
基于恒力机构的香蕉落梳装置设计与自适应性分析
2019-06-27 06:06金莫辉段洁利许泽宇
农业机械学报 2019年6期
杨 洲 郭 杰 金莫辉 段洁利 付 函 许泽宇
(1.华南农业大学工程学院, 广州 510642; 2.华南农业大学工程基础教学与训练中心, 广州 510642)
0 引言
香蕉是重要的经济作物和粮食作物,近年来中国的香蕉种植规模、产量保持了快速增长的态势[1-4]。目前香蕉生产机械化程度较高的国家,如澳大利亚在采收、运输、包装等环节都不同程度地实现了机械化,但落梳环节还是依靠人工[5-6]。落梳是香蕉收获过程中介于采收、运输和清洗、消毒环节中的一项操作,目的是将整梳香蕉从梳柄处与果轴分离。人工落梳作业劳动强度大、生产效率低,且成本昂贵。
目前,国内在落梳机械化环节处于起步阶段,朱正波等[7-8]首次提出香蕉落梳机械化的构想,并成功研制出可以完成香蕉落梳作业的样机。香蕉在果轴上呈螺旋状交错排布,且蕉梳体积和果轴弯曲度随着果轴直径的增大而增大。文献[7-8]针对落梳环节,深入研究香蕉落梳机理,对比人工手动落梳方法,分析了不去轴落梳、回转砍切式去轴落梳、回转锯切式去轴落梳、无冲击插切式去轴落梳和有冲击插切式去轴落梳5种机械化落梳方法,设计并研制了落梳试验样机。落梳试验表明,香蕉果柄处切口质量较好,且满足整串逐梳去轴落梳的条件。为了更好地达到香蕉逐梳去轴连续落梳的目的,有必要对落梳装置的径向自适应性和转动自适应性做进一步深入探讨。
落梳装置中引入恒力机构可以使落梳刀具组对香蕉果轴的夹持力在一定范围内保持恒定,有利于果轴弯曲度变化不大时香蕉的连续落梳,提高刀具组对果轴粗细的径向自适应性。恒力机构(Constant-force mechanism, CFM)是指在无外部设备的辅助下,系统中的运动体在工作行程内可以输出恒力。恒力机构对设备的安全性和可靠性有重要影响,在物体夹持[9]、机器人末端机构[10]等场合已得到广泛的应用。CARRELLA 等[11-13]采用一个竖直线性弹簧和两个斜向线性弹簧相并联的结构形式设计出一种三弹簧恒力机构,并对其静力学特性进行了分析研究,分析表明,当3个弹簧刚度和结构参数满足一定关系时,系统具有恒力特性。LAN 等[14]运用上述三弹簧结构原理,通过静力学和动力学分析获得不同参数对系统恒力范围的影响规律,发现两个线性斜弹簧的初始角在30°~40°范围内时,系统达到较好的恒力效果。落梳装置中转动自适应性是设计具有连续逐梳落梳功能装置时需要考虑的又一重要内容,对于果轴弯曲度变化较大的香蕉落梳显得尤为重要。在汽车驱动系统中通常采用万向节实现变角度动力传递,它允许被连接零件之间的夹角在一定范围内变化。
本文基于万向节的结构和工作原理设计可翻转落梳刀盘,其直径两端对称布置扭簧加载的虎克铰链,可以释放两个空间转动自由度,从而适应果轴弯曲度的变化,铰链处套装的扭转弹簧可减少刀盘翻转时的刚性撞击,提高刀具组对果轴的转动自适应性。在此基础上设计一种基于恒力机构的可自适应环抱蕉茎插切式香蕉落梳装置,并对香蕉落梳装置的自适应性进行分析和试验验证。
1 装置结构与工作原理
1.1 装置结构
基于恒力机构的可自适应环抱蕉茎插切式香蕉落梳装置结构示意图如图1所示,局部细节如图2所示。长×宽×高为460 mm×460 mm×950 mm,装置主要由软硬刀片、刀具组固定块、可运动导杆、公共立柱、扭簧、恒力机构、可翻转刀盘、可升降挡板等组成。

图1 可自适应环抱蕉茎插切式香蕉落梳装置结构 示意图Fig.1 Structure diagram of adaptable banana crown-cutting device by stalk-surrounding and insert-cutting1.环状刀具组 2.刀片固定架 3.刀具组固定块 4.可运动导杆 5.公共立柱 6.扭簧 7.可翻转刀盘 8.可升降挡板 9.机架 10.万向脚轮

图2 可自适应环抱蕉茎插切式香蕉落梳装置 结构俯视图Fig.2 Structure top view of adaptable banana crown- cutting device by stalk-surrounding and insert-cutting1.刀具组固定块 2.恒力机构 3.可翻转刀盘 4.可升降挡板 5.扭簧 6.机架

图3 香蕉落梳装置整机Fig.3 Diagram of banana crown-cutting device1.升降装置 2.蕉穗固定装置 3.蕉穗 4.落梳刀具组 5.机架
1.2 工作原理
工作前,初步估计香蕉果轴弯曲度的变化范围,调节可翻转刀盘和可升降挡板至合适的位置。工作时,从蕉园运输索道上取下蕉穗,将果轴较粗的一端竖直固定在蕉穗升降装置上,确保香蕉果轴的轴线与本装置中落梳刀盘上圆孔的轴线基本重合,升降装置可以带动蕉穗缓慢向下移动,如图3所示。当果轴上第一梳香蕉接触刀具时,图1所示的环状刀具组(即交替铆接的软硬刀片)包络着香蕉果轴缓慢冲击插切香蕉梳柄,从而完成蕉梳与果轴的分离,即成功落梳。随着落梳工作的进行,当后续果轴直径较大处的蕉梳运动至工作空间内时,环状均布排列的6把刀会沿着径向被动地外扩,刀具组固定块处设置的恒力机构确保刀具在设定的行程内外扩时所需要的力几乎保持恒定,实现了果轴径向自适应的目的,且利于后续落梳工作的连续顺畅进行。当落梳至果轴弯曲度较大处时,直径两端对称布置有虎克铰链的可翻转落梳刀盘被动地自适应果轴弯曲度的变化,进而带动刀具组运动,完成仿形落梳工作。
2 径向自适应机构设计与分析
2.1 径向自适应性设计
在线性弹性变形中,弹性体的变形通常遵循胡克定律,即力的大小与机构发生弹性变形成正比。恒力机构却不遵循这一定律,恒力机构是在机构的输出位移发生变化时,所需的输入力在恒力区间内几乎保持恒定[15],如图4所示。

图4 恒力输出原理图Fig.4 Principle diagram of constant-force outputting
恒力机构由硬刀片固定架、水平压缩弹簧、刀组固定块、可运动导杆、公共立柱、斜置压缩弹簧组成。水平压缩弹簧安装在可运动导杆上,可运动导杆穿过刀组固定块且其末端开有螺纹拧在硬刀片固定架上,斜置弹簧安装在硬刀片固定架和公共立柱之间。使用两斜置压缩弹簧的结构引入负刚度再与正刚度的水平压缩弹簧并联组成了恒力机构[16-19]。机构原理图如图5所示,当三弹簧联结点O受到果轴对刀具的径向正压力f时,O点会向D点运动,当越过AB连线继续沿X轴运动时,在一定的位移区间内系统中斜置弹簧会提供负刚度,从而与水平弹簧的正刚度抵消,使得整个系统在此位移区间内对外表现出零刚度的特性。恒力机构如图6所示。
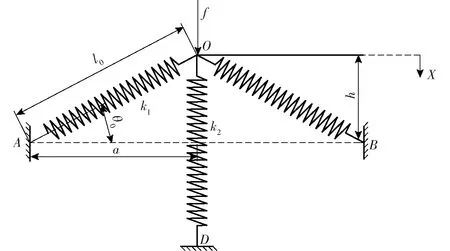
图5 恒力机构原理图Fig.5 Principle diagram of constant-force mechanism

图6 恒力机构结构图Fig.6 Diagram of constant-force device1.硬刀片 2.公共立柱 3.刀片固定架 4.刀组固定块 5.可运动导杆 6.水平压缩弹簧 7.斜置压缩弹簧 8.可升降挡板9.可翻转刀盘 10.固定刀盘
2.2 恒力区域分析
斜置弹簧和水平压缩弹簧的刚度系数分别为k1和k2,斜置弹簧的左固定点A到水平弹簧中心轴线的距离为a,斜置弹簧初始长度为l0,材质为304不锈钢。初始状态时在三弹簧联结点O处施加正压力f,联结点到水平线的距离为h,如图5所示。根据实际落梳的具体要求建立三维模型,其中a=40 mm,h=30 mm,初始状态时斜置弹簧倾斜角θ0=36.87°。水平弹簧选为1 mm×8 mm×60 mm,材质为304不锈钢,刚度系数k2=3 N/mm。
对恒力机构中的斜置弹簧进行静力学分析得
f1=2k1(l0-l)sinθ
(1)

式中θ——斜弹簧倾角,rad
f1——斜弹簧在水平方向的分力,N
l——斜弹簧长度,mm
x——三弹簧联结点O沿X轴坐标值
式(1)整理得
(2)
对恒力机构中的水平弹簧进行静力学分析得
f2=k2x
(3)
式中f2——水平弹簧弹力,N
由式(2)、(3)得到恒力机构的力-位移表达式为
(4)
式(4)对x求导得到恒力机构的刚度-位移表达式为
(5)
式中K——恒力机构刚度系数,N/mm
a、h、k2的值代入式(4)、(5),对斜置弹簧的刚度系数k1取不同值得到力-位移特性曲线和刚度-位移特性曲线,如图7所示。

图7 特性曲线Fig.7 Diagram of characteristic curves
图7结果表明,斜置弹簧刚度系数k1=12 N/mm时机构满足恒力条件,恒力环境下对应的恒力为f=180 N,对应的位移区间为25~35 mm。前期测定香蕉果轴初始端(粗端)直径为41.30~100 mm,平均值为(67.09±8.98) mm;末端(细端)直径为20~64 mm,平均值为(41.75±5.97)mm。在已建立的三维模型中,初始状态时刀具组形成的包络圆直径为30 mm,因此恒力阶段对应的刀具组包络圆直径为80~100 mm,满足实际落梳的工作要求。图8a、8b分别表示果轴直径为40、87 mm时刀具组对果轴径向的自适应情况。

图8 刀具组工作状态仿真图Fig.8 Simulation diagrams of CFM working states
上述分析表明,选用恰当的弹簧和合理设计系统中的几何参数可得到机构的恒力输出区域,恒力输出区域长度可以根据实际情况进行调整。从整体来看,恒力区域长度会受到机构整体尺寸的限制。因此在实际应用中,应根据需要合理选择结构参数,使机构产生的恒力较为精准,而且机构的整体尺寸变小。
3 转动自适应系统设计与分析
3.1 转动自适应系统设计
基于万向节的结构和工作原理并结合加载有扭簧的虎克铰链设计了可释放两个转动自由度的落梳刀盘。转动自适应系统由机架、落梳刀盘、虎克铰链和落梳刀具组共同组成。可翻转刀盘两端设有光轴,通过轴孔配合固定在机架上。机架上安装有可升降挡板,可以调节可翻转刀盘绕其固定轴的旋转角度。此外虎克铰链处套装的扭簧可以减少刀盘翻转时的刚性撞击,提高刀具组对果轴的转动自适应性。转动自适应系统简化示意图如图9所示。
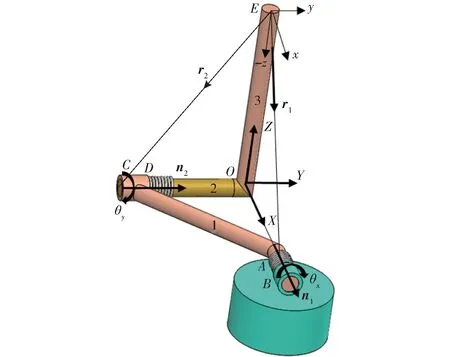
图9 转动自适应系统示意图Fig.9 Schematic diagram of rotational adaptation system
其中杆1、2代表落梳刀盘,杆3代表落梳刀具组。前期测定香蕉果轴的弯曲度为0°~33.7°,平均弯曲度为(9.87±6.01)°。调节可升降挡板(图中未画出)至合适高度以设定杆1、2的旋转角范围为-10°~10°,所设计的转动自适应系统具有空间对称性。
3.2 落梳刀具末端的工作空间分析
香蕉落梳采用自下而上的落梳方式作业,即果轴末端(细端)的蕉梳先被落梳,果轴初始端(粗端)的蕉梳最后被落梳。末端果轴的弯曲度几乎为零,可近似看作圆柱体,落梳时落梳刀盘的工作状态如图10a所示;随着逐梳去轴落梳工作的继续,果轴弯曲度逐渐增大,果轴弯曲度为8°时落梳刀盘的工作状态如图10b所示。

图10 刀盘工作状态仿真图Fig.10 Simulation diagrams of cutting platform working states
落梳刀具工作时其末端的位置在空间具有对称性。可翻转刀盘的旋转角范围为-10°~10°时落梳刀具末端的空间轨迹集合如图11所示,从点云图可以直观地反映刀具末端的运动形态和工作空间,刀具末端的可达工作空间是一个半径为300 mm的球面。工作空间形状紧凑,仿真分析的结果与实际工作空间相符,表明转动自适应系统中的结构参数设计合理,验证了理论模型的正确性。为后续的刀具轨迹规划、动力学分析、运动控制和参数优化提供了重要的参考依据。
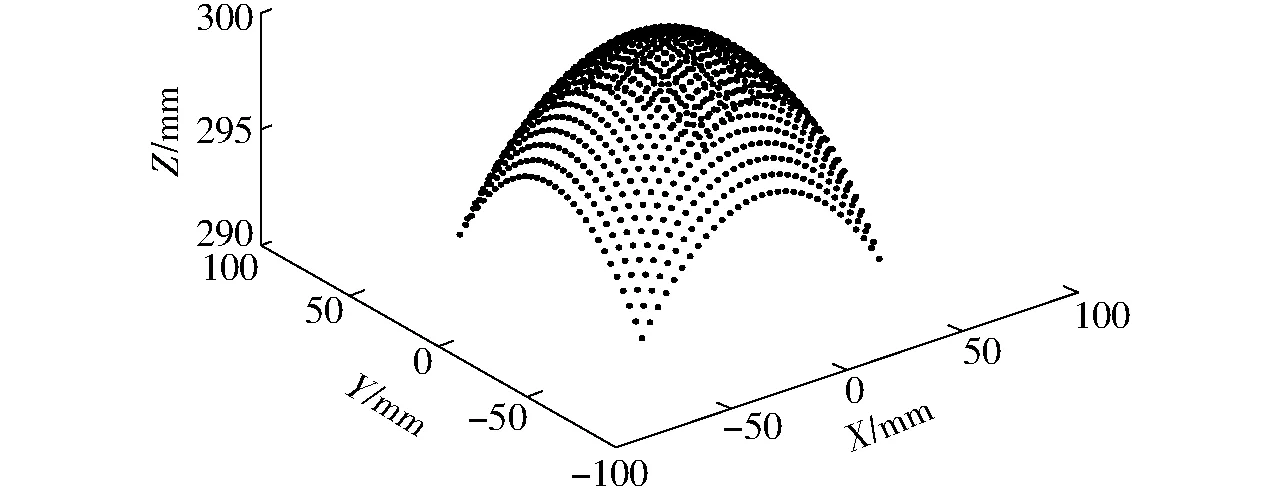
图11 刀具末端工作空间点云图Fig.11 Point cloud diagram of cutter-end workspace
3.3 落梳刀具末端的柔度分析
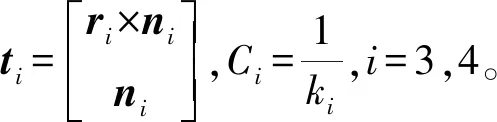
(6)
对柔度矩阵C求逆即可得到该机构末端刚度矩阵K。

图12 坐标示意图Fig.12 Schematic of coordinate

图13 线柔度云图Fig.13 Cloud diagrams of line flexibility
根据柔度矩阵对落梳刀具末端在工作空间内的柔度进行分析[24-25]。落梳刀具工作时其末端位置具有空间对称性,忽略落梳刀具的转动柔度,对可翻转刀盘旋转角范围取0°~10°进行分析,得到X、Y、Z轴方向的线柔度分别如图13a~13c所示。结果显示,在X、Y轴方向上落梳刀具末端的线柔度随刀盘旋转角的增大而减小,最大值为0.409 1 mm/N,最小值分别为0.396 8 mm/N和0.385 1 mm/N;在Z轴方向上落梳刀具末端的柔度随刀盘旋转角的增大而增大,最小值为0 mm/N,最大值为0.023 6 mm/N。绝对坐标系原点O与落梳刀具末端E连线方向的线柔度如图13d所示。结果显示,落梳刀盘旋转角为0°即刀盘与机架上底面平行时线柔度最大,最大值为0.818 2 mm/N;落梳刀盘旋转角为10°时线柔度最小,最小值为0.77 mm/N。说明在落梳刀具组形成的包络圆直径一定时,落梳装置刀具末端的柔度随刀盘旋转角的增大而减小,刚度随刀盘旋转角的增大而增大。OE连线方向的线柔度对选择机构最佳柔度工作区域具有重要意义。
4 试验
4.1 试验条件与方法
(1)试验条件
试验在华南农业大学工程基础教学与训练中心进行,以基于恒力机构的可自适应环抱蕉茎插切式香蕉落梳装置为落梳工作平台。试验所用的蕉穗品种为巴西蕉,试验样本为6挂香蕉共计48梳。采样地点为广东省东莞市典型香蕉园,采样时间为2018年11—12月,所有采样均无病虫害,无明显机械损伤。
(2)试验方法
基于前述理论与仿真分析,香蕉果轴的粗细和弯曲度对落梳装置的落梳自适应性能、落梳成功率、落梳效率等有较大影响,所以试验重点验证了基于恒力机构的落梳装置径向自适应性能和转动自适应性能,并以实际香蕉梳柄的切口质量作为评判依据。
4.2 试验指标
目前国内外在整个香蕉落梳环节中针对落梳后蕉梳的评判并没有明确的指标,本文根据前期在广东省惠州市、东莞市、广州市南沙区和增城区等地调研时蕉农的经验制定了落梳试验指标,包括落梳成功率、切口质量和自适应性。
落梳成功是指落梳刀能将蕉梳从蕉穗上整梳切下。切口质量是指落梳断面平整、光滑;落梳断面不可以连带果轴表皮;不能将果柄切散,且距离果指分叉口3~4 cm,可有效避免蕉梳运移过程受振动作用而散裂。自适应性是指连续落梳的数量以及是否可以整串逐梳去轴落梳,即落梳后果轴上果柄残留部分对下一梳蕉梳的落梳不产生影响,落梳刀可以依次落梳蕉穗上的蕉梳。
4.3 试验结果分析
图14a、14b分别表示果轴直径为40、87 mm时蕉梳的落梳切口。图15a、15b分别表示果轴弯曲度为0°、8°时落梳刀盘的工作状态。

图14 香蕉梳柄切口Fig.14 Diagrams of banana crown incision
此次试验样本为6挂香蕉共计48梳,梳柄切口符合试验指标的蕉梳共39梳,占所有样本的81.25%,落梳成功率100%。试验结果表明该装置可以完成整挂香蕉的连续落梳,刀具组对果轴的自适应性能良好,切口质量良好。
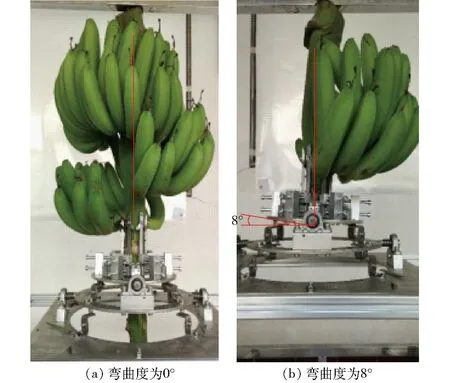
图15 刀盘工作状态Fig.15 Working state diagrams of cutting platform
5 结论
(1)采用两斜置压缩弹簧的结构,引入负刚度,再与正刚度的水平压缩弹簧并联组成恒力机构。斜置压缩弹簧的刚度系数k1=12 N/mm,水平压缩弹簧的刚度系数k2=3 N/mm,初始状态斜置压簧的倾斜角θ0=36.87°,恒力行程内对应的落梳刀组包络圆直径为80~100 mm,对应的恒力f=180 N。上述恒力机构使得落梳刀具组对香蕉果轴的夹持力在一定范围内保持恒定,提高了刀具对香蕉果轴粗细的径向自适应性,保证了整挂香蕉的连续逐梳落梳。
(2)在加载有扭簧的虎克铰链基础上设计了可释放两个转动自由度的落梳刀盘,刀盘旋转角在±10°内得到的落梳刀具末端工作空间是一个半径为300 mm的球面。
(3)整个落梳刀具末端在OE连线方向上的线柔度随着刀盘旋转角的增大而减小,最大值为0.818 2 mm/N,最小值为0.77 mm/N。构造的柔度矩阵表达式简洁、物理意义明确,对柔度矩阵求逆可得到刚度矩阵。
(4)对研制样机进行了试验,试验结果表明,自适应系统中恒力机构和加载有虎克铰链的转动刀盘理论模型正确,机构能在满足被动自适应果轴变化的同时保证落梳作业质量,蕉梳落梳成功率为100%、梳柄切口合格率为81.25%。
猜你喜欢
金属加工(冷加工)(2022年12期)2023-01-05
矿山机械(2022年10期)2022-10-20
中国重型装备(2022年1期)2022-02-11
商品与质量(2021年42期)2021-12-03
洛阳理工学院学报(自然科学版)(2021年2期)2021-07-14
投资者报(2017年18期)2017-05-13
汽车与安全(2016年5期)2016-12-01
发明与创新(2016年5期)2016-08-21
短篇小说(原创版)(2010年7期)2010-06-28
小小说月刊(2010年9期)2010-05-14
