星载激光雷达高精高稳探测卫星系统保证技术
2019-07-05 02:38袁金如汪自军董长哲刘继桥石新宇
上海航天 2019年3期
袁金如,汪自军,董长哲,刘继桥,石新宇
(1. 上海卫星工程研究所,上海 201109; 2. 上海光学精密机械研究所,上海 201800)
0 引言
激光雷达遥感卫星具备主动发射能量集中、波长短观测精细,以及无光照限制全天时连续工作,可探测大气成分垂直廓线等特点。1994年,美国国家航空航天局(NASA)兰利研究中心首次进行星载激光雷达空间技术试验(LITE)[1],验证了星载激光雷达系统对全球气溶胶探测的可行性,自此星载激光雷达基础研究和应用研究蓬勃发展。2003年,随着ICESat卫星发射入轨,其装载的地球激光测高系统(GLAS)开始工作,主要应用于全球的冰层地形及气溶胶和云的垂直分布探测[2],是世界上第1个实现对全球大气及地表进行连续探测的星载激光雷达系统。2006年,美国CALIPSO卫星发射成功,其装载的双波长正交偏振云-气溶胶激光雷达CALIOP成为迄今为止工作寿命最长的星载激光雷达[3]。2018年,欧洲太空局ADM-Aeolus/ALADIN测风激光雷达卫星发射成功,是全球首颗用于观测地球风场的专用卫星,其采集的风廓线数据有望显著提高气象的预报准确度[4]。法国与德国合作的“灰背隼”(MERLIN)卫星利用积分路径差分吸收激光雷达探测甲烷柱状浓度,以用于全球碳循环及温室气体效应研究,计划于2021年发射[5]。关于全球温室气体CO2柱线浓度测量项目主要还有欧洲太空局ASCOPE[6]和美国ASCENDS[7],但均处于研究论证阶段,暂未有研制计划。在我国,大气环境监测卫星是国家民用空间基础设施规划中的科研卫星,是我国大气环境监测领域的重要组成部分。卫星装载了大气探测激光雷达(ACDL)、高精度偏振扫描仪等有效载荷,通过主、被动手段结合实现对大气细颗粒物、污染气体、温室气体、云和气溶胶等大气环境要素进行大范围、连续、动态、全天时的综合监测[8]。作为主要载荷,ACDL采用双体制3波长激光雷达同步探测全球气溶胶垂直廓线信息、CO2柱线浓度等重要大气环境要素。气溶胶探测综合采用532,1 064 nm双波长后向散射、高光谱分辨和偏振接收方法。CO2柱线浓度测量采用双脉冲1 572 nm激光积分路径差分吸收方法。ACDL的高精度探测对整星机热保障、高精度指向保证等提出了很高的要求。
本文针对大气激光遥感卫星CO2柱线浓度遥感探测,开展了星载激光雷达测量系统指标体系梳理、探测精度影响敏感参数和功能模块配置及保障要求分析等工作,重点从星载激光雷达光机头部稳定安装、良好机热环境及发射光轴绝对指向高精度测量等整星层面进行总体设计系统保证;同时就激光雷达波长、能量精度及稳定性实时监测、卫星对地光轴指向高精度测定和星地载荷光轴指向测量误差标定提出地面试验验证要求。大气激光遥感卫星在轨飞行示意图如图1所示。
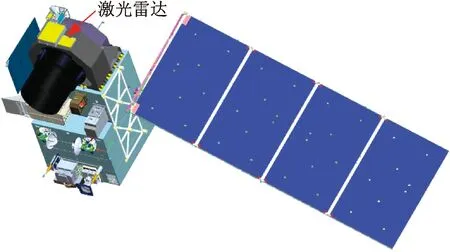
图1 大气激光遥感卫星在轨飞行示意图Fig.1 Schematic diagram of atmospheric laserremote sensing satellite on orbit
1 探测原理及测量系统指标体系框架
1.1 CO2柱线浓度测量原理
卫星利用激光雷达积分路径差分吸收体制测量CO2柱线浓度[7]。当卫星经过某探测点时,分别发射波长为λon和λoff的2束激光照射地面,其中λon波长与CO2气体分子中心谱线(带)重合,该光束在大气介质中传输时,受到CO2气体分子的强烈吸收而衰减,根据激光被吸收的程度可确定大气中CO2气体分子的浓度。同时为了减小大气中其他气体分子、气溶胶造成的衰减,以及仪器参数等对探测精度的影响,选取另一波长λoff对其进行校正,该波长处于CO2吸收谱线的谷值且略偏离λon,2束激光(双脉冲)沿同一大气路径发射并传输,原理如图2所示。
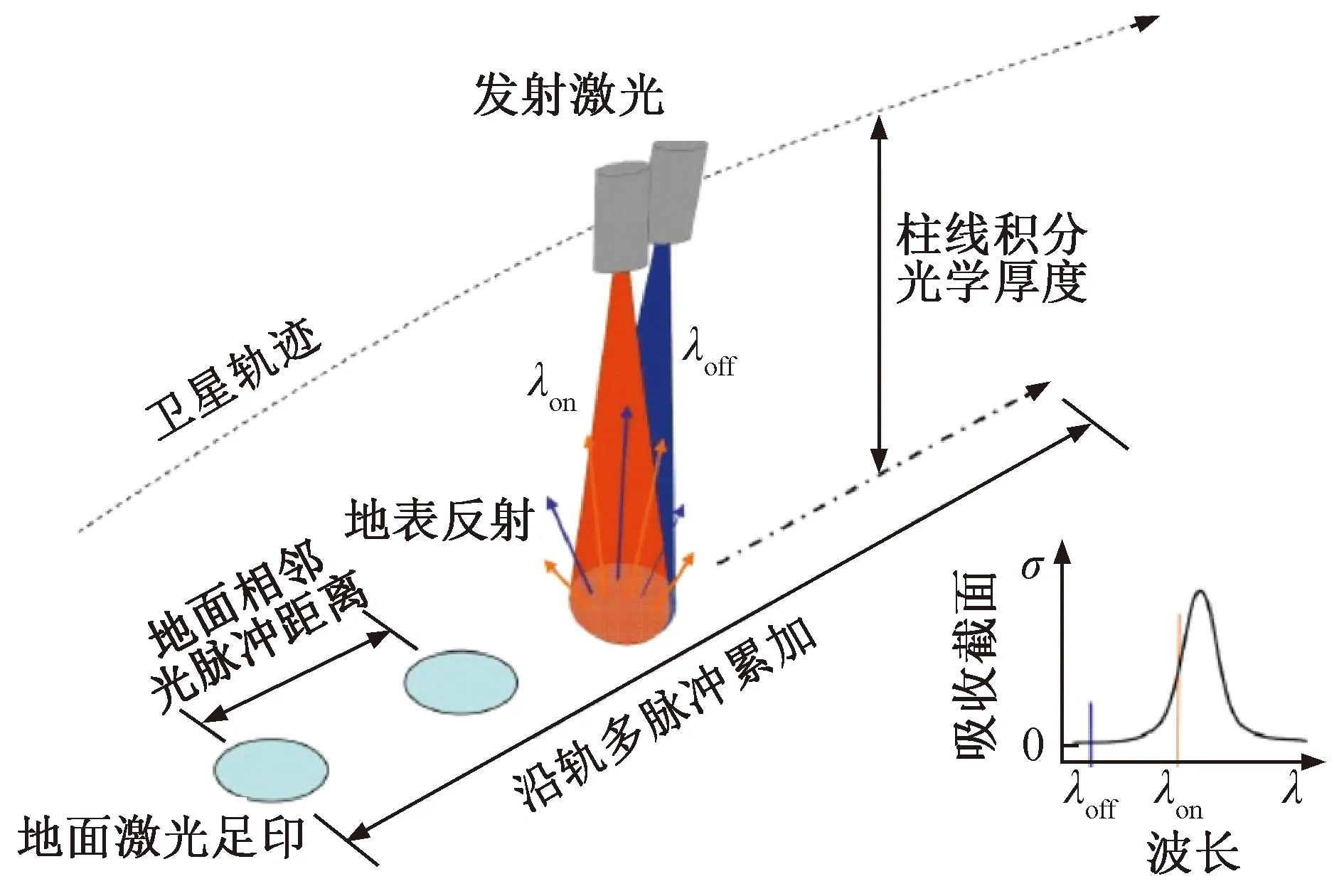
图2 积分路径差分吸收星载激光雷达探测CO2浓度原理Fig.2 Schematic diagram of detecting concentration of CO2 using integration path differential absorption space-borne lidar
由于2束激光被CO2吸收的能量不同,卫星接收到的两激光束反射回波能量就有区别。结合大气温度、压强、水汽混合比等环境参数及卫星指向测量不确定性等卫星轨道姿态参数,根据接收的回波信号差别计算得到CO2柱线浓度。
1.2 星载激光雷达测量系统指标体系框架
根据应用指标要求,CO2柱线浓度测量精度为1×10-6/50 km(陆地)。影响积分路径差分吸收激光雷达测量全球CO2柱线浓度的误差主要包括载荷参数误差、平台参数误差及大气环境参数误差[9],体系框架如图3所示。
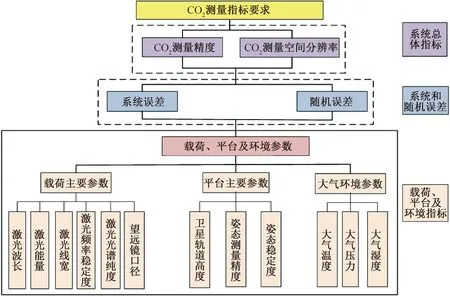
图3 CO2激光雷达测量系统指标体系框架Fig.3 Index system of space-borne lidar on CO2 measurement
2 探测精度敏感参数指标要求及激光雷达功能模块配置
2.1 探测精度影响参数指标要求
本文仅考虑激光雷达自身系统误差及卫星姿态指向精度影响,并着重考虑需要卫星进行保证的参数,而不考虑激光雷达探测随机误差及大气压力、温度和湿度等环境引入误差影响。
2.1.1 激光雷达系统参数指标
CO2柱线浓度的测量与发射光信号功率、接收光信号功率大小密切相关。激光波长、能量、线宽、频率稳定性、光谱纯度等不确定性因素都会带来CO2浓度测量误差,主要误差项见表1。
2.1.2 卫星姿态参数指标
卫星指向不准确会导致沿轨、穿轨多普勒效应。on-line和off-line足印不重合、激光路径长度不确定等均会引起全球CO2柱线浓度测量误差。综合分析,对卫星姿态精度指标要求见表2。

表1 激光雷达系统主要参数指标要求
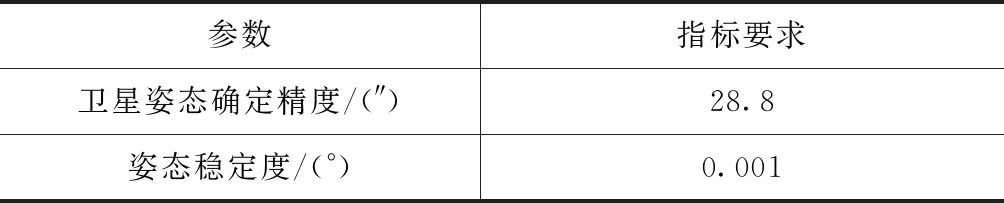
表2 卫星姿态精度指标要求
其中,卫星姿态确定精度是指从激光雷达发射光轴到星敏光轴的指向测量精度,主要受星敏自身测量误差、星敏支架变形误差及激光雷达内部光路传输误差等影响。
2.2 激光雷达功能模块配置
星载激光雷达主要通过具有高稳定、高精度波长及能量要求的激光发射及高灵敏度回波接收,实现卫星对PM2.5等细颗粒物及CO2柱线浓度的高精度遥感探测。根据激光雷达系统一般组成原理[10],大气遥感卫星激光雷达包含激光发射、回波接收及服务保障三大模块。其中:激光发射模块主要由发射望远镜、功率激光器和参考激光器等部分组成;回波接收模块主要由接收望远镜、后端光路和数据采集等部分组成;服务模块主要由安装结构、能源供应、温度控制、内部通信、遥测遥控等部分组成。激光雷达主要功能模块配置如图4所示。
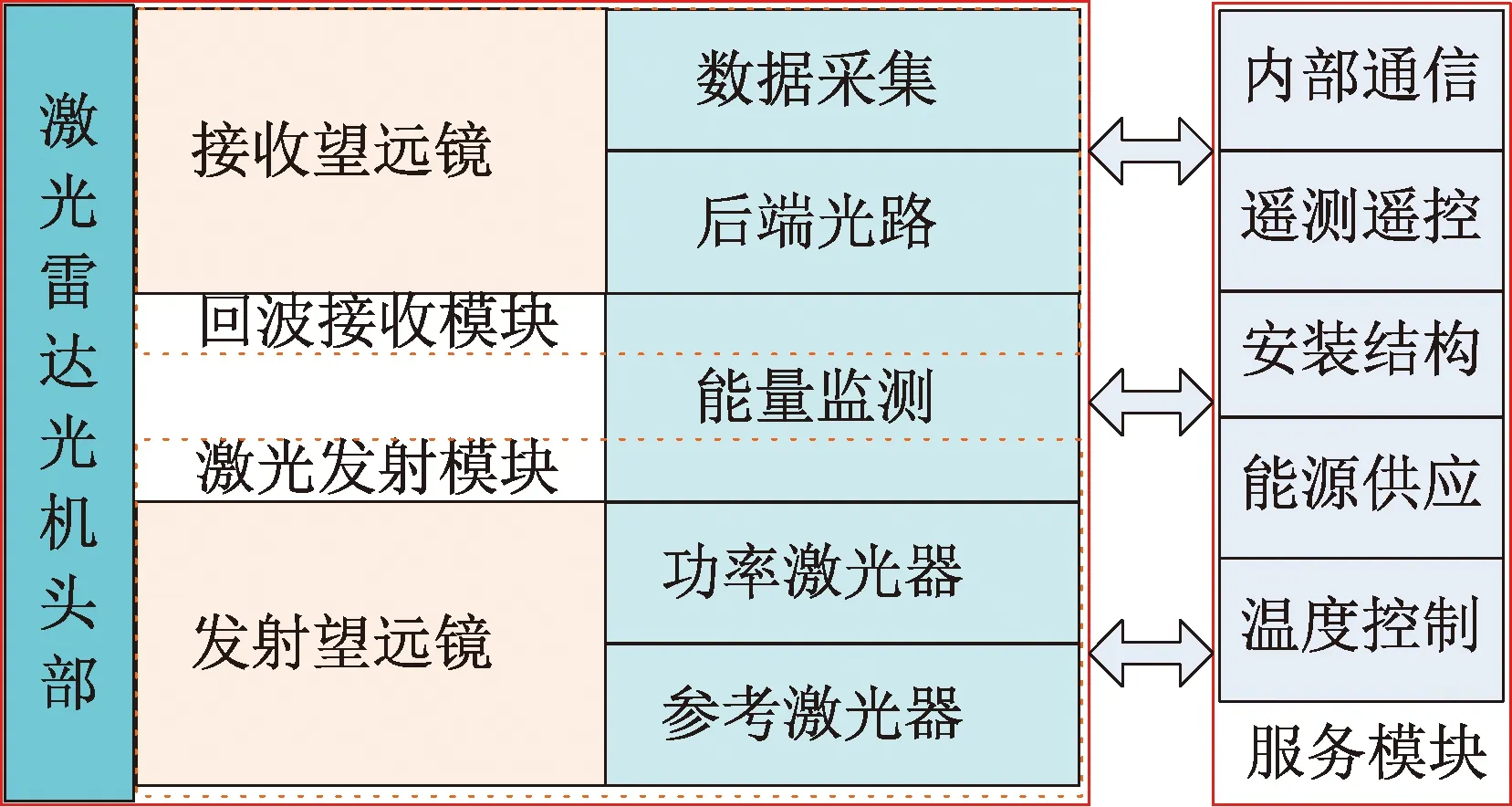
图4 激光雷达主要功能模块配置Fig.4 Main functional module configuration of space-borne lidar
激光雷达功能模块配置中,直接影响卫星遥感探测精度的有发射望远镜、功率激光器、参考激光器、接收望远镜、后端光路、能量监测等功能模块,这些关键模块一般集成于激光雷达光机头部。其中,激光发射能量、波长、线宽、光谱纯度指标主要取决于功率激光器、参考激光器性能,滤波器带宽指标主要取决于后端光路模块性能。发射及接收功率测量精度主要取决于能量监测模块性能。工作环境条件尤其是力学环境及温控水平对激光雷达以上性能参数影响很大。力热引起的变形,轻则导致光束质量变坏,重则引起元器件内缺陷、表面灰尘污染,将导致光学系统失效[11]。因此,需要卫星提供稳定的安装结构及良好的热控环境保障。
3 激光雷达高精度探测保证措施
从总体设计系统保证、地面试验专项验证和星地载荷光轴指向测量误差标定三大层面,提出激光雷达在光机头部稳定安装条件、良好机热环境及发射光轴绝对指向高精度测量技术的保证措施。
3.1 总体设计系统保证
3.1.1 合理构型
大气激光综合遥感卫星整星采用中心承力筒+蜂窝板封闭式舱体构型,大体积激光雷达光机头部通过其箱体式整体框架水平安装在卫星载荷舱顶板上。整星主传力路径为激光雷达光机头部→载荷舱隔板→中心承力筒→星箭连接环,路径简洁,传力高效。卫星总体构型如图5所示。
根据卫星结构构型特点,在推进舱底板、服务舱底板、载荷舱底板、载荷舱中板、载荷舱顶板相应处设置振动监测点(见图5),分别监测主传力路径及激光雷达光机头部安装面结构动力学放大特性,具体频响特性情况如图6所示。
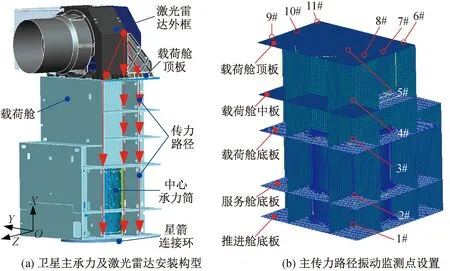
图5 大气激光遥感卫星总体结构构型Fig.5 Structural configuration of atmospheric laser remote sensing satellite

图6 卫星主传力路径及激光雷达安装面频率响应情况Fig.6 Frequency response of main load trans-pathof satellite and mounting surface of lidar
卫星主传力结构动力学放大传递随卫星结构高度的增加而增大,曲线顺滑无突变,卫星主结构刚度特性较好;激光雷达安装面响应放大控制在8倍以内,安装条件满足相关要求。
3.1.2 统筹布局
激光雷达光机头部整体外框采用碳纤维材料,热传导系数低,同时在卫星载荷舱顶板连接处采用钛合金镶块加强,阻止其与卫星平台之间的热传导耦合,以便实施独立热控。为防止海洋镜面反射造成探测器损伤,激光雷达光机头部沿卫星X轴整体偏转2°安装,且遮光罩偏向背阳面(+Y)一侧,保证探测器接收能量安全,同时降低了太阳光照射遮光罩内侧面积,提升热控效率并减少杂散光影响。散热板热控组件分布安装在整体外框背阳面(+Y)一侧,不直接与基准板等高精度要求光学组件相连,既提供了高效散热面,又不影响关键部位精度。
高精度大功率激光器通过多级力、热隔离,实现高精度、高稳定机热环境工作条件。激光雷达光机头部通过钛合金箱盒式垫片与卫星平台隔热安装,高精度高导热要求基准板通过钛合金柔性安装脚安装在激光雷达整体外框承载龙门架上,功率激光器则通过精确刚度/阻尼设计的钛合金减振安装脚固定在基准板上。另外,大功耗功率激光器热量通过异型外贴热管传导至散热板辐射散出,异型热管可高效导热,亦可部分吸收安装及热变形应力。星载激光雷达光机头部总体布局如图7所示。
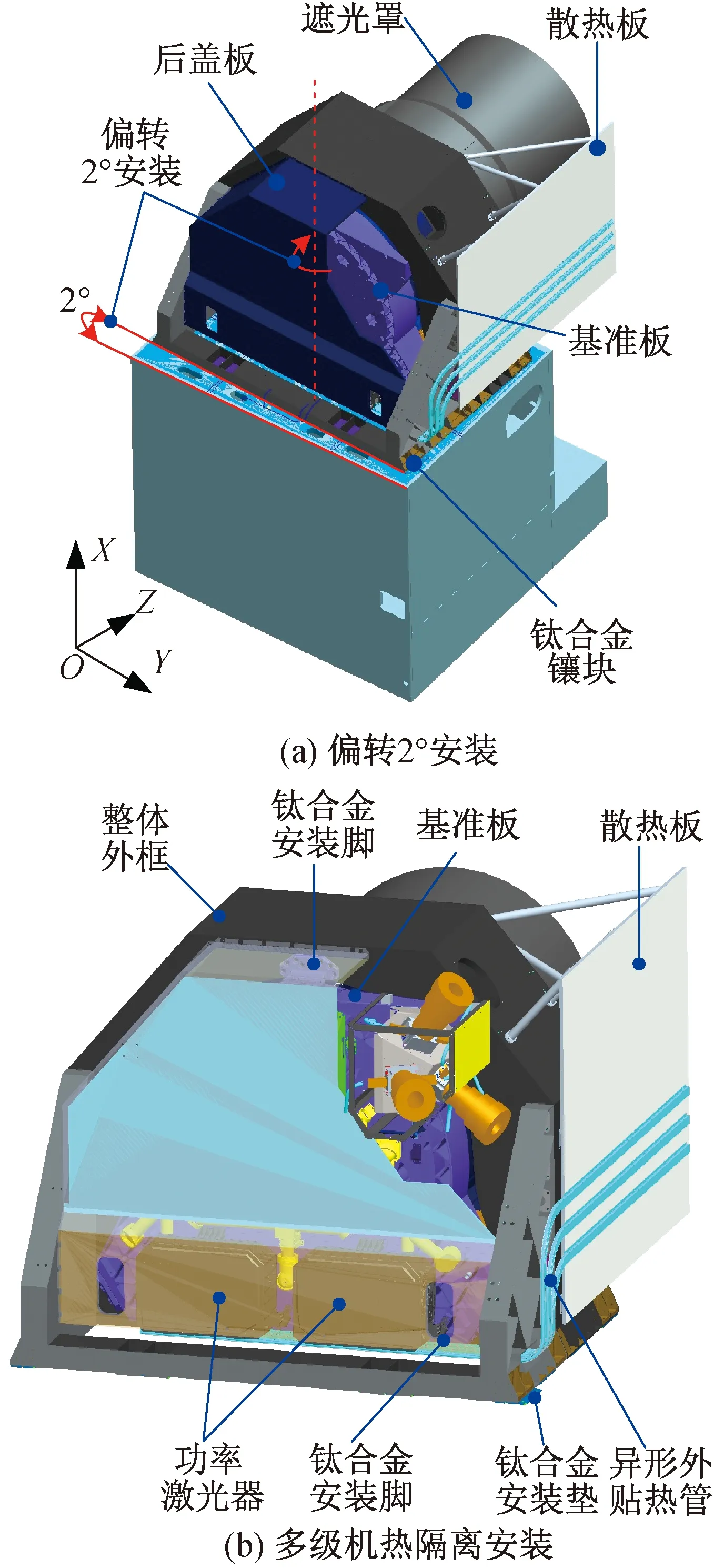
图7 星载激光雷达总体布局Fig.7 System layout for space-borne lidar
激光雷达发射光轴到星敏光轴的绝对指向高精度测量,对多头星敏与激光雷达之间的连接件,即星敏支架热变形提出了很高的要求。为保证星敏支架稳定热环境,根据太阳同步轨道光照特点,在其外围增加了封闭式热控罩,然后再对星敏支架实施精密温控,星敏热量直接通过散热板辐射散出。星敏支架安装布局及典型工况下温度分布如图8所示。
星敏支架温度处于19~21 ℃,满足环境温度水平要求。其中星敏安装面温度处于19.5 ~20.1 ℃,变化平滑,波动为-0.3~0.3 ℃,满足热变形控制所需的局部温度波动要求。
3.1.3 星敏载荷一体化

图8 星敏支架安装布局及其温度分布Fig.8 Layout and temperature distribution for mounting bracket of star sensors
为补偿卫星指向不确定导致的卫星沿轨多普勒频移效应,需保证激光雷达发射光轴到星敏光轴的绝对指向测量精度,该指向测量精度主要受星敏自身测量误差、星敏支架变形误差及激光雷达内部光路传输误差等影响。为减少传输环节,将星敏支架与激光雷达基准板一体安装,且两者均采用铝基碳化硅材料,保证热变形的一致性。星敏与激光雷达光机头部一体化安装设计如图9所示。
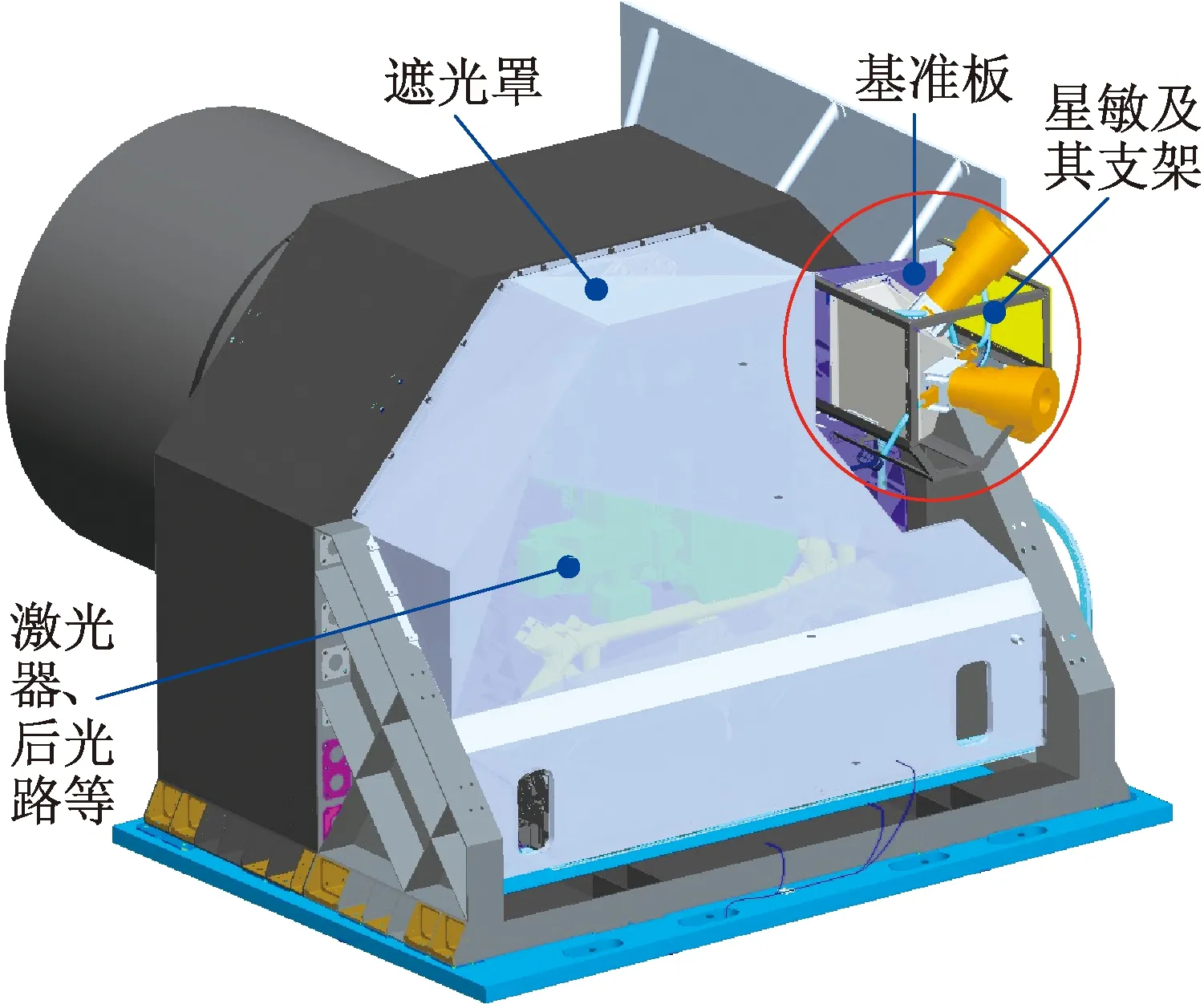
图9 星敏与激光雷达一体化安装布局设计Fig.9 Integrated layout design of starsensors and space-borne lidar
为定量测量激光雷达内部光路传输情况,设置光轴监视单元,测量其发射光轴到星敏支架之间的安装及变形误差。并将光轴监视单元的激光合束棱镜与星敏支架精测棱镜合二为一,实现星敏安装、测量及变形监测三基准统一,进一步减少误差环节,如图10所示。
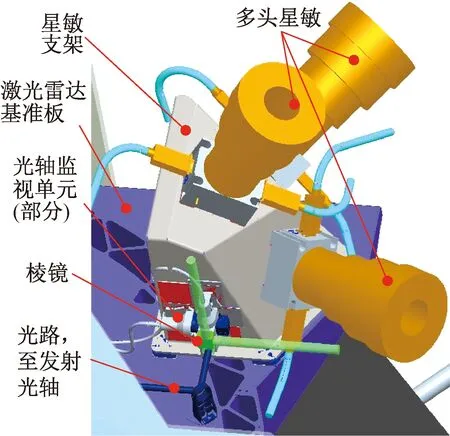
图10 星敏安装、测量及变形监测统一基准Fig.10 Installation, measurement and deformationmonitoring reference of star sensors
通过上述星敏与激光雷达一体化布局和安装、测量及变形监测三基准统一,光轴变形监视等设计措施,激光雷达对地光轴指向测量确定精度可优于28″,满足基于沿轨多普勒频移约束的卫星指向不确定性控制要求。
3.2 地面试验验证要求
3.2.1 整星条件下激光雷达波长、能量精度及稳定性实时监测
星载激光雷达为主动式探测系统,激光波长及发射能量的精度和稳定性直接影响CO2反演探测精度。根据系统参数指标要求,1 572 nm波长相对测量误差需控制在0.6 MHz,单脉冲能量监测相对误差需控制在5%,并在星上激光雷达系统中设置了相应的波长频率及能量监视系统。为验证激光雷达在装星、测试及试验过程中发射激光的性能及监测系统的监测精度和稳定性,需在地面建立整星条件下激光雷达波长、能量精度及稳定性实时监测系统,对激光雷达发射激光的能量和波长进行监测,并与星上监测系统进行比对。地面实时监测系统波长检测精度优于0.3 MHz,能量检测精度优于2%。
3.2.2 卫星对地光轴指向高精度测定
激光雷达收发光轴匹配精度及卫星对地光轴指向测量精度是保证全球CO2柱线浓度反演精度的关键性指标。激光雷达收发光轴匹配是指在轨期间收发光轴处于同轴状态,即发射激光和接收望远镜光学系统光轴时刻保持平行。受空间环境温度变化等影响,激光雷达发射光轴和接收光轴会产生偏差,需要在轨进行收发光轴的匹配调节。卫星对地光轴高精度指向测量是用于补偿激光雷达发射光轴指向不精确导致的沿轨多普勒频移效应引起的CO2探测误差。根据任务分析,要求激光雷达发射光轴和接收光轴匹配精度控制在30 μrad以内,卫星对地光轴指向测量精度控制在140 μrad以内,并在星上设置光轴监视系统进行实时检测。为验证激光雷达装星测试过程及力热试验前后收发光轴匹配性,以及卫星对地光轴指向测量精度和稳定性,需在地面建立卫星对地光轴指向高精度测定系统,对相关指标进行监测,并与星上光轴监视系统测量数据比对。卫星对地光轴指向高精度测定系统收发光轴匹配测试精度优于15 μrad,发射光轴指向测试精度优于20 μrad。
3.3 星地载荷光轴指向测量误差标定
根据调研,国外类似星载激光雷达光轴指向标定方法主要有地面信标标定、航拍标定、反射回波标定和测距标定4种方法。地面信标标定和反射回波标定均需要布置地面信标,且需有较为开阔平整的地面定标场,目前国内缺乏相应的条件。航拍定标方法每次进行定标时需租用飞机进行航拍,满足卫星连续业务化运行要求成本极高。测距标定方法利用星载GPS给出的高精度轨道位置和地球模型精确计算激光发射时卫星理论高度,结合卫星姿态信息计算卫星的理论指向距离;然后与激光雷达自身的测距信息进行比对,通过几何方法计算卫星理论指向距离与激光雷达实测距离偏差,继而得到激光雷达光轴指向误差。测距定标相关方法已应用于机载激光雷达系统标定[12],经过适应性设计,该方法可用于星地激光发射光轴指向标定,可满足卫星低成本、高精度、高频度、连续业务化运行实施要求。星载激光雷达测距标定一般选在广阔平静的海面。
4 结束语
根据大气激光遥感卫星CO2柱线浓度遥感探测原理,简要归纳分析了星载激光雷达测量系统指标体系框架、探测精度影响敏感参数和功能模块配置及星上保障需求,重点从星载激光雷达光机头部的稳定安装、良好机热环境保障及星敏载荷一体化布局等方面,开展总体系统设计保证,初步仿真结果表明方案可行。同时提出了激光雷达波长、能量精度及稳定性实时监测、卫星对地光轴指向高精度测定和星地载荷光轴指向测量误差标定的地面试验验证要求,为激光雷达遥感卫星研制试验和产品保证提供参考。随着工程研制的推进,将陆续开展各项地面试验方案设计和实施验证,确保系统设计的有效性,同时为后续系列卫星改进提供技术参考。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
科学家(2022年3期)2022-04-11
汽车观察(2021年8期)2021-09-01
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
汽车工程(2021年12期)2021-03-08
计算机与网络(2020年19期)2020-12-04
福建基础教育研究(2019年6期)2019-05-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28