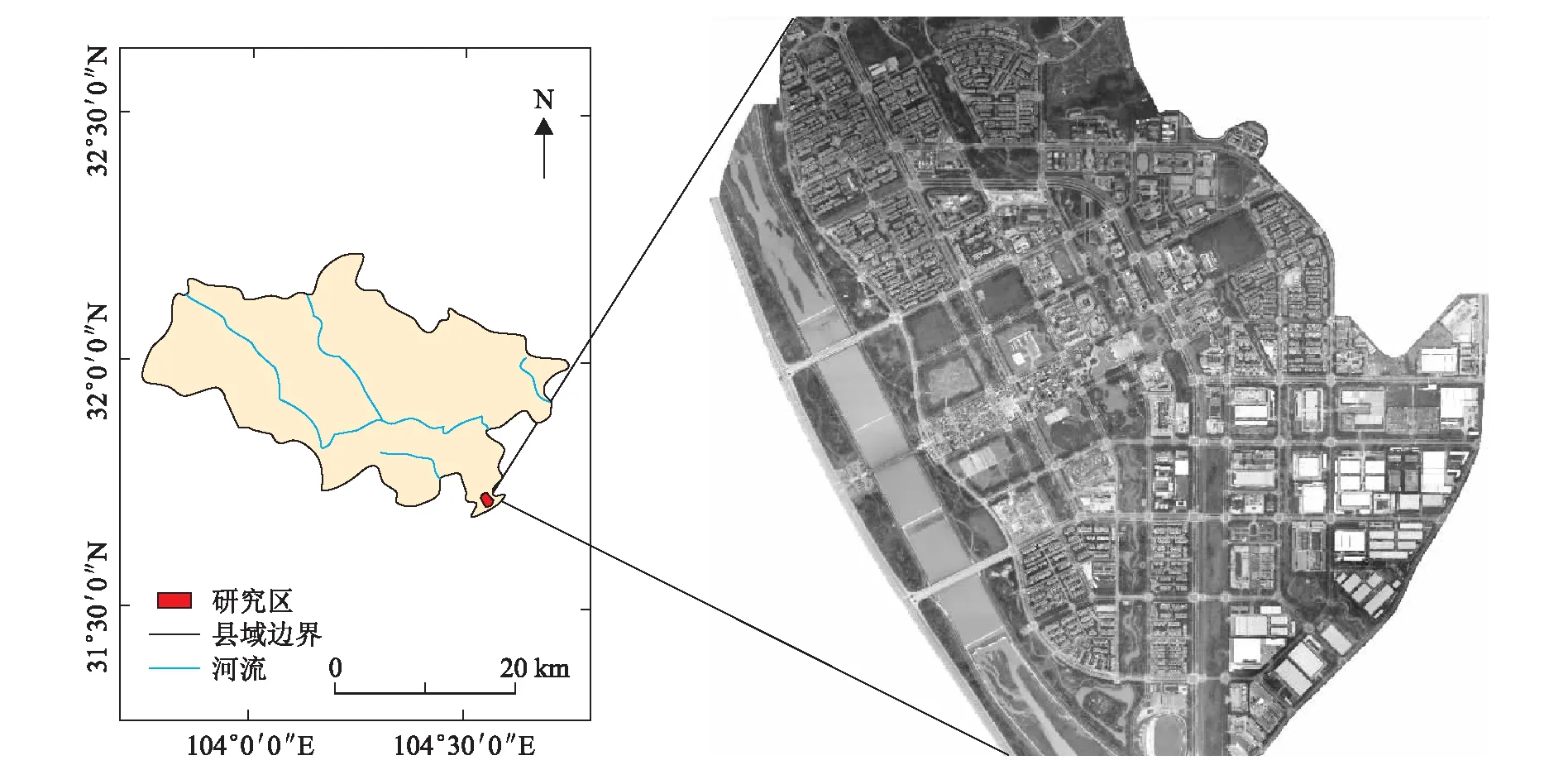
图1 北川县地理示意图
1.2 数据获取
本文采用大疆四旋翼无人机Phantom 4 Pro V2.0,重量为 1 368 g,搭载 2 000万像素CMOS传感器,设计飞行高度为500 m,航向重叠度为70%,旁向重叠度为60%,设计航线4条,航飞总面积约5.98 km2,影像拍摄时间为2018年10月25日15:30分—17:30,天气状况为晴朗微风,空气能见度较高。最终获取影像342张,影像具有红、绿、蓝 3个波段,空间分辨率为0.15 m,内业选用Pix4D软件生成研究区正射影像,数据处理流程如图2所示。

图2 数据处理流程图
2 主要研究方法
2.1 可见光植被指数
在提取城市绿地之前需先了解研究区植被的光谱特征,目前遥感中常用植被指数主要是归一化植被指数(normalized difference vegetation index,NDVI)以及比值植被指数(ratio vegetation index,RVI)[17],由于无人机影像仅包含可见光波段,无法运用近红外波段进行运算求取上述指数,因而本文选用可见光波段差异植被指数VDVI[12],归一化绿红差值指数NGRDI[18]、归一化绿蓝差值指数NGBDI[10]进行区分植被,计算公式如下:
(1)
(2)
(3)
式中Pred,Pgreen,Pblue分别代表影像红、绿、蓝波段的像元值或反射率。各植被指数中,VDVI和NGRDI、NGBDI 值域均在[-1,1]间,且值越大的区域表示该区域城市绿化覆盖度越高。利用上述式(1)~式(3)分别计算各植被指数,得到各植被指数计算结果,如图3所示。

图3 各植被指数计算结果
2.2 面向对象分类
面向对象多尺度信息提取技术是一种基于高分辨率影像的光谱、纹理、形状等特征,以对象为基本单元,通过模糊逻辑的统计系统进行高精度分割提取的分类方式。本文采用ENVI软件对影像进行多尺度分割提取。为了提取城市植被信息,首先要了解其光谱反射特征与非植被信息的差异。由于城市绿地中既包含大片的公园绿地,也包含零散的行道树与草地,不同植被类型具有不同的光谱特征。为更好地统计不同植被指数所能反映城市绿地的差异,本文在不同植被指数的基础上,通过目视解译不同植被区共选取100个样本点并分别统计其像元值(见表1),并采用单因素方差分析探究3种植被指数之间的差异性(见表2)。从表1与表2综合分析可知:单因子(3种植被指数)单变量(植被反射率)的F检验值为0.506,其中P-value=0.603>0.05,F检验不显著,说明3种植被指数反映植被信息的能力差距并不显著;而植被反射率均值越大表示绿地信息与非绿地信息分离度越高,标准差越小表示绿地光谱信息越集中,NGRDI与VDVI分别均值与标准差相对占优,分类效果相对较好,这点在后文中得到验证。
表1 VDVI、NGRDI、NGBDI统计特征值
Tab.1 Statistical eigenvalues of VDVI, NGRDI and NGBDI

植被指数均值标准差均值的95%置信区间下限上限极小值极大值VDVI0.0667 0.04380.06460.0970-0.080.37NGRDI0.07720.06130.07780.1003-0.060.20NGBDI0.05840.04820.05350.0836-0.030.19
表2 单因素方差分析
面向对象提取需要对影像进行分割,影像分割的好坏与否同样关系最终分类结果,分割尺度太小会造成影像破碎,引起椒盐现象,尺度太大易造成不同地物归为一类,引起错分漏分。本文采用多尺度分割,通过反复实验与观察,设定分割阈值为35,合并阈值为90,使得最后分割结果基本保持原有地物特征(见图4)。

图4 多尺度分割结果
影像分割后结果可直接用于目标地物提取,基于植被光谱、纹理、空间特征可设定不同规则进行分类。由于本文旨在比较3种可见光植被指数差异,因此仅设定光谱特征规则,具体为设定合适的阈值,将大于该阈值的对象归为城市绿地,小于该阈值的对象归为非城市绿地。本文选用5%经验模型[19],即统计累计像元数最接近5%的像元值设为阈值,并添加规则标准差大于0.02以剔除部分与植被光谱特征相似的非植被信息。各植被指数提取城市绿地结果如图5所示。

图5 各植被指数提取结果
2.3 精度评价
通过目视解译对比,发现3种植被指数均能提取出大多数城市绿地信息,但仍存在部分错分漏分现象。为使提取结果能够量化比较,在3种植被指数提取结果基础上分别随机生成200个样本点进行校验精度。由于无人机影像分辨率较高,可直接根据正射影像目视判别植被信息与非植被信息,判别结果生成混淆矩阵,用于城市绿地信息提取结果的精度评价。
表3 3种植被指数精度评价结果
Tab.3 Accuracy evaluation results of three vegetation indices

参考数据生产精度用户精度总体精度Kappa系数VDVI92.478689.50.8099NGRDI91.6688860.7543NGBDI83.178483.50.7167
混淆矩阵常用于遥感影像分类结果的精度验证,提供了4项指标,分别为生产精度、用户精度、总体精度以及kappa系数,前3项指标值域为0~100,kappa系数值域为-1~1,且4项指标均属于正向指标,即值越大代表影像分类精度越高。
由表2可看出,3种植被指数提取精度均较高。首先从生产精度来看,该数值用于观察影像的错分误差,从表中可看出VDVI与NGRDI生产精度均超过90%,说明上述指数中对于植被的错分现象较少,从采样结果中看出错分现象主要为与城市绿地光谱特征相似的建筑或道路,如操场、浅绿色的屋顶等;而NGBOI错分现象相对较多,主要是因为该指数对于水体与绿地的区分能力较小,导致许多水体被归为城市绿地。从用户精度来看,该数值用于观察影像的漏分误差,从表中可看出3种植被指数差别较小,说明均存在一定的漏分现象。通过样本观察,原因一是由于一些植被(如紫叶李)光谱特征异于一般植被;原因二是因为部分草地刚被修剪以至于植被特征不明显;原因三是影像中的阴影区给影像分类带来噪声影响。从总体精度来看,该数值代表影像总体分类效果,3种植被指数提取精度均在83%以上,若在影像自动提取的基础上进行少量的人工目视校正,其结果可满足城市绿地统计要求。从kappa系数来看,VDVI一致性较高,说明分类可靠性较强;而其余两个植被指数一致性较差,可靠性相对较弱。
3 分类后处理
由于分类后的结果尚存在一些错分漏分现象,如学校的塑胶操场,光谱和纹理特征都与植被极其近似,导致被错误归类到城市绿地。以及存在一些分类正确但面积太小且与周围地物不一致的对象,如草坪中受外界影响导致草类长势不好的区域,形态上近似裸地,但这小片区域并不能真实反映这块区域的土地覆被类型,因此应将其重新归类。
3.1 目视解译修改
对于塑胶操场和个别建筑与构筑物这类面积较大但数量较小且难以通过光谱、纹理特征剔除的错分对象,采用对照影像进行目视解译的方法进行局部修改。选用分类总体精度最高的VDVI分类结果为基础,利用ENVI Class软件通过目视解译将错分漏分区域进行更正。
3.2 小斑块去除
对于虚假像元引起的小图斑,目前常用处理方法包括Majority/Minority分析、聚类处理(Clump)和过滤处理(Sieve)[20]。3者区别在于Majority/Minority分析是通过类似于卷积滤波的方法将一定区域内占主要/次要地位的像元类别来代替中心像元的类别;聚类处理通过腐蚀或膨胀将临近的类似分类区域聚类以平滑影像中的斑点或洞;过滤处理通过斑点分组的方法来解决影像中的孤岛问题。由于3种方法的功能各有侧重,本文综合运用3种方法使分类结果更加精确:首先采用Majority分析工具去除影像中大部分斑点噪声,再使用聚类处理中膨胀工具使影像更加平滑,最后利用过滤处理工具处理仍存在的孤岛像元并进行重新归类。
3.3 城市绿化覆盖度计算
在更正结果基础上随机生成100个采样点验证其精度,当满足连续3次验证结果总体分类精度均大于95%时,将其进行矢量化以统计面积。统计得出研究区内城市绿地面积为2.3948 km2,已知研究区面积为5.9764 km2,依据公式(4)[16]可得到研究区城市绿化覆盖率为40.04%。将最终分类结果叠加原始影像输出最终结果为图6。

图6 研究区城市绿地分布图
(4)
式中,G为城市绿化覆盖率,P为城市内5大类绿地面积总和,A为城市用地面积。
4 结论
相比传统的城市绿地信息提取,无人机遥感具有提取精度高、数据获取灵活方便、成本较低等优势,对于小范围内的高精度绿地信息提取具有十分大的发展潜力。本文基于高分辨率无人机影像,通过多尺度分割,构建3种不同的可见光植被指数,选取合适阈值建立光谱规则,提取得到北川县城市绿地分布概况结果,并通过对比分析,得出以下结论:
(1)基于高分辨率无人机影像的面向对象分类技术适用于城市绿地提取统计。本文所采用的3种植被指数均能较好地区分植被与非植被信息,其中基于VDVI的分割精度要高于NGRDI与NGBDI,提取总体精度达到89.5%,证明无人机遥感在城市绿地信息获取方面的可行性。
(2)依据植被指数提取结果,通过分类后处理校正,最终统计得到北川县城建成区绿化覆盖度为40.04%。对比2017年四川省统计年鉴所公布的数据中,北川县建成区绿化覆盖度为44%,分类结果比该值略低,经过分析是由于季节差异,自然环境变化,统计方式等带来的误差,属于可控范围。
本文还存在以下不足:
(1)本文所采用的方法优势在于能够有效提取狭小绿地,如行道树、花坛等,但也造成部分绿地图斑破碎,封闭绿地中存在细小的洞、斑点现象。
(2)本文仅通过构建可见光植被指数的方法进行绿地提取,因此仅考虑到影像的光谱特征,而对于部分富营养化的水体以及近似植被光谱特征的非植被区域区分效果较差,部分植被覆盖度较低或颜色特殊的绿地被遗漏,自动提取结果存在错分、漏分现象。
(3)由于影像分辨率高,数据量大,导致计算机处理速度较慢,且目前无人机在续航能力方面的技术还不成熟,因此该方法暂不适用于空间尺度太大的区域。
猜你喜欢
北京园林(2021年2期)2022-01-19 02:17:34
北京园林(2020年1期)2020-01-18 05:19:30
水土保持研究(2018年5期)2018-10-12 05:29:52
中国农业信息(2018年2期)2018-07-28 08:02:10
现代园艺(2018年1期)2018-03-15 07:56:40
现代园艺(2017年19期)2018-01-19 02:50:28
现代园艺(2017年23期)2018-01-18 06:58:23
现代园艺(2017年21期)2018-01-03 06:42:03
风景园林(2017年5期)2017-10-14 01:03:41
岁月(2017年9期)2017-09-08 14:45:50