基于激光雷达技术的桥梁防撞预警系统的研究
2019-07-05 00:41刘春雷赵德英
兵器装备工程学报 2019年6期
刘春雷,陈 杰,赵 莉,赵德英
(重庆工业自动化仪表研究所, 重庆 401121)
目前国内外桥梁防撞技术主要分为两大类:第一类是被动防撞模式,采用各种柔性耗能装置,安装在桥梁外侧,当发生撞击,减轻撞击产生的作用力,降低损失;第二类是主动防撞模式,在桥区周围安装各种传感器或摄像头等电子设备,建立防撞预警系统,通过监视过往船舶,进行航线预判,实现引导船舶航行,减少或避免撞击事故的发生。由此可见采用主动防撞模式,通过预先防范,可最大程度保障桥梁安全。此次介绍桥梁防撞预警系统采用主动防撞模式,通过运用激光雷达作为检测工具,ASI、喇叭、灯光作为预警手段,再结合互联网技术、计算机技术等实现过对往船舶监视、对可能发生撞击桥梁的船舶进行预警。
为了实现桥梁防撞预警检测目的,国内外开展了大量研究,并得出了各种不同的解决办法。综合归纳,主要有以下3种方式:视频监控系统方式、AIS监控方式、红外线测距方式。
1) 视频监控系统方式。视频摄像头被安装在桥梁指定位置,通过全天候拍摄。对拍摄视频文件采用数字图像算法进行数据处理、分析,能自动检测、识别在复杂环境中的船舶影像。但视频监控技术对光照条件依赖严重,白天光照良好情况下视频监控效果显著,而黑夜或大雾情况下拍摄效果会受到严重影响。因此当外部环境不理想的情况下目标的获取和判别需要人工辅助完成。
2) AIS监控方式。AIS(船舶自动识别系统)是现代船舶的标准设备,具有船只识别、目标追踪、提供辅助信息避免碰撞事故发生等功能。AIS通过全球定位系统(GPS)将船舶实际位置、船速、航向等船舶动态数据,结合船名、呼号、船舶尺寸及运输货物等船舶静态数据同时向附近水域其他船舶和岸台广播,从而实现船船之间,船与岸之间能及时进行信息交流。使用AIS监控方式,其区别于视频监控等手段的最大优点是通过与船舶互动方式得到船舶完整信息,无需通过影像文件提取,减少了测量误差。使检测船舶更简便,快捷,准确。但该方式的主要缺点在于:通过桥梁的船舶是否都能安装AIS,且AIS是否能正常工作。
3) 红外线测距方式。将红外线测距传感器安装在桥梁特定位置,通过控制发光元件发出信号(通常为红外线)射向目标物体,经物体反射后传回系统的接收端,再将接收信号通过光电转换器,计算出目标物体的距离。使用红外线测距具有测量距离远、范围广、响应时间快等优点,能迅速检测航道内过往船舶。但在实际运用中,红外线测距虽然能检测到航道内船舶,但不能分辨被测船舶类型、大小,在这种情况下,不能采取准确的报警方式进行预警。
1 桥梁防撞预警系统介绍
桥梁防撞预警系统组成由现场数据采集子系统、数据处理控制中心、预警子系统三个部分组成。各子系统之间通过无线网络技术进行数据传输,系统框架图如图1。
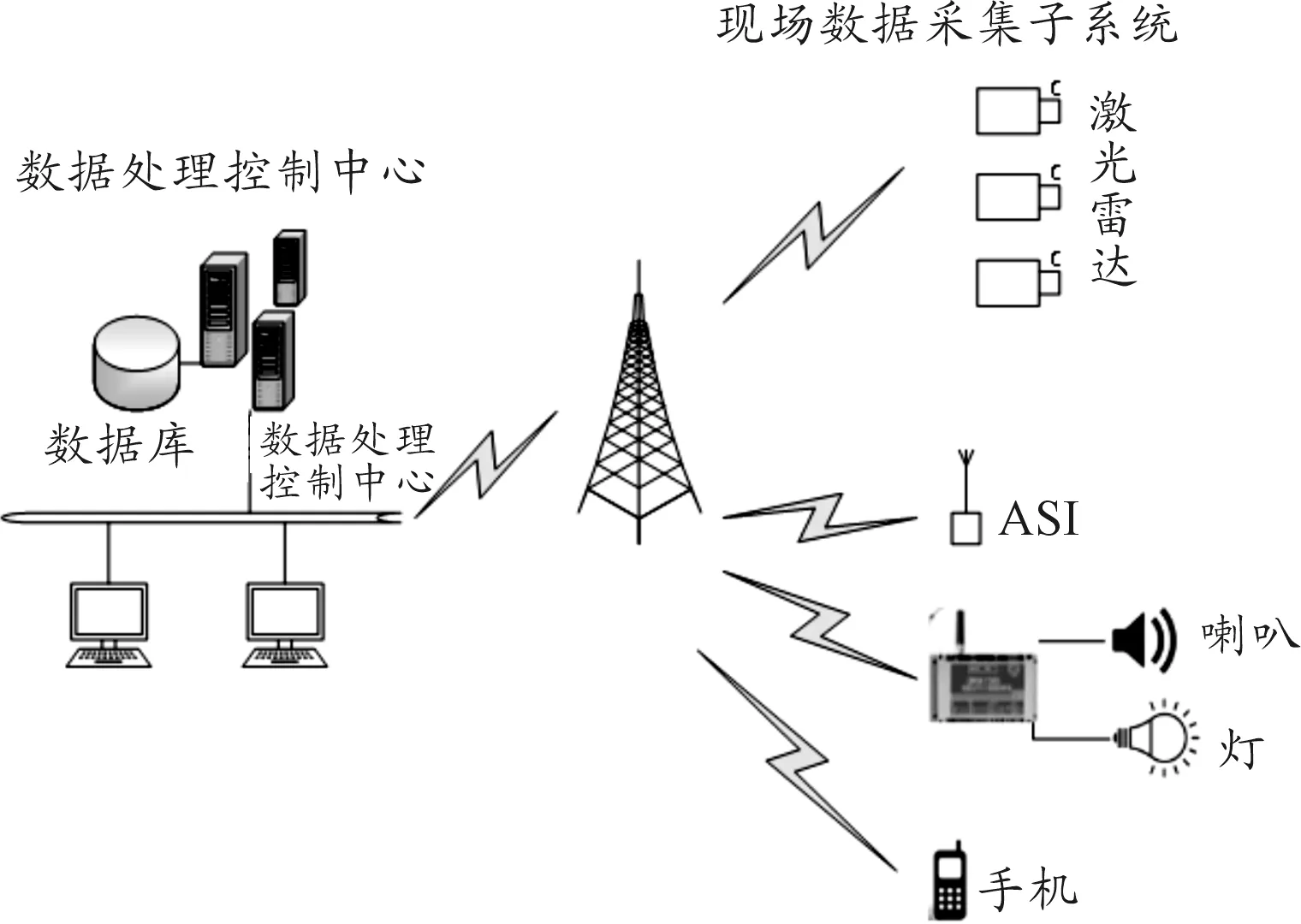
图1 系统框架图
现场数据采集子系统,主要由场外激光雷达组成,安装在桥梁特定位置和高度,安装位置如图2,利用激光对通航水域内危险目标进行扫描,在一定距离内发现水面上航线的船舶,并测量船舶的方位、距离、高度,通过无线网络传输至数据处理控制中心。
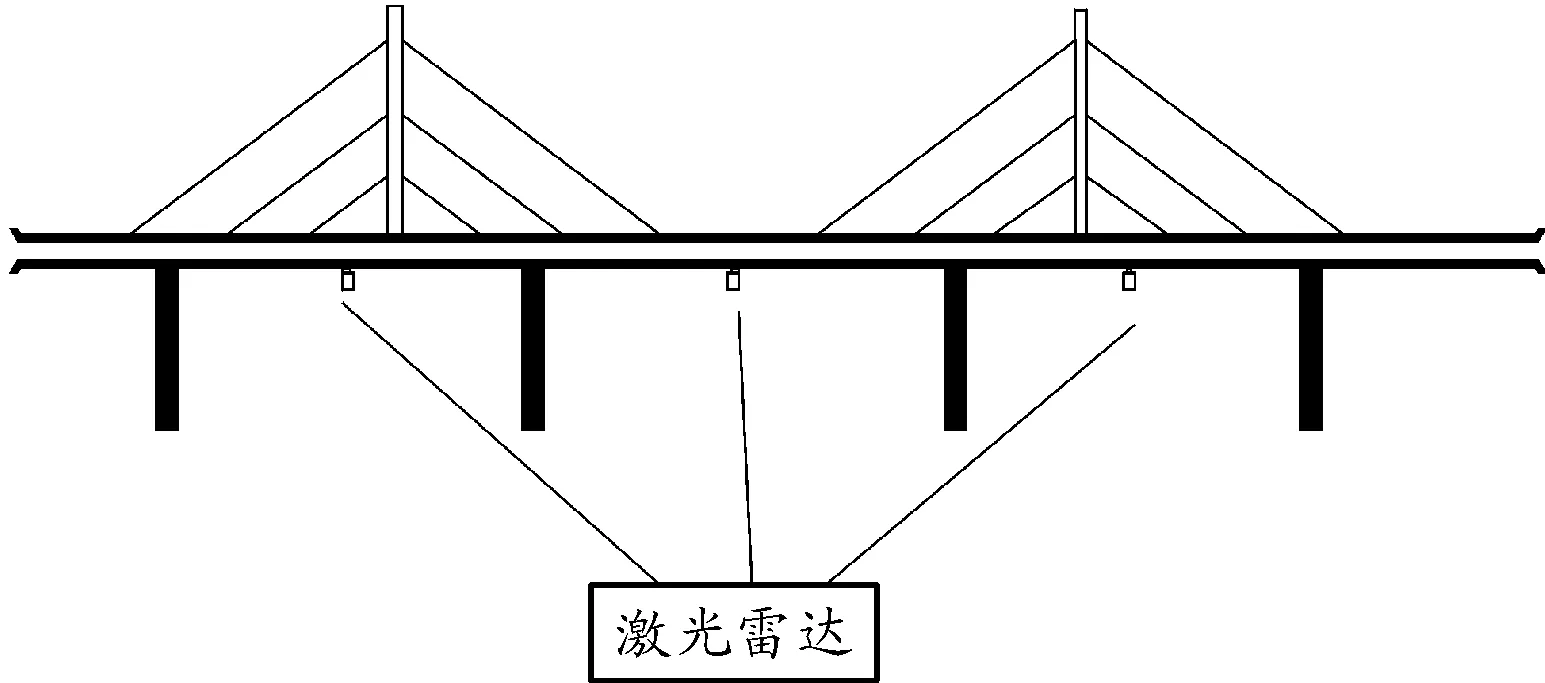
图2 安装位置
数据处理控制中心,通过无线网络接收场外激光雷达采集数据,对数据计算分析,判断即将通行船舶是否能安全通过桥梁。一旦分析结果表明可能发生撞击,立即向预警子系统发送命令进行预警。
预警子系统,由喇叭、ASI、灯光、人工预警四部分组成,当接收到数据处理控制中心传递的报警信号,根据当时现场环境,采取适当报警措施进行报警。
2 桥梁防撞预警系统关键技术研究与原理
2.1 激光雷达工作原理、特点
激光雷达将激光作为探测手段。其工作原理是通过激光发射与接收返回信号进行对比得到结果。在激光雷达内由许多个组件,每组都包含发射单元和接收单元。如图3所示。
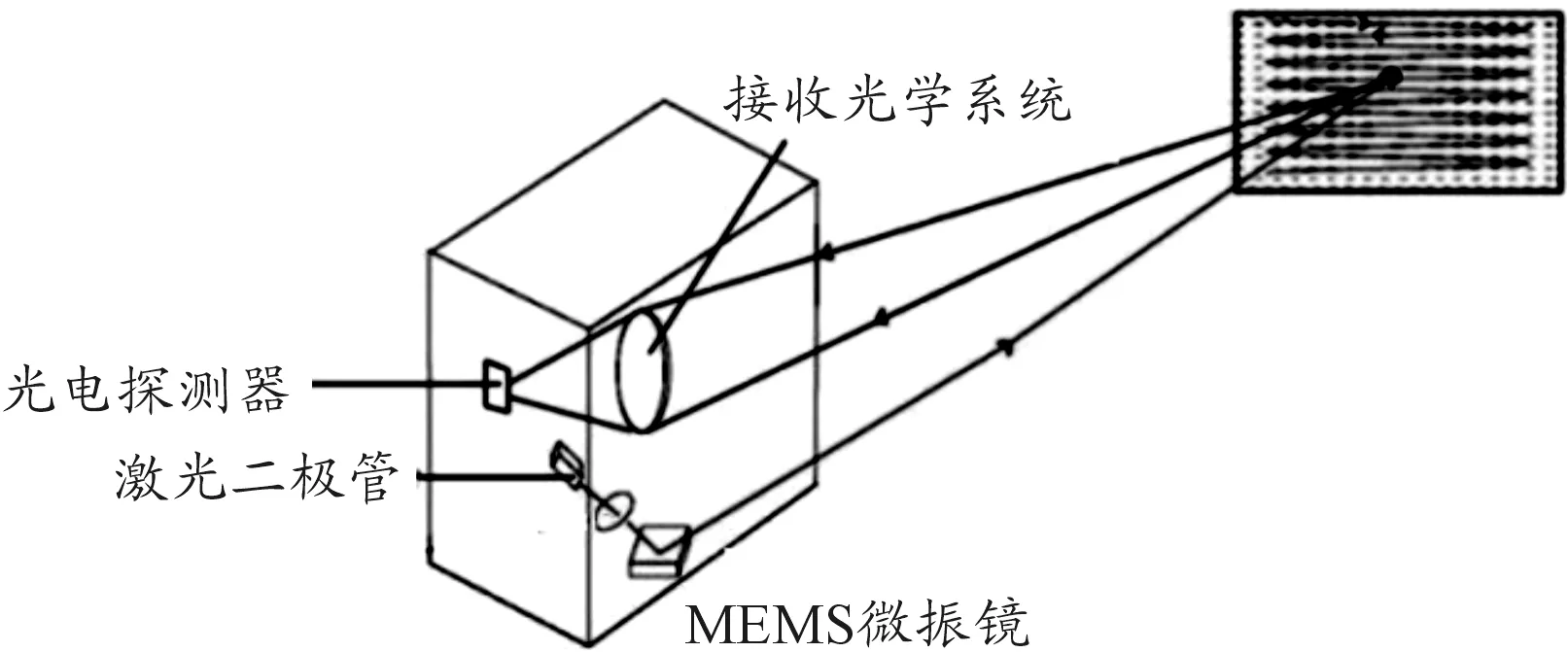
图3 激光雷达工作原理图
发射单元通过激光二极管发出探测信号(激光束),当激光束照射到被测物体后返射回来,接收单元收到返回信号,后根据发射信号和接收信号的时间差,计算被测物体与激光雷达距离。当大量组件采集到的反射信号后,便能形成点云。分析点云,找到需要检查的目标,最终可以绘制出被测目标轮廓。通过不间断的检测。根据点云绘制的目标的变化,可以判断被测目标物体的大小、距离甚至运行速度。激光雷达与其他检测设备相比具有以下几方面的优势:(1)高分辨率。激光雷达可以通过内部许多个发射接收激光组件形成点云。组件越多,点云密度越高,形成的图像就越清晰。得到被测目标数据分辨率越高。(2)获取信息量丰富。通过点云,可同时跟踪多个被测目标。(3)对外界环境依赖小。即使在夜晚,激光雷达也能正常工作。因此桥梁防撞预警系统采用激光雷达进行水面船舶检测。
2.2 船只特征辨识过程研究
由于激光雷达采集的点云数据为离散数据,没有标注任何被测物体特征和形态,只包含每个点的三维坐标和其他附加信息。因此必须将点云数据进行计算分析,再提取被测物特征进行对比。主要由以下几个步骤实现。其框图如图4所示。
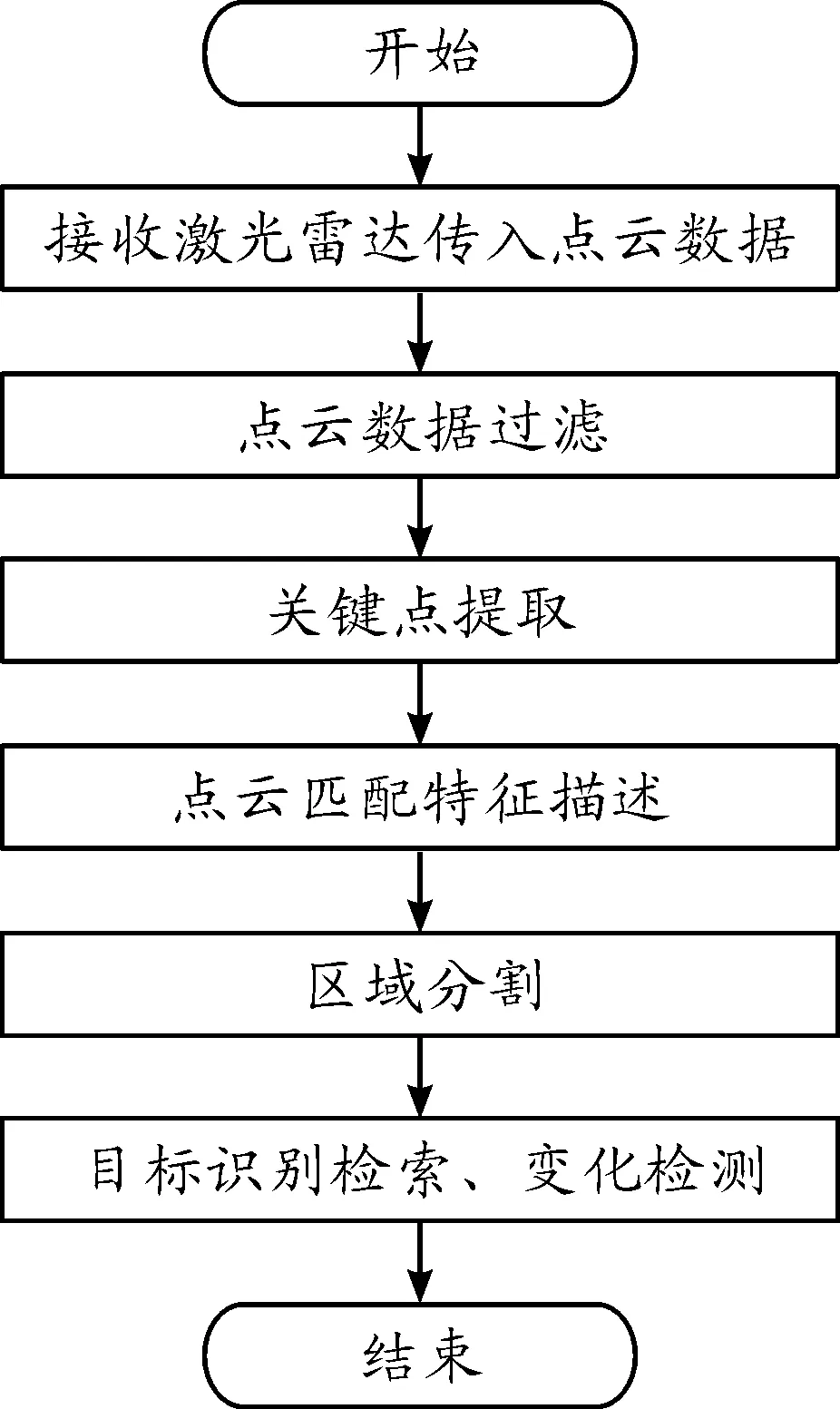
图4 船只特征辨识过程框图
在实际检测中,环境因素带来的影响和数据拼接配准操作过程,会使采集到的点云数据中存在一些不可避免的噪声。数据处理控制中心收到激光雷达采集数据后,首先将点云数据采用双边滤波方式进行滤波,避免对后续计算分析结果的干扰。
激光雷达采集点云数据包含大场景下各种目标,它们相互混杂,既然要对水面目标进行识别,就需要有一个区分被测目标的指标来最大化不同目标之前的区别。所以采用SIFT算法来提取关键点。
点云匹配与特征描述,要对一个三维点云进行描述,除了点云位置信息是不够的,还需要计算一些辅助数据,比如法线方向、曲率等等。利用点云的曲率不变性,通过k邻域法以及最小二乘法拟合两点云的每一点的所在曲面,然后算出其法向量,进一步求取该点的曲率,然后通过曲率以及其他的一些手段,进一步将两点云分别简化为特征点云。点云匹配采用ICP(迭代最近点)算法用于两堆点云之间进行配准。把ICP方法看做一个点云位姿变换的过程,可以使用代数方法和非线性优化方法。
假设有两堆点云X(X1,X2,X3,X4,X5,…,Xm),Y(Y1,Y2,Y3,Y4,Y5,…,Yn)分别记为两个集合。其ICP公式为:
(1)
式(1)中,R,t两参数分别表示旋转变换和平移变换。
区域分割阶段主要完成特征模式的分类及识别确定,即确定特征属于哪类模式,如直线、圆弧等,并确定属于该特征模式的区域及区域内的激光数据点集。将点云分割成不同的区块,如果连续两个点云数据的距离小于一个阈值,这两个扫描点属于同一个区块。如果连续两个扫描点的距离大于一个阈值,点云数据帧就从这个地方分割开。
船舶识别检索与变化检测目的是识别点云中需要检测的船舶,并根据采集到的被测船舶不同角度的点云数据,进行比对分类。识别检索功能采用Hausdorff距离计算方法。Hausdorff(豪斯多夫距离)是衡量两组点云之间相似度的一种方式。它是两个点云之间距离的一种定义形式。虽然通过分析得到可靠的结果,但在实际情况下由于部分船舶轮廓可能会发生目标遮挡的情况,导致计算结果无法与真实船舶轮廓相匹配从而无法准确分析船舶数据。因此,需要对部分检测结果进行变化检测。结合形态学的相关理论,对因遮挡而未识别到的船舶进行重构,这样能大大减少测量的误差。通过计算分析,将采集数据成像如图5所示。
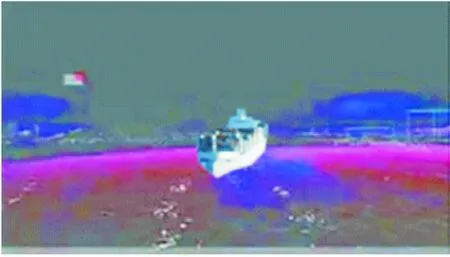
图5 数据采集成像图
2.3 船舶运行轨迹计算
运行轨迹计算,采用ZooTarcer软件进行描绘,ZooTarcer能识别并追踪视频中物体运动轨迹。将每次采样数据描绘图像并保存。通过一段时间连续采样。将多组成像按时间先后顺序组合成视频文件。当被测物移动至桥墩安全区域内时,通过ZooTarcer对视屏文件中移动物体体积、角度、运行速度等进行计算,得出是否会发生撞击事故,描绘出被测物的运行轨迹(见图6)。
根据判断结果,如发现被测物不能安全通过,则将被测物相关数据通知预警子系统进行预警。
图6 船舶运行轨迹
2.4 预警控制研究
预警子系统由ASI、喇叭、灯光组成。ASI是船舶自动识别系统,使用ASI接口,可以向指定船舶发送信息。喇叭与灯光由PLC控制。预警子系统通过无线网络接收到数据处理控制中心报警信息,根据信息中被测物类型选择预警方式。如判断结果为船舶可能发生撞击桥梁,将控制PLC启动喇叭,若为夜晚还需开启灯光对即将通过的船舶进行警告。同时通过ASI搜索附近船只,发送预警信息。如被测物不为船舶,根据收到数据处理控制中心报警信息并评估其撞击桥梁力度,得到结果后再决定是否通过4G网络通知相关工作人员。
3 结论
基于激光雷达技术的桥梁防撞预警系统。能够克服现有的桥梁被动防撞的局限性,能实现全天候、稳定、可靠地测量船只通行安全。自动对有潜在威胁的船舶进行预警提示可极大地提高桥梁整体安全及航道航行安全,为桥梁主动防御提供参考模式,对实际运用具有重要实际意义。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
现代临床医学(2021年3期)2021-07-16
汽车实用技术(2021年9期)2021-05-26
民用飞机设计与研究(2020年4期)2021-01-21
电子制作(2019年11期)2019-07-04
汽车工程师(2018年1期)2018-07-13
汽车电器(2017年1期)2017-12-06
东方教育(2017年17期)2017-10-31